
ich muss meine Aussagen da zurücknehmen - habe gerade im WIKI nachgelesen: http://copter.ardupilot.com/wiki/autotune/
Nach dem Autotune Flug fliegt der Copter mit den alten Pids weiter! Die neuen Pids werden erst gespeichert wie im WIKI beschrieben!
Nach dem Autotune Flug fliegt der Copter mit den alten Pids weiter! Die neuen Pids werden erst gespeichert wie im WIKI beschrieben!
Im WIKI steht auch, dass es bisher nur Probleme gab bei:
1. Hoher Dämpfung der APM FC
2. Zu flexiblen Auslegern
Eventuell ist einer der obrigen baulichen Parameter/Konstruktion bei Dir nicht optimal?
1. Hoher Dämpfung der APM FC
2. Zu flexiblen Auslegern
Eventuell ist einer der obrigen baulichen Parameter/Konstruktion bei Dir nicht optimal?
Vibrationen sind nicht so stark. Habe zwar aktuell das Loging etwas eingeschränkt, aber vor einiger Zeit hatte ich mal das raw Logging aktiviert und da sah man, dass die Vibrationen sehr gering sind.
Es ist halt ein Selbstbaucopter. Centerplates sind aus Sperrholz ausgeschnitten und die Ausleger sind 10mm Aluvierkant.
Motoren sind die Suppos mit 1000kV. Die laufen eigentlich ziemlich ruhig.
Nachdem ich demnächste meinen neuen Hexacopterrahmen samt neuen Motoren, Reglern und Propeller bekomme, werde ich da jetzt auch nicht großartig herumbasteln. Ich habe eh schon überlegt den Y6 überhaupt zu verkaufen oder zu zerlegen und die Einzelteile zu verkaufen.
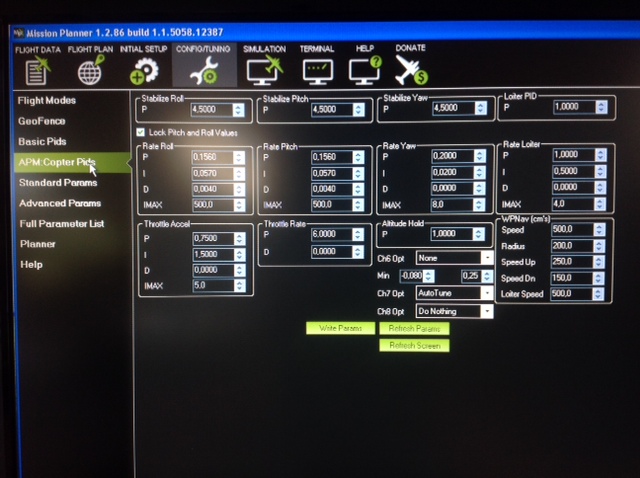
Heute war ich wieder damit fliegen, nachdem ich alle PIDs auf Default zurück gestellt habe. Ich lasse das gleich mal so, weil der damit eigentlich sehr gut fliegt.
Insofern darf er jetzt ungetuned mit den Defaults fliegen. Das macht er auch brav.
Autotune gibt es dann wieder wenn der neue Hexa aufgebaut ist.

") Insbesondere bei einem doch etwas ungewöhnlichen Antriebssetup wie bei dir. Habe auf RCGroups von dortigen APM-Freaks gelesen, dass AT wohl nicht so gut mit großen Props auf langsamen Motoren klarkäme; schön zu wissen, dass dem nicht zwingend so ist.
Insbesondere bei einem doch etwas ungewöhnlichen Antriebssetup wie bei dir. Habe auf RCGroups von dortigen APM-Freaks gelesen, dass AT wohl nicht so gut mit großen Props auf langsamen Motoren klarkäme; schön zu wissen, dass dem nicht zwingend so ist.


