Hi Carbo
ein Dankeschön an den Tester. Ein Feedback, das Hand und Fuss hat. Ich hab mal zu Testzwecken einen Zähler eingefügt. der alle 500ms raufzählt und das in der Taranis ausgelesen. Tatsächlich - so liess sich Deine Beobachtung nachvollziehen. Dasselbe, wenn die Daten &vario eingefüttert werden. Ich werde mir das in den nächsten 1-2 Wochen mal genauer anschauen - bin noch an der MPU9250 und MS5611 dran, und das möchte ich wenn ich gerade "drin" bin vorher auf 90% bringen.
mfg hw
ein Dankeschön an den Tester. Ein Feedback, das Hand und Fuss hat. Ich hab mal zu Testzwecken einen Zähler eingefügt. der alle 500ms raufzählt und das in der Taranis ausgelesen. Tatsächlich - so liess sich Deine Beobachtung nachvollziehen. Dasselbe, wenn die Daten &vario eingefüttert werden. Ich werde mir das in den nächsten 1-2 Wochen mal genauer anschauen - bin noch an der MPU9250 und MS5611 dran, und das möchte ich wenn ich gerade "drin" bin vorher auf 90% bringen.
mfg hw
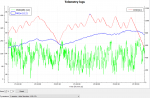
 ) und einem X8R in 1100 m Entfernung. Man sieht, dass bei ordentlicher Installation noch eine Menge Sicherheitsreserve beim RSSI da ist.
) und einem X8R in 1100 m Entfernung. Man sieht, dass bei ordentlicher Installation noch eine Menge Sicherheitsreserve beim RSSI da ist.