
Hallo Ihr möchte mich vorstellen. Buschplilot 56 jahre, Copter Angie , mit Naze 32
- Themenstarter elrond
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Guten Tag Tilman
Erkläre mir doch erst einmal was ein Rate Mode ist.
Dann habe ich mir gedacht das ich euch ein anderes Filmchen zeige . Das ist am gleichen Tag gemacht...
http://fpv-community.de/showthread.php?26007-Testflug-Quadrixe
Langsam weiß ich auch nicht mehr weiter.
Habe mit 8 prop versucht mit 10er
habe mit Schwingungsdämpfer 10X8 und ohne versucht .....
dann habe ich alle Motoren Roxxy 2824.34 Mit Laser Gewuchtet.
Propeller gewuchtet .
Eine andere Steuerung ( Plejad Celaeno ) ausprobiert.
immer gleich ...
Alex
Erkläre mir doch erst einmal was ein Rate Mode ist.
Dann habe ich mir gedacht das ich euch ein anderes Filmchen zeige . Das ist am gleichen Tag gemacht...
http://fpv-community.de/showthread.php?26007-Testflug-Quadrixe
Langsam weiß ich auch nicht mehr weiter.
Habe mit 8 prop versucht mit 10er
habe mit Schwingungsdämpfer 10X8 und ohne versucht .....
dann habe ich alle Motoren Roxxy 2824.34 Mit Laser Gewuchtet.
Propeller gewuchtet .
Eine andere Steuerung ( Plejad Celaeno ) ausprobiert.
immer gleich ...
Alex
Zuletzt bearbeitet:
@skyfreak
Nur ein ganz kleiner Vergleich, montiere mal ein Rad mit einer 8 an dein Fahrrad und dreh ein paar Runden. Obwohl nur das eine Rad nicht Rund läuft, werden deine Innereien trotzdem kräftig durchgeschüttelt.....nicht gerührt. Beim Copter ist es genau dasselbe. Da der Copterrahmen nicht in einen Schraubstock gespannt ist und sich frei bewegen kann, kompensiert er sozusagen einen gewissen Teil der Unwucht, auch wenn es sich nur um einen Antrieb handelt. Das ist auch häufig der Auslöser für Drift auf dem Yaw. Die Sensoren werden dermassen durchgeschüttelt/durchvibriert, dass sie den reinsten Kater haben und nix mehr kapieren.
Nur ein ganz kleiner Vergleich, montiere mal ein Rad mit einer 8 an dein Fahrrad und dreh ein paar Runden. Obwohl nur das eine Rad nicht Rund läuft, werden deine Innereien trotzdem kräftig durchgeschüttelt.....nicht gerührt. Beim Copter ist es genau dasselbe. Da der Copterrahmen nicht in einen Schraubstock gespannt ist und sich frei bewegen kann, kompensiert er sozusagen einen gewissen Teil der Unwucht, auch wenn es sich nur um einen Antrieb handelt. Das ist auch häufig der Auslöser für Drift auf dem Yaw. Die Sensoren werden dermassen durchgeschüttelt/durchvibriert, dass sie den reinsten Kater haben und nix mehr kapieren.







@skyfreak
Nur ein ganz kleiner Vergleich, montiere mal ein Rad mit einer 8 an dein Fahrrad und dreh ein paar Runden. Obwohl nur das eine Rad nicht Rund läuft, werden deine Innereien trotzdem kräftig durchgeschüttelt.....nicht gerührt. Beim Copter ist es genau dasselbe. Da der Copterrahmen nicht in einen Schraubstock gespannt ist und sich frei bewegen kann, kompensiert er sozusagen einen gewissen Teil der Unwucht, auch wenn es sich nur um einen Antrieb handelt. Das ist auch häufig der Auslöser für Drift auf dem Yaw. Die Sensoren werden dermassen durchgeschüttelt/durchvibriert, dass sie den reinsten Kater haben und nix mehr kapieren.
Nur ein ganz kleiner Vergleich, montiere mal ein Rad mit einer 8 an dein Fahrrad und dreh ein paar Runden. Obwohl nur das eine Rad nicht Rund läuft, werden deine Innereien trotzdem kräftig durchgeschüttelt.....nicht gerührt. Beim Copter ist es genau dasselbe. Da der Copterrahmen nicht in einen Schraubstock gespannt ist und sich frei bewegen kann, kompensiert er sozusagen einen gewissen Teil der Unwucht, auch wenn es sich nur um einen Antrieb handelt. Das ist auch häufig der Auslöser für Drift auf dem Yaw. Die Sensoren werden dermassen durchgeschüttelt/durchvibriert, dass sie den reinsten Kater haben und nix mehr kapieren.
komisch ist nur, dass es eben bei allen mit wirklich den unterschiedlichsten setups immer mit Default settings läuft. dji naza, MK, naze 32/acro, HK boards ... you name it ... noch keiner hat probleme gemeldet.
ich bin ja auch kein crack, aber was sagen denn die Profis ... kann es sein dass die regler mit der naze einfach nicht können?
ansonsten bin ich wirklich ratlos.
Es könnte sein, dass hier ausnahmsweise einmal die Sensoren gedämpft werden müssen, da ein Vollkarbonframe extrem starr sein sollte. Die meisten Frames geben hier und da ein winziges bisschen nach. Das reicht manchmal schon, dass auf Dämmungen verzichtet werden kann. Je nach Frame und dem restlichen Setup, "können" Rapid-ESCs zu einem muss werden. Gerade bei kleineren Koptern ist eine möglichst schnelle und präzise Reaktion aller Komponenten gefragt. Es kann ja probeweise wie bei FBL-Systemen üblich, ein weicher Schaumstoff unter dem Board angebracht werden. Im schlimmsten Fall hat es nichts gebracht.
was ist ein FBL System
kannst du mir das erklären xAlex
Es könnte sein, dass hier ausnahmsweise einmal die Sensoren gedämpft werden müssen, da ein Vollkarbonframe extrem starr sein sollte. Die meisten Frames geben hier und da ein winziges bisschen nach. Das reicht manchmal schon, dass auf Dämmungen verzichtet werden kann. Je nach Frame und dem restlichen Setup, "können" Rapid-ESCs zu einem muss werden. Gerade bei kleineren Koptern ist eine möglichst schnelle und präzise Reaktion aller Komponenten gefragt. Es kann ja probeweise wie bei FBL-Systemen üblich, ein weicher Schaumstoff unter dem Board angebracht werden. Im schlimmsten Fall hat es nichts gebracht.
Guten Tag Tilman
Erkläre mir doch erst einmal was ein Rate Mode ist.
Erkläre mir doch erst einmal was ein Rate Mode ist.
Rate Mode = nur mit Gyro stabilisiert, kein Lageausgleich
Da Du jedoch in dem anderen Video Flips schlägst, muss ich meine Vermutung wohl zurück nehmen, denn offensichtlich brauchst Du keinen ACC zum fliegen.
Eine alternative Idee kann ich Dir leider momentan nicht bieten. ESCs sind ordentlich angelernt? Motoren und Props zigtausend Mal auf korrekte Drehrichtung geprüft? Eventuell mal ACC_HW = 2 eingestellt? Wirkrichtung der Kanäle (Knüppel) geprüft? Naze richtig herum montiert (ESC-Anschlüsse nach vorne)? Mehr fällt mir auf Anhieb auch nicht ein.
Zuletzt bearbeitet:
Hallo Alex,
Rate Mode = nur mit Gyro stabilisiert, kein Lageausgleich
Da Du jedoch in dem anderen Video Flips schlägst, muss ich meine Vermutung wohl zurück nehmen, denn offensichtlich brauchst Du keinen ACC zum fliegen.
Eine alternative Idee kann ich Dir leider momentan nicht bieten. ESCs sind ordentlich angelernt? Motoren und Props zigtausend Mal auf korrekte Drehrichtung geprüft? Eventuell mal ACC_HW = 2 eingestellt? Wirkrichtung der Kanäle (Knüppel) geprüft? Naze richtig herum montiert (ESC-Anschlüsse nach vorne)? Mehr fällt mir auf Anhieb auch nicht ein.
Rate Mode = nur mit Gyro stabilisiert, kein Lageausgleich
Da Du jedoch in dem anderen Video Flips schlägst, muss ich meine Vermutung wohl zurück nehmen, denn offensichtlich brauchst Du keinen ACC zum fliegen.
Eine alternative Idee kann ich Dir leider momentan nicht bieten. ESCs sind ordentlich angelernt? Motoren und Props zigtausend Mal auf korrekte Drehrichtung geprüft? Eventuell mal ACC_HW = 2 eingestellt? Wirkrichtung der Kanäle (Knüppel) geprüft? Naze richtig herum montiert (ESC-Anschlüsse nach vorne)? Mehr fällt mir auf Anhieb auch nicht ein.
Also das gleiche wir HH Modus
Alex
... was mir jetzt auch noch in den sinn kommt:
drüben im MK form gibt es ja auch eine menge piloten die den rahmen fliegen.
http://forum.mikrokopter.de/topic-38424.html
vielleicht magst du da auch noch mal nachfragen ob der eine oder andere
a) tips und infos hätte
b) in deiner nähe ist zum gemeinsamen live fehlersuchen
happy landings,
der skyfreak
drüben im MK form gibt es ja auch eine menge piloten die den rahmen fliegen.
http://forum.mikrokopter.de/topic-38424.html
vielleicht magst du da auch noch mal nachfragen ob der eine oder andere
a) tips und infos hätte
b) in deiner nähe ist zum gemeinsamen live fehlersuchen
happy landings,
der skyfreak
Guten Abend .....
Damit auch Ihr ein schönen Feiertag habt ......
Ich habe nun Radikal alles abgebaut und neu angeschlossen ...
Die Regler HK ss 25-30 habe ich endsogt und dann noch vorhandene Turnigy Plush 12A (noch nicht geflasht)
Verbaut.
Alles wieder angeschlossen und siehe das bis auf ein Leites schwingen beim extrem Beschleunigen flog der Kopter.
das sollte sich mit PID ändern lassen .
ingesammt machte er sich recht gut .
Ich werde wenn es nicht wieder Regnet morgen mal richtig Testen ....
2 Fragen habe ich aber dennoch .
1: der Kopter ist mir ein wenig zu Träge . Kann ich das bei der Naze mit dem Wert RC Expo die agilität rauf setzen und wie viel,.
Dann habe ich das Problem das ich nicht mehr weiß wie ich das Standgas für dem
Motoren einschalter einstellen kann .....denn jetzt ist es so das die Motoren erst ab 1/4 Gas drehen ....
Danke für eure Hilfe und die Bemühugen.
Habe bestimmt noch mehr fragen .
Alex
Damit auch Ihr ein schönen Feiertag habt ......
Ich habe nun Radikal alles abgebaut und neu angeschlossen ...
Die Regler HK ss 25-30 habe ich endsogt und dann noch vorhandene Turnigy Plush 12A (noch nicht geflasht)
Verbaut.
Alles wieder angeschlossen und siehe das bis auf ein Leites schwingen beim extrem Beschleunigen flog der Kopter.
das sollte sich mit PID ändern lassen .
ingesammt machte er sich recht gut .
Ich werde wenn es nicht wieder Regnet morgen mal richtig Testen ....
2 Fragen habe ich aber dennoch .
1: der Kopter ist mir ein wenig zu Träge . Kann ich das bei der Naze mit dem Wert RC Expo die agilität rauf setzen und wie viel,.
Dann habe ich das Problem das ich nicht mehr weiß wie ich das Standgas für dem
Motoren einschalter einstellen kann .....denn jetzt ist es so das die Motoren erst ab 1/4 Gas drehen ....
Danke für eure Hilfe und die Bemühugen.
Habe bestimmt noch mehr fragen .
Alex
@cimorra
Damit wollte ich sagen, dass ein vollständig starres Frame zumindest theoretisch, überall gleich stark schwingen kann. Zum Beispiel bei einem Heli übertragen sich die Schwingungen einer schlechten Heckrotorwelle/ schlecht gewuchteten Heckrotorblätter über den Ausleger bis zum Chassis, auf welchem das Flybarlesssystem ist. Dieses wiederum wird meist auf unterschiedlich harten Schaumstoffen gelagert, die eine weitere Übertragung der Schwingungen auf das System weitgehend verhindern sollen.
Damit wollte ich sagen, dass ein vollständig starres Frame zumindest theoretisch, überall gleich stark schwingen kann. Zum Beispiel bei einem Heli übertragen sich die Schwingungen einer schlechten Heckrotorwelle/ schlecht gewuchteten Heckrotorblätter über den Ausleger bis zum Chassis, auf welchem das Flybarlesssystem ist. Dieses wiederum wird meist auf unterschiedlich harten Schaumstoffen gelagert, die eine weitere Übertragung der Schwingungen auf das System weitgehend verhindern sollen.
... was mir jetzt auch noch in den sinn kommt:
drüben im MK form gibt es ja auch eine menge piloten die den rahmen fliegen.
http://forum.mikrokopter.de/topic-38424.html
vielleicht magst du da auch noch mal nachfragen ob der eine oder andere
a) tips und infos hätte
b) in deiner nähe ist zum gemeinsamen live fehlersuchen
happy landings,
der skyfreak
drüben im MK form gibt es ja auch eine menge piloten die den rahmen fliegen.
http://forum.mikrokopter.de/topic-38424.html
vielleicht magst du da auch noch mal nachfragen ob der eine oder andere
a) tips und infos hätte
b) in deiner nähe ist zum gemeinsamen live fehlersuchen
happy landings,
der skyfreak
") - Wieder lebendig - OT: Mail mit Konfi wolltest mir (Okto-Michl) doch schicken? Bussi!
- Wieder lebendig - OT: Mail mit Konfi wolltest mir (Okto-Michl) doch schicken? Bussi!Hallo Cimorra,
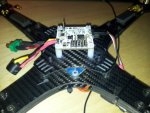
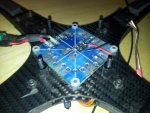
beim betrachten Deiner Baubilder habe ich das Gefühl Du hast Dir einen kleinen Kunstoffresonanzturm gebaut.
Meiner Meinung nach hat die NAZE da oben nichts zu suchen.
Die 6050 MPU mag es gern hart - wird auch in diesem Forum immer wieder geschrieben, d.h. direkt auf den Frame und nicht mit mehreren Kunststoffelementen auf einen Turm.
Teste doch mal die NAZE direkt auf die obere Centerplate zu schrauben - Stahlschraube von unten durch die Centerplate M3 Mutter von oben drauf, NAZE und mit Stahlmutter befestigen. Deinen Stromverteiler kannst Du ja für erste Tests mit ausreichendem Abstand oben drüber schrauben.
Waren die SS25/30 mit SimonK oder noch Original? Die Plushis dürften ein langsameres Ansprechverhalten haben - daher wahrscheinlich kein Aufschwingen/Vibrieren Regelung NAZE / ESC´s / Motoren / Türmchen.?.
Ich fliege eine Rachel - das ist ein Karbonrahmen mit 35cm vom Tilmann (ähnlich Deinem) mit Roxxy´s, 8" GEM´s, 12A SimonK´s vom TC und einer AcroNAZE mit Harakiri 4C Firmware mit Sandartparametern.
Mein Aufbau ist Stahlschraube durch die Centerplate und oben M3 Stahlmutter, Stromverteiler vom TC(Größe wir NAZE), M3 Stahlmutter, Delringehäuse vom TC(etwas modifiziert für gewinkelte ESC Anschlüsse) mit AcroNAZE und selbst sichernder Stahlmutter.
Den Copter schüttelt es Mal bei einem schnellen Abstieg aber sonst nicht.
Eventuell magst Du ja mal meinen Vorschlag testen.
Viele Grüße
jörg
beim betrachten Deiner Baubilder habe ich das Gefühl Du hast Dir einen kleinen Kunstoffresonanzturm gebaut.
Meiner Meinung nach hat die NAZE da oben nichts zu suchen.
Die 6050 MPU mag es gern hart - wird auch in diesem Forum immer wieder geschrieben, d.h. direkt auf den Frame und nicht mit mehreren Kunststoffelementen auf einen Turm.
Teste doch mal die NAZE direkt auf die obere Centerplate zu schrauben - Stahlschraube von unten durch die Centerplate M3 Mutter von oben drauf, NAZE und mit Stahlmutter befestigen. Deinen Stromverteiler kannst Du ja für erste Tests mit ausreichendem Abstand oben drüber schrauben.
Waren die SS25/30 mit SimonK oder noch Original? Die Plushis dürften ein langsameres Ansprechverhalten haben - daher wahrscheinlich kein Aufschwingen/Vibrieren Regelung NAZE / ESC´s / Motoren / Türmchen.?.
Ich fliege eine Rachel - das ist ein Karbonrahmen mit 35cm vom Tilmann (ähnlich Deinem) mit Roxxy´s, 8" GEM´s, 12A SimonK´s vom TC und einer AcroNAZE mit Harakiri 4C Firmware mit Sandartparametern.
Mein Aufbau ist Stahlschraube durch die Centerplate und oben M3 Stahlmutter, Stromverteiler vom TC(Größe wir NAZE), M3 Stahlmutter, Delringehäuse vom TC(etwas modifiziert für gewinkelte ESC Anschlüsse) mit AcroNAZE und selbst sichernder Stahlmutter.
Den Copter schüttelt es Mal bei einem schnellen Abstieg aber sonst nicht.
Eventuell magst Du ja mal meinen Vorschlag testen.
Viele Grüße
jörg
Hallo Jörg,
schütteln sollte bei Dir auch bei harten Abfangmanövern nach freie Stürzen nichts. Probier mal ACC_HW auf 2, wenn Du es nicht schon hast. Ebenso hilft eine Looptime von 3500. Wenn der Copter trotzdem beim Abfangen noch schüttelt, ist die Stahlverschraubung der FC doch etwas zu hart gewählt.
schütteln sollte bei Dir auch bei harten Abfangmanövern nach freie Stürzen nichts. Probier mal ACC_HW auf 2, wenn Du es nicht schon hast. Ebenso hilft eine Looptime von 3500. Wenn der Copter trotzdem beim Abfangen noch schüttelt, ist die Stahlverschraubung der FC doch etwas zu hart gewählt.
Hallo Tilman,
so wild ist das nicht. Eventuell ist mein Gas auch nur zu niedrig gewesen so das die Regelung nicht mehr griff. Da kann man ja in der Mixer.c etwas ändern wie anderswo nachzulesen ist.
Heute habe ich bewusst mal den Gasstick nicht vollständig auf Null da war nichts mit schütteln.
In der Harakiri ist standardmäßig der 6050 aktiv bzw der Parameter mit 2 vorbesetzt.
Aber lieber Stahlverschraubung wie Kunststoffpagode
Viele Grüße
Jörg
Noch ein Nachtrag: Ich hatte heute mal meinen ESC Flashtag und auch ein paar HK SS15/18 auf SimonK geflasht. Erstmal eh nur 8kHz und einer hatte beim Testlauf auch ein Stottern beim Hochdrehen bis zum Stillstand das kann dann auch einen schönen Flip geben. Der ist dann gleich mal in Sondermüll gewandert. Naja SuperSimple halt.
so wild ist das nicht. Eventuell ist mein Gas auch nur zu niedrig gewesen so das die Regelung nicht mehr griff. Da kann man ja in der Mixer.c etwas ändern wie anderswo nachzulesen ist.
Heute habe ich bewusst mal den Gasstick nicht vollständig auf Null da war nichts mit schütteln.
In der Harakiri ist standardmäßig der 6050 aktiv bzw der Parameter mit 2 vorbesetzt.
Aber lieber Stahlverschraubung wie Kunststoffpagode
Viele Grüße
Jörg
Noch ein Nachtrag: Ich hatte heute mal meinen ESC Flashtag und auch ein paar HK SS15/18 auf SimonK geflasht. Erstmal eh nur 8kHz und einer hatte beim Testlauf auch ein Stottern beim Hochdrehen bis zum Stillstand das kann dann auch einen schönen Flip geben. Der ist dann gleich mal in Sondermüll gewandert. Naja SuperSimple halt.
Zuletzt bearbeitet:
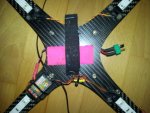
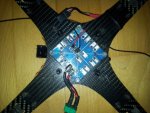
Dreh halt die ESC Versorgungsleitungen zusammen mit den Lipo Anschlüssen verlöte sie und mach Schrumpfschlauch drauf und lass sie zwischen den Centerplates raus kommen. Für die Befestigung mit Kabelbindern sind doch Schlitze vorhanden.
Schau mal auf Tilman´s Seite da findest Du etwas über den Rachel Aufbau, da kannst Du Dir das ab schauen.
vg jörg
Schau mal auf Tilman´s Seite da findest Du etwas über den Rachel Aufbau, da kannst Du Dir das ab schauen.
vg jörg
- Status
- Nicht offen für weitere Antworten.

