Ruby ist da, installiert, getestet und geflogen...
Anfang Dezember bestellt, ist nun endlich die Sendung angekommen, umständlich, jedoch korrekt über das hiesige Zollamt. Abgabenberechnung EUST aus 351,83 sind 19% = 66,85€.
Dann liegt vor mir eine Blisterpackung, eingeschweißt sind die beiden, gleichgroßen, Zentraleinheit und die Erweiterung, div. Zusatzplatinchen, eine Platine mit dem Staudruckmeßgerät und einem Magnetometer, jede Menge Flachbandkabel mit gekrimpten Steckern und eine Stromversorgungsplatine.
Da ich viel Wartezeit hatte, konnte ich die umfangreichen Html-Seiten ( http://www.uthere.com/products/ruby/documentation/documentation_index.html usw) der Webseite studieren.
Los gings mit dem Plug and Play Zusammenbau. Alles passte bis auf die Stromversorgung. Hierzu benötigt man den Lötkolben, einmal ist das Kabel zum Lipostecker anzulöten und am Ausgang 2 Kabelpaare.
Jim Hall will nämlich 2 BEC angebracht wissen, eines zur Stromversorgung von Nuby, das zweite zum Ansteuern des Motors. Im letzteren ist das +Kabel des Steckers entfernt.
Zunächst mal alles auf dem Tisch zusammengebaut stellte ich fest, daß auf simuliertes Nicken des Modelles das Seitenruder ( EasyStar ohne Querruder) ansprach. Sinngemäß auf Rollen das Höhenruder.
Schon war ein Mail mit der angefügten .utcfg Datei (aus dem Ordner Ruby in der Micro-SD-Karte in der Erweiterungsplatine) an Jim Hall unterwegs..
15 Minuten später kam die Antwort mit der neuen .utcfg Datei.
Jetzt waren die Steuerbewegungen richtig.
Also entfernte ich Feiyu31Ap aus dem EasyStar und platzierte stattdessen Nuby.
Die Staudruckplatine montierte ich ziemlich weit außen im Flügel und zwar die Platine parallel zur Zentraleinheit im Rumpf ausgerichtet. Das ca 60cm lange Anschlußkabel versenkte ich in einem Schlitz im Schaum und nach vorne schaut ein 6cm langes Pitotrohr in Form eines dicken Spritschlauches heraus. Das sieht richtig gut aus.
Nach umfangreichen Tests erbat Jim Hall die letzte .utd Data zur Überprüfung mittels Mail.
Dann kam das OK zum 1. Start.
Sonntag 13. Januar. Wetter: diesig, Hochnebel, Untergrenze ca 100m, NO Wind.
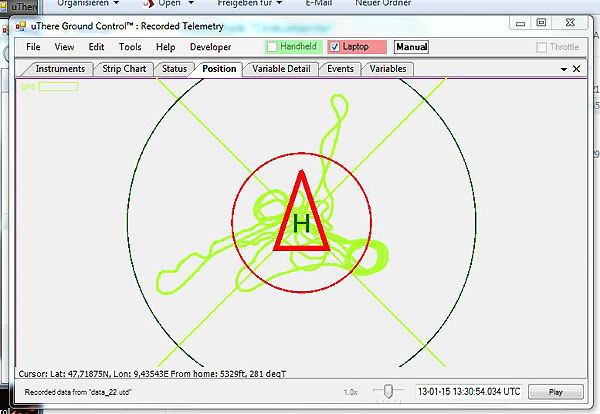
Der 3-Positionsschalter ist in Manual-Stellung. Da dieser EasyStar schon über 200 Flüge hat, waren Start und Flug keine Überraschung.
Jetzt Schalter Mittelstellung in Aided (oder Stabilized ) Funktion.
Das Modell holt zunächst mal Fahrt auf, geht dann waagerecht und stellt sich die passende Motordrehzahl ein. Die Höhe bleibt konstant.
Eine von mir gesteuerte Umkehrkurve macht das Modell und kommt schnurgerade zurück. Eine kleine Kurve nach Rechts, dann Querruder(= Seitenruder) auf Null und das Modell fliegt wieder waagerecht und geradeaus.
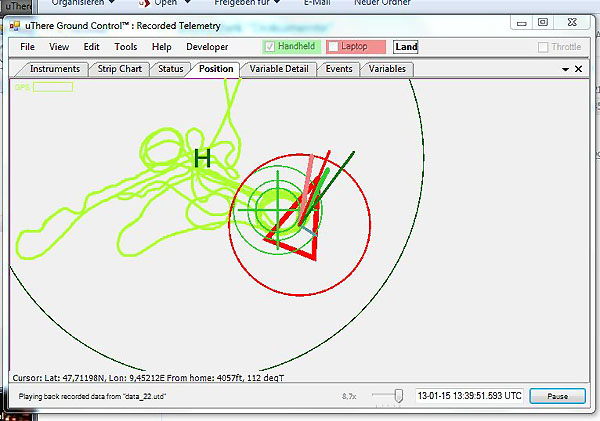
Jetzt gehts zur Sache: Den Schalter in Endstellung Autonomer Modus, zunächst Kreisen ( Loiter).
Das Modell beginnt einen Kreis, gaanz laangsam, ach ja, Gegenwind, dreht quer zum Wind, und im Mittwindflug mit fast 60 Grad Querneigung wieder aus dem Wind heraus erneut in den Gegenwind.
Das ist so verblüffend, daß ich vor lauter Kreisen fast die Zeit vergesse.
Das Modell fliegt den Kreis über Grund.
Jetzt noch schnell die RTH -Funktion. Den Schalter 2x aus der Endstellung in die Mittenstellung und zurück gedipt und schon dreht das Modell auf mich zu. OK, Geht auch.
Soll ich noch eine automatische Landung probieren?
Also den Schalter wie soeben , aber 3x gedipt. Aber was ist das? Das Modell haut ab. Es fliegt zunächst mal weg! Erst ganz weit ( ca 200m) macht es eine Kurve wieder zurück.
Wegen der sehr schlechten Sicht breche ich ab und lasse den EasyStar mittels RTH wieder zurückkommen.
Landung und große Erleichterung.
Fortsetzung folgt.
LG
Anfang Dezember bestellt, ist nun endlich die Sendung angekommen, umständlich, jedoch korrekt über das hiesige Zollamt. Abgabenberechnung EUST aus 351,83 sind 19% = 66,85€.
Dann liegt vor mir eine Blisterpackung, eingeschweißt sind die beiden, gleichgroßen, Zentraleinheit und die Erweiterung, div. Zusatzplatinchen, eine Platine mit dem Staudruckmeßgerät und einem Magnetometer, jede Menge Flachbandkabel mit gekrimpten Steckern und eine Stromversorgungsplatine.
Da ich viel Wartezeit hatte, konnte ich die umfangreichen Html-Seiten ( http://www.uthere.com/products/ruby/documentation/documentation_index.html usw) der Webseite studieren.
Los gings mit dem Plug and Play Zusammenbau. Alles passte bis auf die Stromversorgung. Hierzu benötigt man den Lötkolben, einmal ist das Kabel zum Lipostecker anzulöten und am Ausgang 2 Kabelpaare.
Jim Hall will nämlich 2 BEC angebracht wissen, eines zur Stromversorgung von Nuby, das zweite zum Ansteuern des Motors. Im letzteren ist das +Kabel des Steckers entfernt.
Zunächst mal alles auf dem Tisch zusammengebaut stellte ich fest, daß auf simuliertes Nicken des Modelles das Seitenruder ( EasyStar ohne Querruder) ansprach. Sinngemäß auf Rollen das Höhenruder.
Schon war ein Mail mit der angefügten .utcfg Datei (aus dem Ordner Ruby in der Micro-SD-Karte in der Erweiterungsplatine) an Jim Hall unterwegs..
15 Minuten später kam die Antwort mit der neuen .utcfg Datei.
Jetzt waren die Steuerbewegungen richtig.
Also entfernte ich Feiyu31Ap aus dem EasyStar und platzierte stattdessen Nuby.
Die Staudruckplatine montierte ich ziemlich weit außen im Flügel und zwar die Platine parallel zur Zentraleinheit im Rumpf ausgerichtet. Das ca 60cm lange Anschlußkabel versenkte ich in einem Schlitz im Schaum und nach vorne schaut ein 6cm langes Pitotrohr in Form eines dicken Spritschlauches heraus. Das sieht richtig gut aus.
Nach umfangreichen Tests erbat Jim Hall die letzte .utd Data zur Überprüfung mittels Mail.
Dann kam das OK zum 1. Start.
Sonntag 13. Januar. Wetter: diesig, Hochnebel, Untergrenze ca 100m, NO Wind.
Der 3-Positionsschalter ist in Manual-Stellung. Da dieser EasyStar schon über 200 Flüge hat, waren Start und Flug keine Überraschung.
Jetzt Schalter Mittelstellung in Aided (oder Stabilized ) Funktion.
Das Modell holt zunächst mal Fahrt auf, geht dann waagerecht und stellt sich die passende Motordrehzahl ein. Die Höhe bleibt konstant.
Eine von mir gesteuerte Umkehrkurve macht das Modell und kommt schnurgerade zurück. Eine kleine Kurve nach Rechts, dann Querruder(= Seitenruder) auf Null und das Modell fliegt wieder waagerecht und geradeaus.
Jetzt gehts zur Sache: Den Schalter in Endstellung Autonomer Modus, zunächst Kreisen ( Loiter).
Das Modell beginnt einen Kreis, gaanz laangsam, ach ja, Gegenwind, dreht quer zum Wind, und im Mittwindflug mit fast 60 Grad Querneigung wieder aus dem Wind heraus erneut in den Gegenwind.
Das ist so verblüffend, daß ich vor lauter Kreisen fast die Zeit vergesse.
Das Modell fliegt den Kreis über Grund.
Jetzt noch schnell die RTH -Funktion. Den Schalter 2x aus der Endstellung in die Mittenstellung und zurück gedipt und schon dreht das Modell auf mich zu. OK, Geht auch.
Soll ich noch eine automatische Landung probieren?
Also den Schalter wie soeben , aber 3x gedipt. Aber was ist das? Das Modell haut ab. Es fliegt zunächst mal weg! Erst ganz weit ( ca 200m) macht es eine Kurve wieder zurück.
Wegen der sehr schlechten Sicht breche ich ab und lasse den EasyStar mittels RTH wieder zurückkommen.
Landung und große Erleichterung.
Fortsetzung folgt.
LG
Zuletzt bearbeitet: