langsam... nicht das hier wieder ein lebensphilosphisches Gerücht entsteht
")
ich denke ich habe mich sehr vorsichtig bzgl den Schlussfolgerungen und deren Bedeutung in der Praxis mit ausreichend Zweifel ausgedrückt
Zweitens kommt die Geschichte dass die Hummel in der Theorie nicht fliegen dürfte NUR daher dass irgendwelche Reporter oder wer auch immer über Halbverstandenens schreiben das wieder halbverstanden weitergegeben wird, usw., ... das sind halt nette Geschichten die Jeder gerne hört und erzählt weil sie sich Jeder so ins Weltbild einpassen kann das sie/er sich bestätigt fühlt, aber bei genauer Überprüfung geht der Wahrheitsgehalt derartiger Geschichten (nahezu) immer gegen Null
.
nochmal an Alle ganz klar:
1. Ich habe nur ein eingeschränktes Verständnis darüber wie die Bilder im Detail zu erklären sind, und welche Aussagen sie über den technischen Zustand des Gimbals erlauben.
2. Welche Schlussfolgerungen dann daraus bzgl der z.B. Vidoqualität erlaubt sind ist noch völlig im Dunkeln.
Tatsächlich geht es mir genauso wie dir. Ich hatte auch zunächst gedacht dass mir die Bilder sofort sagen würden warum das Mobius-Carbon-Gimbal krotten schlecht funktioniert, das Mikrogimbal aber ziemlich super. War aber nicht so, heisst der Zusammenhang zwischen den objektiven Daten und der etwas subjektiven Bewertung mit "funktioniert super/schlecht" ist halt doch nicht augenscheinlich. Aber genau darum geht es gerade, für genügend Gimbals Daten zu sammeln um diesen Zusammenhang zu lernen.
Aber zurück zur Analyse. Sorry wenn ich da etwas erlich bin.
Das Video ist natürlich cool und zeigt die 360° Funktion schön, aber es beweist gar nichts bezüglich wie gut oder schlecht das Gimbal funktioniert, das bekämme man so auch mit nem "schlechten" Gimbal hin.
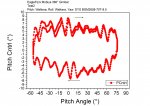
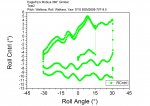
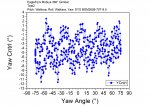
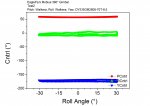
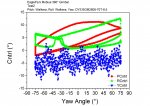
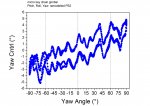
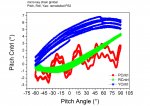
Die Daten so wie sie sind zeigen im Vergleich zu den anderen 4 Gimbals und zu dem was man sich so denken würde mehrere Auffälligkeiten. Das ist ein
Fakt, Hummel hin oder her
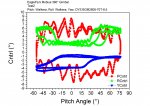
D). Diese 35° Dinger sind für mich völlig unerklärlich.
Wie gesagt, ich war über die Ergebnisse auch etwas überrascht denn auch meinem Gefühl nach, wenn man die Motoren in der Hand dreht, sind die Walkera gut. Aber das Bild ist ein anderes. D.h. entweder ist beim Aufnehmen der Daten doch noch etwas schief gegangen und zeigen ein verfälschtes Bild, oder die Walkeramotren sind i.O. aber das Gimbal hat noch verbesserungsfähige Konstruktionsdetails, oder die Walkeramotoren sind doch nicht so gut wie gedacht, oder die Messprozedur ist Unsinn und erlaubt keinerlei derartige Aussagen.
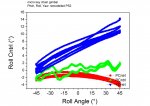
Ein bischen funktioniert es allerdings schon, z.B. hatte mein neulich zusammengebautes Mobius-Alu-Gimbal (Version Jonny
) am Anfang ganz mies funktioniert, die dann aufgenommene Roll Kurve zeigte einen einzelnen "Spike", also habe ich mir den Motor angesehen, ein Span gefunden und entfernt, und der "Spike" war weg und das Gimbal funktionierte.
Zur Reibung der Pitchachse, ich möchte da eigentlich nicht draufrumreiten, weil wenn es für dich/euch so funktioniert ist's ja gut, aber dass die Kamera im ausgeschalteten Zustand frei bewegt und der Schwerkraft folgt glaube ich Null, da sind schon die Kräfte von den Motormagneten (im Vergleich zum Kameragewicht) viel zu groß, und hält die Kamera "fest". Das ist IMHO also ein etwas sinnloser Test um die Reibung zu bewerten.
Was auch immer die richtige Bewertung der Kurven ist, spannend ist es allemal - IMHO.
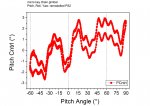
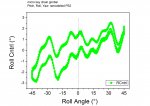
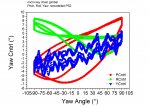
EDIT: Ich habe zum Vergleich mal die Kurven für mein Test-Keychain-Micro-Gimbal angefügt (umgewickelte PS2 Motoren) ... der Vergleich zu deinen Kurven ist schon augenfällig, denke ich, kaum Öffnung, Amplitude der Oscillationen viel kleiner, die Kurven für die jeweils "nichtangesteurten" Motren sind alle glatt, ohne Stufen etc. ...