ich mache es nur mit dem Finger. Mit dem Monitor konnte ich bisher noch keine Virbation erkennen, bzw. wüsste ich nicht wo man dies nachschaut ...
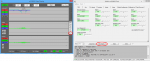
Habe mal zwei Bilddateien angehängt. Auf dem ersten Bild (Beispiel_Gut) habe ich markiert wie man in den Monitormodus kommt:
Einfach auf Data-Display klicken, dann öffnet sich das Fenster welches links zu sehen ist.
Dort ist es wichtig, dass man die Skalierung auf 1,5° einstellt, sonst ist die Auflösung zu grob und man erkennt die feinen Schwingungen nicht.
Als nächstes wählt man die Achse aus welche man einstellen möchte. In meinem Fall habe ich die Roll-Achse ausgewählt.
Ist das alles eingestellt klickt man auf "Start", nimmt den Copter und dreht ihn erst langsam, dann immer schneller um die Roll-Achse ein paar mal nach links und rechts.
Anschließend sieht man dann die entsprechenden Linien wie auf dem Bild zu sehen. Die grüne Linie in der Mitte, welche im Graph "Angles" abgebildet ist ist für den Tuningprozess am wichtigsten.
Sie zeigt die Abweichung des Gimbals vom gewünschten Winkel an. Würde die Regelung perfekt funktionieren wäre also eine gerade Linie ohne Ausreißer nach oben oder unten zu sehen. Die Realität sieht natürlich anders aus. Es sind leichte Ausreißer zu erkennen, allerdings erst in dem Bereich in dem ich den Copter schnell hin- und her gedreht habe. Mit einer Abweichung von (geschätzt) 0,2° kann ich jedoch gut leben. Davon ist im Video nichts zu erkennen.
Für das zweite Bild (Beispiel_Schlecht) habe ich die PID-Werte der Roll-Achse zum schlechten hin verändert.
Zu sehen ist, dass schon gleich zu Beginn der Aufzeichnung (Copter stand noch ruhig auf dem Tisch) Vibrationen vorhanden sind, ohne äußeren Einfluss.
Beim Bewegen um die Roll-Achse (selbe Prozedur wie weiter oben beschrieben) ist außerdem die Abweichung insgesamt größer geworden.
Man sieht auch an der unteren grünen Linie im Graph "Control" dass die Steuerung deutlich stärkere Korrekturen vornimmt. In dem Fall zu stark, sodass sich das Ganze aufschwingt.
P.S.:
Die PID-Werte die auf dem Bild "Beispiel_Gut" zu sehen sind sind für ein Tarot T-2D Gimbal mit GoPro 4.
Das Gimbal wurde mit einem zusätzlichen Motor noch um eine dritte Achse erweitert.