
WiiCopter - Allgemeine Fragen, Probleme, Links, News
- Themenstarter Grandcaravan
- Beginndatum
Frage hat den schon wer im Einsatz http://www.myrcmodel.com/index.php?main_page=product_info&cPath=90_168&products_id=3540
Kann der was??
Kann der was??
Ich bin verwirrt 
Bisher bin ich davon ausgegangen dass der Gyro den Winkel gibt und der Acc die Beschleunigungen - einfach vom Wort "Accelerometer" her.
Auch vom Thema WMP passte das - WMP arbeitet über Winkel, der Nunchuck über Beschleunigung.
1: Jetzt habe ich aber in der GUI bemerkt dass ACC die WInkeländerung im Graph zeigt und GYRO die Beschleunigung ??
2: Und beim Heli heißt der Sensor ja auch Gyro, arbeitet aber über Beschleunigung anstatt den Winkel
Was ist nun richtig?
Ich bin immernoch davon überzeugt dass ein ACC die Beschleunigung misst und der Gyro den Winkel.
Heli-Flieger und die MultiWii GUI sehen das aber vermutlich anders
Gruß
Sandro
Bisher bin ich davon ausgegangen dass der Gyro den Winkel gibt und der Acc die Beschleunigungen - einfach vom Wort "Accelerometer" her.
Auch vom Thema WMP passte das - WMP arbeitet über Winkel, der Nunchuck über Beschleunigung.
1: Jetzt habe ich aber in der GUI bemerkt dass ACC die WInkeländerung im Graph zeigt und GYRO die Beschleunigung ??
2: Und beim Heli heißt der Sensor ja auch Gyro, arbeitet aber über Beschleunigung anstatt den Winkel
Was ist nun richtig?
Ich bin immernoch davon überzeugt dass ein ACC die Beschleunigung misst und der Gyro den Winkel.
Heli-Flieger und die MultiWii GUI sehen das aber vermutlich anders
Gruß
Sandro
J
um genauer zu sein - der gyro misst die winkelgeschwindiglkeit... http://de.wikipedia.org/wiki/Winkelgeschwindigkeit
der acc die beschleunigung (wobei die beschleunigung im ruhenden zustand nach unten immer 9.81m/s² ist) je nach kippung des copters dann mehr oder weniger auf die achsen verteilt. beim bewegen des copters zustzlich die beschleunigung der bewegung - also deswegen wird ein copter auch mit acc immer driften wenners einmal tut - weil... drift hat NULL beschleunigung...
der acc die beschleunigung (wobei die beschleunigung im ruhenden zustand nach unten immer 9.81m/s² ist) je nach kippung des copters dann mehr oder weniger auf die achsen verteilt. beim bewegen des copters zustzlich die beschleunigung der bewegung - also deswegen wird ein copter auch mit acc immer driften wenners einmal tut - weil... drift hat NULL beschleunigung...
J
nein, der acc fungiert quasi als "Lot" so wie er programmiert ist... gyro hält den copter so, dass er sich nicht um irgendeine achse dreht egal wie der sich im raum befindet, hält also die von dir gesteuerte neigung - acc hält ihn in waage... aber eben nur in waage - deswegen kann er auch driften und bleibt nicht wie viele es gern hätten auf der stelle stehn trotz acc
kompassmodul (mag) kann winkel relativ zum erdmagnetfeld messen und damit wenigstens dem copter bescheid geben in welche richtung er schaut, erst mit vernünftigem zusammenwirken von GPS, kompass, acc und baro ist es möglich (siehe NAZA) den copter auf einen punkt zu nageln und das trotz wind.
kompassmodul (mag) kann winkel relativ zum erdmagnetfeld messen und damit wenigstens dem copter bescheid geben in welche richtung er schaut, erst mit vernünftigem zusammenwirken von GPS, kompass, acc und baro ist es möglich (siehe NAZA) den copter auf einen punkt zu nageln und das trotz wind.
Hallo,
ich habe mal ne grundlegende Frage,
wie soll/muß das Verhältnis Abfluggewicht/Schub(Leistung) bei einem Quadkopter für einen Einsteiger sein?
Gruß Hein
ich habe mal ne grundlegende Frage,
wie soll/muß das Verhältnis Abfluggewicht/Schub(Leistung) bei einem Quadkopter für einen Einsteiger sein?
Gruß Hein
Es gibt da schon einen Flugzeitrechner bei dem man verschiedene Konfigurationen durchspielen kann.
Aber grob gerechnet sollte das Maximale Abfluggewicht je Motor das 5 fache seines Eigengewichtes(des Motors) betragen und das 10 fache seines Eigengewichtes(des Motors) nicht überschreiten. Leichter ist besser. Klar.
Bsp. http://www.voelkner.de/products/112885/Brushless-Motor-Roxxy-Brushless-Outrunner-2827-34.html
Motor 57g *10 als Höchstfaktor * 4Motore rund 2000g das ist die Kotzgrenze zum fliegen!
Besser Abfluggewicht unter 1000g!
Wie gesagt Gewicht ist unkritisch fliegt halt ne Minute länger oder kürzer. Da man am Anfang doch nicht so gut Fliegen kann lieber einen robusten Frame bauen OBF 10er Aluvierkant ....
Warum so kompliziert. Ich denke ein Schub/Gewichtsverhältnis von 3:1 ist ganz gut. 2:1 dürfte als Anfänger wo man erst mal versucht das Ding auf der Stelle zu halten wohl die unterste Grenze sein. Es könnte dann aber schon schwierig einen schnellen Sinkflug im Notfall noch rechtzeitig aufzufangen.
Gruß Hein
Hi
Ich bräuchte mal nen Denkanstoss
Habe mir einen Quad zusammengebaut mit diesem Board (http://witespyquad.gostorego.com/flight-controllers/multiwii-pro-2-0-flight-controller.html), MWC 2.1
Problem ist, dass der Kompass nicht funktioniert. Der Copter driftet munter nach rechts. Nur mit einem Gegenhalten kann ich ihn in Position halten, aber sobald ich den Hebel wieder loslasse, gehts wieder rund. Habe mal versucht die Trimmung zu verändern (was man ja nicht macht), wonach er dann ruhig stand.. aber immer noch keine Kompasswirkung zeigte (Ich konnte ihn munter mit der Hand drehen, ohne dass er zurücksteuerte)
Im Grunde ist dieses Board eine FreeImu V043
Natürlich hab ich ACC kalibriert, im freien den MAG mehrmals kalibriert.
Auch beim Gasgeben zeigt der Kompass in der GUI keine Zuckungen, auch die Werte des Kompass stehen stabil (+/- 5)
Jetzt weiß ich nicht mehr, woran es noch liegen könnte
Habt ihr ne Idee ?
Gruß Karsten
Ich bräuchte mal nen Denkanstoss
Habe mir einen Quad zusammengebaut mit diesem Board (http://witespyquad.gostorego.com/flight-controllers/multiwii-pro-2-0-flight-controller.html), MWC 2.1
Problem ist, dass der Kompass nicht funktioniert. Der Copter driftet munter nach rechts. Nur mit einem Gegenhalten kann ich ihn in Position halten, aber sobald ich den Hebel wieder loslasse, gehts wieder rund. Habe mal versucht die Trimmung zu verändern (was man ja nicht macht), wonach er dann ruhig stand.. aber immer noch keine Kompasswirkung zeigte (Ich konnte ihn munter mit der Hand drehen, ohne dass er zurücksteuerte)
Im Grunde ist dieses Board eine FreeImu V043
Natürlich hab ich ACC kalibriert, im freien den MAG mehrmals kalibriert.
Auch beim Gasgeben zeigt der Kompass in der GUI keine Zuckungen, auch die Werte des Kompass stehen stabil (+/- 5)
Jetzt weiß ich nicht mehr, woran es noch liegen könnte
Habt ihr ne Idee ?
Gruß Karsten
Warum so kompliziert. Ich denke ein Schub/Gewichtsverhältnis von 3:1 ist ganz gut. 2:1 dürfte als Anfänger wo man erst mal versucht das Ding auf der Stelle zu halten wohl die unterste Grenze sein. Es könnte dann aber schon schwierig einen schnellen Sinkflug im Notfall noch rechtzeitig aufzufangen.
Wie ist das mit dem 3:1 gemeint? also welche werte stellst du da gegeneinander? So wie fdietsch die einzelnen gewichte oder die Leistung zum gewicht?
keiner ne Idee?
Hi
Ich bräuchte mal nen Denkanstoss
Habe mir einen Quad zusammengebaut mit diesem Board (http://witespyquad.gostorego.com/flight-controllers/multiwii-pro-2-0-flight-controller.html), MWC 2.1
Problem ist, dass der Kompass nicht funktioniert. Der Copter driftet munter nach rechts. Nur mit einem Gegenhalten kann ich ihn in Position halten, aber sobald ich den Hebel wieder loslasse, gehts wieder rund. Habe mal versucht die Trimmung zu verändern (was man ja nicht macht), wonach er dann ruhig stand.. aber immer noch keine Kompasswirkung zeigte (Ich konnte ihn munter mit der Hand drehen, ohne dass er zurücksteuerte)
Im Grunde ist dieses Board eine FreeImu V043
Natürlich hab ich ACC kalibriert, im freien den MAG mehrmals kalibriert.
Auch beim Gasgeben zeigt der Kompass in der GUI keine Zuckungen, auch die Werte des Kompass stehen stabil (+/- 5)
Jetzt weiß ich nicht mehr, woran es noch liegen könnte
Habt ihr ne Idee ?
Gruß Karsten
Ich bräuchte mal nen Denkanstoss
Habe mir einen Quad zusammengebaut mit diesem Board (http://witespyquad.gostorego.com/flight-controllers/multiwii-pro-2-0-flight-controller.html), MWC 2.1
Problem ist, dass der Kompass nicht funktioniert. Der Copter driftet munter nach rechts. Nur mit einem Gegenhalten kann ich ihn in Position halten, aber sobald ich den Hebel wieder loslasse, gehts wieder rund. Habe mal versucht die Trimmung zu verändern (was man ja nicht macht), wonach er dann ruhig stand.. aber immer noch keine Kompasswirkung zeigte (Ich konnte ihn munter mit der Hand drehen, ohne dass er zurücksteuerte)
Im Grunde ist dieses Board eine FreeImu V043
Natürlich hab ich ACC kalibriert, im freien den MAG mehrmals kalibriert.
Auch beim Gasgeben zeigt der Kompass in der GUI keine Zuckungen, auch die Werte des Kompass stehen stabil (+/- 5)
Jetzt weiß ich nicht mehr, woran es noch liegen könnte
Habt ihr ne Idee ?
Gruß Karsten

Warum soll das Board nur unter der Win GUI laufen ?
Welche Version hast du drauf die neuen versionen sind nicht kompatibel zur wingui. Ich hab mich mal einen Tag versaut weil mein GPS nicht ging. Lag daran daß der Mag nicht an war. Die Zuordnung der Felder für Aux hat sich geändert hier ein Bild von einer FC alles gleich mit verschiedenen GUIs.
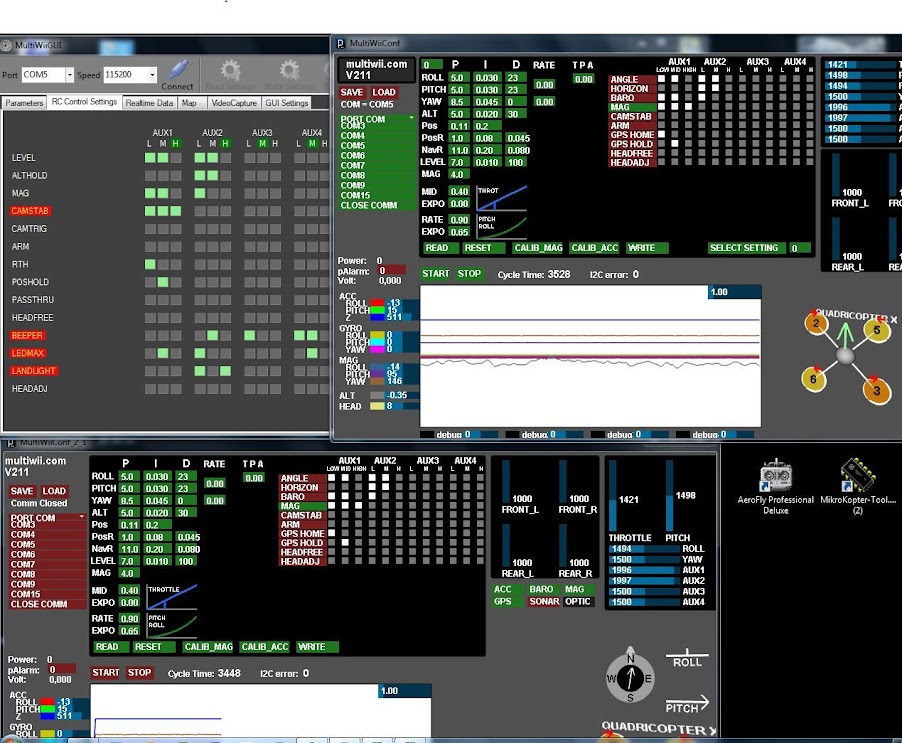
http://fpv-community.de/showthread.php?14199-Baro-Code-%C4nderungen&p=276275&viewfull=1#post276275
Welche Version hast du drauf die neuen versionen sind nicht kompatibel zur wingui. Ich hab mich mal einen Tag versaut weil mein GPS nicht ging. Lag daran daß der Mag nicht an war. Die Zuordnung der Felder für Aux hat sich geändert hier ein Bild von einer FC alles gleich mit verschiedenen GUIs.
http://fpv-community.de/showthread.php?14199-Baro-Code-%C4nderungen&p=276275&viewfull=1#post276275

