
AUAV-X2 - Ein echter, kompat. Mini PIXHAWK aus Bulgarien!
- Themenstarter gervais
- Beginndatum
Hi,
Ich habe jetzt selber noch eine Frage:
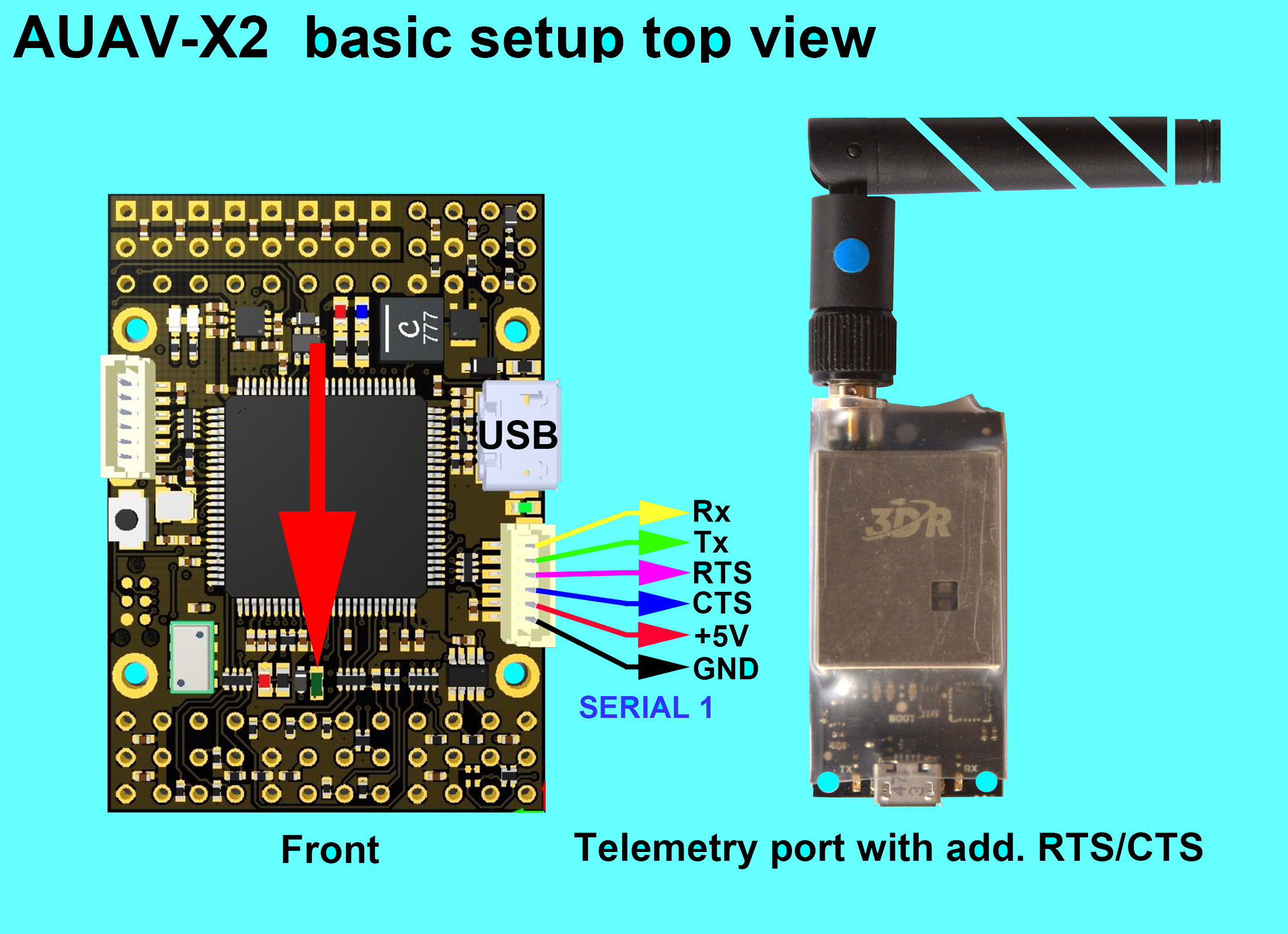
Wie schliesse ich das Telemetriemodul richtig an?
Im Startpost schliesst Gervais nur tx, rx, 5v und gnd an. Und zwar an die Frontanschlüsse, die er als "serial 2" bezeichnet.
Im Auav-x2 manual steht "NOTE! THE TELEMETRY IS ON UART2!" und als "uart2" wird der Anschluss oben auf dem Board nahe der USB-Buchse bezeichnet.
Wo soll ich nun mein 433mhz Modul anschliessen?
Zudem: Was ist mit RTS und CTS? Mein Telemetriemodul hat diese Anschlüsse auch, in Gervais Diagramm werden sie aber nicht angeschlossen.
MfG
Ich habe jetzt selber noch eine Frage:
Wie schliesse ich das Telemetriemodul richtig an?
Im Startpost schliesst Gervais nur tx, rx, 5v und gnd an. Und zwar an die Frontanschlüsse, die er als "serial 2" bezeichnet.
Im Auav-x2 manual steht "NOTE! THE TELEMETRY IS ON UART2!" und als "uart2" wird der Anschluss oben auf dem Board nahe der USB-Buchse bezeichnet.
Wo soll ich nun mein 433mhz Modul anschliessen?
Zudem: Was ist mit RTS und CTS? Mein Telemetriemodul hat diese Anschlüsse auch, in Gervais Diagramm werden sie aber nicht angeschlossen.
MfG
Zuletzt bearbeitet:
Kannst du das etwas genauer erläutern? Wie gesagt, die Verbindung geht jetzt eigentlich schon problemlos?
Frage:
Warum kriege ich den P-Wert nicht über 0.2? Auch in der Full p. List.
Frage:
Warum kriege ich den P-Wert nicht über 0.2? Auch in der Full p. List.
https://code.google.com/p/minimosd-extra/wiki/APM
Gruß
Steffen
Hi guys,
IMPORTANT NOTE!
From 7th batch and on, the AUAV-X2 will have the following modification because of the 433MHz noise issues:
1. The TPS63061 and the Inductor will not be soldered;
2. The AUAV-X2 will have a suffix q, which comes from QUIET and yes, it will be quiet;
3. The power sources allowable will be any PowrBrick - 5.3V 3DR, ACSP3 or any with 5.3-5.5VDC;
4. The backup sources allowable will be any BEC with 5-5.5VDC voltage.
Best regards
Nick
IMPORTANT NOTE!
From 7th batch and on, the AUAV-X2 will have the following modification because of the 433MHz noise issues:
1. The TPS63061 and the Inductor will not be soldered;
2. The AUAV-X2 will have a suffix q, which comes from QUIET and yes, it will be quiet;
3. The power sources allowable will be any PowrBrick - 5.3V 3DR, ACSP3 or any with 5.3-5.5VDC;
4. The backup sources allowable will be any BEC with 5-5.5VDC voltage.
Best regards
Nick
OK, it is not a serious issue, but a bit higher level of RF noise radiated from TPS63061 in the 433MHz region.
I have no feedback of whether this harms the 433MHz telemetry or receivers or not, but we ( I and Phil ) decided to go with revision "q" of the AUAV-X2 ( now AUAV-X2q ... from quiet") ) for more safety and reliability. As the X2 works just fine with either ACSP3 or 3DR PowerBrick, there will be no problem with moving to Q revision. PROs are more than CONs.
) for more safety and reliability. As the X2 works just fine with either ACSP3 or 3DR PowerBrick, there will be no problem with moving to Q revision. PROs are more than CONs.
Best regards
Nick
I have no feedback of whether this harms the 433MHz telemetry or receivers or not, but we ( I and Phil ) decided to go with revision "q" of the AUAV-X2 ( now AUAV-X2q ... from quiet
) for more safety and reliability. As the X2 works just fine with either ACSP3 or 3DR PowerBrick, there will be no problem with moving to Q revision. PROs are more than CONs.Best regards
Nick
Hi Olli,
Not so simple as desoldering of the TPS63061 is not easy as it has a large exposed pad soldered to GND. It is possible to preheat the board and destroy some surrounding components.
It is possible just for high skilled SMT persons. Anyway, if you are interesting in experimenting on your own risk, I can send you a private message with instructions how to do that.
Not so simple as desoldering of the TPS63061 is not easy as it has a large exposed pad soldered to GND. It is possible to preheat the board and destroy some surrounding components.
It is possible just for high skilled SMT persons. Anyway, if you are interesting in experimenting on your own risk, I can send you a private message with instructions how to do that.
3. The power sources allowable will be any PowrBrick - 5.3V 3DR, ACSP3 or any with 5.3-5.5VDC;
4. The backup sources allowable will be any BEC with 5-5.5VDC voltage.
4. The backup sources allowable will be any BEC with 5-5.5VDC voltage.
didnt the manual say that the power source can be anything from 4-10V ?
Or do i misinterpret your text?
a/ SERVO HEADERSS1 to S8 are the signal pins, +VS ( +VSERVO ) is the servo power supply rail, and GND is the GND rail.NOTE! Please use just one ESC/BEC for powering the servo rail with voltage between 4.5VDC and 10VDC ! Also don’t forget that the servo bus operates at 50Hz for fixed wing and 400Hz in multirotors!
b/ POWER BRICKGND, +5VBR, VOLT, CURR are respectively GND, Vcc BRICK , voltage sensing and current sensing.NOTE! VCC BRICK could be between 4.5VDC and 10VDC !Voltages from VOLTAGE and CURRENT sensing should be 3.3VDC max!
Because i wanted to use a 6V UBEC on the +5VBR Port and a Backup 5V on the Servo Rail S1
Hi Olli,
Not so simple as desoldering of the TPS63061 is not easy as it has a large exposed pad soldered to GND. It is possible to preheat the board and destroy some surrounding components.
It is possible just for high skilled SMT persons. Anyway, if you are interesting in experimenting on your own risk, I can send you a private message with instructions how to do that.
Not so simple as desoldering of the TPS63061 is not easy as it has a large exposed pad soldered to GND. It is possible to preheat the board and destroy some surrounding components.
It is possible just for high skilled SMT persons. Anyway, if you are interesting in experimenting on your own risk, I can send you a private message with instructions how to do that.
I get your point
but putting such issues aside, electronically it's what one would have to do to convert to a AUAV-X2q ?
I might try with one of my AUAV-X2's, just to compare
Ich übersetze das mal einfach.
Den AUAV-X2 in der bisherigen Variante konnte man mit 4.5-10V versorgen, dh. man konnte ihn im Gegensatz zu anderen PX Varianten ohne Regelung direkt an einen 2S Lipo hängen. (Da hatte man wohl Fläche im Kopf)
Das wurde mit einem internen Step down/ Step up (buck / boost) Regler realisiert, der je nach Eingangsspannung die Spannung auf 5V hoch oder herunter wandelt.(Schaltbild Beitrag #1)
Dieser Regler störte aber die UHF LR RC eines (!) diydrones User und da hat man sich entschieden, diesen Regler einfach weg zu lassen, da das für 99,9% der User, die ohnehin ein Powermodul mit 5.3V verwenden, völlig egal ist.
(Bis auf diejenigen, die ein GLB Schätzchen mit 8V erwischt haben,hi)
PS: Für die Zukunft bedeutet dass, das man kein 6V uBEC, sondern eins mit 5V verwendet,bzw. darauf umsteckt oder ein Powermodul, gleiches gilt für das redundante BEC (5V!).
Das direkte Anstecken einer beliebigen Spannungsquelle von 4.5-10V entfällt.
Den AUAV-X2 in der bisherigen Variante konnte man mit 4.5-10V versorgen, dh. man konnte ihn im Gegensatz zu anderen PX Varianten ohne Regelung direkt an einen 2S Lipo hängen. (Da hatte man wohl Fläche im Kopf)
Das wurde mit einem internen Step down/ Step up (buck / boost) Regler realisiert, der je nach Eingangsspannung die Spannung auf 5V hoch oder herunter wandelt.(Schaltbild Beitrag #1)
Dieser Regler störte aber die UHF LR RC eines (!) diydrones User und da hat man sich entschieden, diesen Regler einfach weg zu lassen, da das für 99,9% der User, die ohnehin ein Powermodul mit 5.3V verwenden, völlig egal ist.
(Bis auf diejenigen, die ein GLB Schätzchen mit 8V erwischt haben,hi)
PS: Für die Zukunft bedeutet dass, das man kein 6V uBEC, sondern eins mit 5V verwendet,bzw. darauf umsteckt oder ein Powermodul, gleiches gilt für das redundante BEC (5V!).
Das direkte Anstecken einer beliebigen Spannungsquelle von 4.5-10V entfällt.
Zuletzt bearbeitet:
Update bezüglich dem "Wobbeln" mit dem Loiter-Flugmodus:
Ich habe die PIDs auf die Standardwerte zurückgestellt (mit den Autotune-Werten plötzlich massives Wobbeln im Video)
- kein Wobbeln mehr im Video
Es ist mir bewusst, dass diese PIDs wahrscheinlich noch nicht die Optimalen für meinen Kopter sein werden (ist ja eine eigene Wissenschaft...) - da mein AUAV-X2 aber demnächst auf große Reise geht, habe ich keine Zeit mehr für weitere Versuche.
Zur Info die eingestellten Werte:
Rate Roll und Pitch:
P 0,15
I 0,1
D 0,04
Danke an alle für die Hinweise & Hilfe!
Udo
Ich habe die PIDs auf die Standardwerte zurückgestellt (mit den Autotune-Werten plötzlich massives Wobbeln im Video)
- kein Wobbeln mehr im Video
Es ist mir bewusst, dass diese PIDs wahrscheinlich noch nicht die Optimalen für meinen Kopter sein werden (ist ja eine eigene Wissenschaft...) - da mein AUAV-X2 aber demnächst auf große Reise geht, habe ich keine Zeit mehr für weitere Versuche.
Zur Info die eingestellten Werte:
Rate Roll und Pitch:
P 0,15
I 0,1
D 0,04
Danke an alle für die Hinweise & Hilfe!
Udo

