
4ESC by Martinez max. 6S
- Themenstarter martinez
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
der Teufel meist im Detail: Motoren werden in bestimmten Konfigurationen nicht mehr ordentlich kommutiert, sinnfreie C/R Kombis zwischen CPU & FET begrenzen die Dynamik, der PWM Teil strahlt wie eine Mikrowelle, das Teil verabschiedet sich im Teillastbereich mit einem schicken Blitz und einem Wölkchen oder die Firmware ist praktisch nicht zu ändern, da die Beschaltung der CPU das nicht zulässt usw. usw.
Wem also bei den letzten Eigenschaften etwas einfällt, der möge seinen Senf dazugeben")
Wem also bei den letzten Eigenschaften etwas einfällt, der möge seinen Senf dazugeben
Sicherlich hast Du recht, das es einige gibt, auf denen sinnfreie Kondensatoren/Widerstände drauf sind.
Auf der anderen Seite ist es die Software, deshalb ist die SimonK ja so populär.
Und um die Probleme mit einigen Motoren in den Griff zu bekommen, kann man ja auch bei SimonK einiges ändern. Auch in der Entwicklung in der Grossfliegerei kommt man einfach nicht um praktische Experimente umher.
Sicherlich muss hier der Weg über die Neu-Kompilierung und anschliessendes Flashen gegangen werden; dieses ist bei ESC mit 32bit-MCU schöner gelöst.
Auch kann man die SimonK an seine eigenen Beschaltung des ATmega8 anpassen, jedoch muss darauf geachtet werden, dass nicht alle Ports beim ATmega8 z.B. ADC können und auch der INT0 darf nicht verändert werden.
Ich hatte noch nie Probleme mit Teillast. Lassen sich Deine Probleme da reproduzieren? Dies bitte als PN oder in einen neuen Thread, da dies hier ziemlich Off-Topic wäre.
Sven
Zuletzt bearbeitet:
"Strahlt wie eine Microwelle" oder starke erwärmung im Teillast Bereich kenne ich auch.
Auch mit meinen Quad reglern.
Der Fehler lieg eigentlich immer an falscher Kondensator Dimensionierung/Auswahl, schlechter Stromführung und falschen Steuerzeiten oder unpassenden Motoren, je nachdem wie man es sieht
Mit der Entscheidung die V3 als Multilayer zu machen ist Martinez schon einmal in die "richtige" Richtung gegangen...
Nun schauen wir doch einfach mal was wir aus dem Regler raus holen können...
Bewertet, wird dann später LOL
PS:
Ganz klar, wenn alles kalt bleibt und der Kopter mit einem Kilo Payload noch 30 Minuten fliegt ist man auf dem richtigen Weg
Auch mit meinen Quad reglern.
Der Fehler lieg eigentlich immer an falscher Kondensator Dimensionierung/Auswahl, schlechter Stromführung und falschen Steuerzeiten oder unpassenden Motoren, je nachdem wie man es sieht
Mit der Entscheidung die V3 als Multilayer zu machen ist Martinez schon einmal in die "richtige" Richtung gegangen...
Nun schauen wir doch einfach mal was wir aus dem Regler raus holen können...
Bewertet, wird dann später LOL
PS:
Nach welchen Kriterien kann man eigentlich die Leistung/ Güte eines ESCs bewerten?
Zuletzt bearbeitet:
Firmware upload über PPM
Und ich hab´s gerade live und in farbe gemacht
(edit: es ist keine Modifikation nötig)
Ti**** auf den Tisch ähh Thread!
Das funktioniert zu 100%!
USB Linker dran an den Rechner, ggf. Treiber laden und installieren, dran an den PPM (4ESC mit Strom versorgen, zur Sicherheit kann man den +5V Pin vom USB Linker weg lassen) und z.B. mit den kkMulticopter Flashtool entsprechend dem Bild einstellen und flashen.

Fertig!
Gruß
Martinez
Auf Reglern wo der Pin 30 und 32 nicht verbunden ist?
Das wäre mir neu.
Und ich flash schon Bootloader, da hat Hobbyking noch Mystery Regler vertickt die man umfädeln musste
Kenne nur den "hagen Bootloader" Da geht das nicht.
Erkläre das mal bitte genauer, hört sich nämlich interessant an!
Edit:
Hab grad gegoogelt...
Das das geht wussten wohl nicht mal die Entwickler
https://github.com/c---/ArduinoUSBLinker
Todo:
* connecting the servo signal wire to PD2/INT0
Das wäre mir neu.
Und ich flash schon Bootloader, da hat Hobbyking noch Mystery Regler vertickt die man umfädeln musste
Kenne nur den "hagen Bootloader" Da geht das nicht.
Erkläre das mal bitte genauer, hört sich nämlich interessant an!
Edit:
Hab grad gegoogelt...
Das das geht wussten wohl nicht mal die Entwickler
https://github.com/c---/ArduinoUSBLinker
Todo:
* connecting the servo signal wire to PD2/INT0
Und ich hab´s gerade live und in farbe gemacht
(edit: es ist keine Modifikation nötig)
Ti**** auf den Tisch ähh Thread!
Das funktioniert zu 100%!
USB Linker dran an den Rechner, ggf. Treiber laden und installieren, dran an den PPM (4ESC mit Strom versorgen, zur Sicherheit kann man den +5V Pin vom USB Linker weg lassen) und z.B. mit den kkMulticopter Flashtool entsprechend dem Bild einstellen und flashen.
Fertig!
Gruß
Martinez
Zuletzt bearbeitet:
Was hast du gemacht? Die beiden pinns verbunden?
Oder die V3 ohne Modifikation mit dem usb linker geflasht?
Du flashst dann den simonk bootloader, den wo man nur im sorce aktivieren muss, oder?
Also nicht den hagen extra?
(Ich glaube ich muss mich auch mal von hagen verabschieden )
Oder die V3 ohne Modifikation mit dem usb linker geflasht?
Du flashst dann den simonk bootloader, den wo man nur im sorce aktivieren muss, oder?
Also nicht den hagen extra?
(Ich glaube ich muss mich auch mal von hagen verabschieden
)
Zuletzt bearbeitet:
Eigentlich ist der Bootloader schon standardmässig in der tgy.asm aktiviert und braucht im *.inc nicht gesondert definiert werden
Weil ich ja bei Uart Quad-Regler immer alle Regler zusammen an einem Pin habe und damit dann auch alle flashen konnte.
Weis einer zufällig, wie man sich so einen USB-Linker Dongel beschalten muss?
Mein Jetziger Dongel erkennt den Regler nicht.
Oder muss ich nun so ein Ding extra in HK bestellen...
Und wenn ich google finde ich mehr "US Blinker" als "USB linker"
Ah... verstehe
Sorry für die blöde Fragerei...
Der Groschen ist gerade gefallen.
...
hatte es zuerst mit Sowas versucht, konnte ja nicht gehen

dann endlich kappiert, das das ganze mehr als nur ne Uart Schnittstelle mit Pullups ist


Und mich dann entschlossen nix mit nem arduino zu friemeln, sonder einen fertigen Dongel zu bestellen
Sorry für die blöde Fragerei...
Der Groschen ist gerade gefallen.
...
hatte es zuerst mit Sowas versucht, konnte ja nicht gehen
dann endlich kappiert, das das ganze mehr als nur ne Uart Schnittstelle mit Pullups ist
Und mich dann entschlossen nix mit nem arduino zu friemeln, sonder einen fertigen Dongel zu bestellen
Zuletzt bearbeitet:
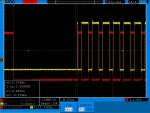
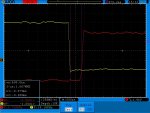
Das ist vor dem Treiber, ging ja um das komplementäre PWM.
Grüße
Martinez
Grüße
Martinez
im Source von Simon heißt das eben:
COMP_PWM = 0 ; During PWM off, switch high side on (unsafe on some boards!)
Gruß
Lutz


Ich habe einen Vorschlag zu machen:
Man könnte noch noch eine Shotky in die 5V zu dem JTS Stecker machen, dann kann man die 5V der V3 beim Stackern zusammen legen um damit die FC mit zu versorgen, die kommen mit 4.7V normalerweise auch noch gut klar.
In diesem Zusammenhang ein Hinweis:
Die SBEC einfach so zusammen klemmen bei Verwendung mehrerer V3 sollte man sich verkneifen.
Bei den Power Anschlüssen ich Zähle da 15x 0,6mm Vias Daumenwert 3.5A/Via ergibt 52A für alle 4 Regler, also 13A/Regler
(Doppelte Reserve wäre da auch nicht schlecht gewesen)
Um wirklich an die 20A/Regler zu gehen ist es sicher besser den Quadregler wirklich von beiden Seiten aus anzuschließen.
Ich vermute aber eh, das 40A Dauer insgesamt für diesen Quadregler schon ein guter Anhaltswert sind, den man auch nicht überschreiten sollte.
Ach ja, hier ist ne nette Zusammenstellung von "Daumenwerten"
http://www.fs-leiterplatten.de/technik/layout-tipps/elektrische-bemessungsrichtlinien/
...
So, und nun geht´s ab ans testen
(hab meine heute erhalten und sehen so Geil aus, das ich richtig f***... äm... fudelisch auf die ersten Tests damit bin... Danke!)
Man könnte noch noch eine Shotky in die 5V zu dem JTS Stecker machen, dann kann man die 5V der V3 beim Stackern zusammen legen um damit die FC mit zu versorgen, die kommen mit 4.7V normalerweise auch noch gut klar.
In diesem Zusammenhang ein Hinweis:
Die SBEC einfach so zusammen klemmen bei Verwendung mehrerer V3 sollte man sich verkneifen.
Bei den Power Anschlüssen ich Zähle da 15x 0,6mm Vias Daumenwert 3.5A/Via ergibt 52A für alle 4 Regler, also 13A/Regler
(Doppelte Reserve wäre da auch nicht schlecht gewesen)
Um wirklich an die 20A/Regler zu gehen ist es sicher besser den Quadregler wirklich von beiden Seiten aus anzuschließen.
Ich vermute aber eh, das 40A Dauer insgesamt für diesen Quadregler schon ein guter Anhaltswert sind, den man auch nicht überschreiten sollte.
Ach ja, hier ist ne nette Zusammenstellung von "Daumenwerten"
http://www.fs-leiterplatten.de/technik/layout-tipps/elektrische-bemessungsrichtlinien/
...
So, und nun geht´s ab ans testen
(hab meine heute erhalten und sehen so Geil aus, das ich richtig f***... äm... fudelisch auf die ersten Tests damit bin... Danke!)
Zuletzt bearbeitet:
- Status
- Nicht offen für weitere Antworten.

