
TragFalter - 15 Zoll Efficient Falt Kopter
- Themenstarter der-Frickler
- Beginndatum
- Status
- Nicht offen für weitere Antworten.

Ach was, das wird total überbewertet. Habe ich bei all meinen Koptern bis dato nur minimal angepasst.
Gerade bei den größeren, Trägeren Koptern wirst das kaum merken.
Gerade bei den größeren, Trägeren Koptern wirst das kaum merken.
Aber ich habe mal von kleinen 8" auf 10" Propeller gewechselt bei einem APM
und der war mit den gleichen PID dann schon akut absturzgefährdet.
Und wenn ich mir nun diese riesigen 15" Propeller ansehe...

Die Generellen PIDs müssten sicher angepasst werden, ich meinte eher den Unterschied zwischen Roll und Nick oder gar Custom Mischer bei leicht länglichen Frames.
Naza fliege ich aber auch nur auf 2 Koptern, auf allen anderen Cleanflight, vorher Multiwii und KK. Komplett falsche PID merkt man schon direkt beim Abheben, entweder is er schwammig oder man hat starkes oszillieren. Die 15" Props halten aber auch einiges aus, hatte schon beim Start und Landen Bodenberührungen auf Gras, macht denen nix.
Mit meinem bis dato einzigen APM kam ich auch nicht wirklich parat, der wollte nicht so wie ich und liegt seit dem rum.
Naza fliege ich aber auch nur auf 2 Koptern, auf allen anderen Cleanflight, vorher Multiwii und KK. Komplett falsche PID merkt man schon direkt beim Abheben, entweder is er schwammig oder man hat starkes oszillieren. Die 15" Props halten aber auch einiges aus, hatte schon beim Start und Landen Bodenberührungen auf Gras, macht denen nix.
Mit meinem bis dato einzigen APM kam ich auch nicht wirklich parat, der wollte nicht so wie ich und liegt seit dem rum.
Möchte an dieser stelle kurz mein winterprojekt vorstellen. Erstmal vielen dank an den frickler für die vielen interessanten inputs.
Mein design orientiert sich daran eine möglichst optimale platform für wifibroadcast zu bauen. Optimiert werden sollten die bereiche platzbedarf, flugdauer, video-qualität/stabilisierung und reichweite.
Die vorgaben waren wie folgt:
auw ist nun 1586g. Um das zu erreichen muss man relativ hart kämpfen, mit noch mehr aufwand wären aber sicher noch ca. 50g drinnen. Erstflug sobald das wetter besser ist.
Mein design orientiert sich daran eine möglichst optimale platform für wifibroadcast zu bauen. Optimiert werden sollten die bereiche platzbedarf, flugdauer, video-qualität/stabilisierung und reichweite.
Die vorgaben waren wie folgt:
- flugzeit ~1h
- 1:1 verhältnis frame/lipo, somit frame incl. payload max. 800g und auw<1,6kg (lipo ist der 10ah multistar)
- 5,8ghz wifibroadcast, hd downlink mit max 180ms latency und mind. 4km reichweite (3,7km getestet)
- xiaomi yi (stripped) live hdmi-out über B101 hdmi-in, odroid-w, alfa AWUS051v2 TX (raspi-cam qualität ist aus meiner sicht überhaupt nicht zufriedenstellend)
- 74 grad FOV linse (anti-fisheye) für yi, 35mbit firmware (+diverse noise/sharpener scripts)
- 3-axis diy gimbal, simplebgc 32bit tiny controller, gimbal incl. xiaomi yi hat 101g
- entkoppelte clean-plate (gummidämpfer), diese nimmt auf der unterseite sämtliche elektronik für das wifibroadcast setup auf und macht durch das gewicht des akkus eine gewisse trägheitsdämpfung. Gimbal ist dann noch extra gummi-gedämft.
- Verzicht auf hohes landing gear (gewicht, bauhöhe), gimbal/cam möglichst nahe an COG trotzdem keine props im FOV
- Sonstige ausstattung: pixhawk, ublox neo-m8, tmotor antigravity 4004-400kv, afroslim, 15x5.5 props
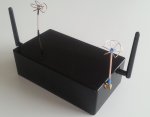
- Empfangsbox für raspberry pi/lipo/usb-hub/AP und 2x alfa AWUS052NH (dual diversity), weiterleitung hd-feed/mavlink telemetrie per 5ghz AP (anderer kanal) an android tablet oder später hdmi out (headplay hd).
- Am tablet verwende ich derzeit folgende app: http://diydrones.com/profiles/blogs/how-to-run-a-mav-link-heads-up-display-on-android-or-windows-with - funktioniert sehr gut mit wbc (relay per socat oder netcat) und hat ein super mavlink osd.
auw ist nun 1586g. Um das zu erreichen muss man relativ hart kämpfen, mit noch mehr aufwand wären aber sicher noch ca. 50g drinnen. Erstflug sobald das wetter besser ist.
Anhänge
-
 1,2 MB Aufrufe: 107
1,2 MB Aufrufe: 107 -
 991,8 KB Aufrufe: 109
991,8 KB Aufrufe: 109 -
 563,7 KB Aufrufe: 140
563,7 KB Aufrufe: 140 -
 309 KB Aufrufe: 78
309 KB Aufrufe: 78
Klasse! Da bin ich auch gespannt drauf! Da hast wirklich leicht gebaut.
Gimbal mit Xiaomi hast prima leicht hinbekommen. So was ähnliches baue ich nebenan ja auch noch, nur mit gestrippter SJ4000:
http://fpv-community.de/showthread....270g-m%F6glich&p=914424&viewfull=1#post914424
Die Xiamomi bleibt erstmal wie sie ist, dafür liegt hier schon ein neues Mini 3D Pro Gimbal für an den Tragfalter. Grübele aber noch über die Befestigung und Landegestell.
Ans Wifibroadcast muss ich mich auch noch mal rangeben, Teile liegen alle schon lange hier. OdroidW is mit Cam, neuer Optik und allem im Gopro kompatiblen Gehäuse, Raspi Zero ist komplett fertig verkabelt für an die Headplay Brille. Muss nur noch mal die neuen Images aufspielen und das ganze einfach mal draußen testen.
Zu viel Projekte, zu wenig Zeit, zu schlechtes Wetter...
Gimbal mit Xiaomi hast prima leicht hinbekommen. So was ähnliches baue ich nebenan ja auch noch, nur mit gestrippter SJ4000:
http://fpv-community.de/showthread....270g-m%F6glich&p=914424&viewfull=1#post914424
Die Xiamomi bleibt erstmal wie sie ist, dafür liegt hier schon ein neues Mini 3D Pro Gimbal für an den Tragfalter. Grübele aber noch über die Befestigung und Landegestell.
Ans Wifibroadcast muss ich mich auch noch mal rangeben, Teile liegen alle schon lange hier. OdroidW is mit Cam, neuer Optik und allem im Gopro kompatiblen Gehäuse, Raspi Zero ist komplett fertig verkabelt für an die Headplay Brille. Muss nur noch mal die neuen Images aufspielen und das ganze einfach mal draußen testen.
Zu viel Projekte, zu wenig Zeit, zu schlechtes Wetter...
bin von deinem 270g projekt begeistert - super challenge!
Habe bevor der B101 (HDMI in) verfügbar war den vorgängercopter mit einer logitech c920 als cam/2-achs gimbal und wifibroadcast geflogen. Damit könntest du noch wesentlich leichter bauen. Die cam hat gestrippt nur 10g und liefert gute full-hd quali direkt h264 encoded über usb (latency minimal höher im vergleich zur raspi-cam). Gimbal frame wiegt mit dem von mir verwendeten Rohacell/0,22mm carbon sandwichplatte ca. 5g (geklebt, ohne gummidämpfer). Motoren (2-achs) dann noch 37g. Dann hast du ein gimbal mit cam für 1080p wbc um 47g (ohne gimbal controller).
Für wbc-tx kannst du dann den raspi-zero (9g) verwenden da du kein CSI brauchst, dann noch ein mirco-usb-hub (2g). Wifi-card ist leider nicht einfach, die alfas haben eine sehr gute reichweite sind aber relativ schwer (23g). Alternativ also den TL-WN722N mit 2,3ghz (~15g mit antenne).
Insgesamt also ca. 100g für das komplette setup, immer noch viel payload für 270g auw, aber immerhin
Habe bevor der B101 (HDMI in) verfügbar war den vorgängercopter mit einer logitech c920 als cam/2-achs gimbal und wifibroadcast geflogen. Damit könntest du noch wesentlich leichter bauen. Die cam hat gestrippt nur 10g und liefert gute full-hd quali direkt h264 encoded über usb (latency minimal höher im vergleich zur raspi-cam). Gimbal frame wiegt mit dem von mir verwendeten Rohacell/0,22mm carbon sandwichplatte ca. 5g (geklebt, ohne gummidämpfer). Motoren (2-achs) dann noch 37g. Dann hast du ein gimbal mit cam für 1080p wbc um 47g (ohne gimbal controller).
Für wbc-tx kannst du dann den raspi-zero (9g) verwenden da du kein CSI brauchst, dann noch ein mirco-usb-hub (2g). Wifi-card ist leider nicht einfach, die alfas haben eine sehr gute reichweite sind aber relativ schwer (23g). Alternativ also den TL-WN722N mit 2,3ghz (~15g mit antenne).
Insgesamt also ca. 100g für das komplette setup, immer noch viel payload für 270g auw, aber immerhin
Anhänge
-
 68 KB Aufrufe: 62
68 KB Aufrufe: 62
Möchte an dieser stelle kurz mein winterprojekt vorstellen. Erstmal vielen dank an den frickler für die vielen interessanten inputs.
Mein design orientiert sich daran eine möglichst optimale platform für wifibroadcast zu bauen. Optimiert werden sollten die bereiche platzbedarf, flugdauer, video-qualität/stabilisierung und reichweite.
Die vorgaben waren wie folgt:
auw ist nun 1586g. Um das zu erreichen muss man relativ hart kämpfen, mit noch mehr aufwand wären aber sicher noch ca. 50g drinnen. Erstflug sobald das wetter besser ist.
Mein design orientiert sich daran eine möglichst optimale platform für wifibroadcast zu bauen. Optimiert werden sollten die bereiche platzbedarf, flugdauer, video-qualität/stabilisierung und reichweite.
Die vorgaben waren wie folgt:
- flugzeit ~1h
- 1:1 verhältnis frame/lipo, somit frame incl. payload max. 800g und auw<1,6kg (lipo ist der 10ah multistar)
- 5,8ghz wifibroadcast, hd downlink mit max 180ms latency und mind. 4km reichweite (3,7km getestet)
- xiaomi yi (stripped) live hdmi-out über B101 hdmi-in, odroid-w, alfa AWUS051v2 TX (raspi-cam qualität ist aus meiner sicht überhaupt nicht zufriedenstellend)
- 74 grad FOV linse (anti-fisheye) für yi, 35mbit firmware (+diverse noise/sharpener scripts)
- 3-axis diy gimbal, simplebgc 32bit tiny controller, gimbal incl. xiaomi yi hat 101g
- entkoppelte clean-plate (gummidämpfer), diese nimmt auf der unterseite sämtliche elektronik für das wifibroadcast setup auf und macht durch das gewicht des akkus eine gewisse trägheitsdämpfung. Gimbal ist dann noch extra gummi-gedämft.
- Verzicht auf hohes landing gear (gewicht, bauhöhe), gimbal/cam möglichst nahe an COG trotzdem keine props im FOV
- Sonstige ausstattung: pixhawk, ublox neo-m8, tmotor antigravity 4004-400kv, afroslim, 15x5.5 props
- Empfangsbox für raspberry pi/lipo/usb-hub/AP und 2x alfa AWUS052NH (dual diversity), weiterleitung hd-feed/mavlink telemetrie per 5ghz AP (anderer kanal) an android tablet oder später hdmi out (headplay hd).
- Am tablet verwende ich derzeit folgende app: http://diydrones.com/profiles/blogs/how-to-run-a-mav-link-heads-up-display-on-android-or-windows-with - funktioniert sehr gut mit wbc (relay per socat oder netcat) und hat ein super mavlink osd.
auw ist nun 1586g. Um das zu erreichen muss man relativ hart kämpfen, mit noch mehr aufwand wären aber sicher noch ca. 50g drinnen. Erstflug sobald das wetter besser ist.
)Hallo ap103, deine Zusammenstellung der Komponenten und der Aufbau sind sehr interessant.
- Dein Abfluggewicht ist schon sehr gut und im wesentlichen der Motorenwahl -> tmotor antigravity 4004-400kv
geschuldet. Mit 52g ist dies schon eine Ansage und sehr passend die Serie antigravity zu nennen
.War mir bisher nicht bekannt. Meine wohl selektierten T Motoren wiegen noch 80g.
In der Serie gibt es aber keinen mit optimaler KV für 4S mit 15,5 Prop?
- Den wifibroadcast thread habe ich sporadisch auch immer mal mitgelesen. Ich hatte aber den Eindruck, das es
keine brauchbare Lösung im Bezug auf Kosten, Einrichtungaufwand, Gewicht, Latenz und Reichweite gibt.
Und der Überblick geht schnell verloren...
Aber 4 km sind ja nicht schlecht
- Warum hast du keinen storM32 contoller für den Gimbal genommen? Deiner ist wohl ein AlexMos tiny exemplar,
99 Euro 8()? Die G-Motoren kann ich leider nicht erkennen?
- Die xiaomi yi scheint ja nach allen Mod sehr gut zu sein. Ob man die Lens mit einem Extension Leitung
verlängern kann? ala Mobius hidden dash cam, das wäre was...
- Ist dein Frame Plate aus dem Sandwichmaterial -> 0.5mm GFK/CFK mit 3mm Schaum ala der-Frickler?
Berichte bitte weiter....
Bezüglich gewicht sollte man (wie schon viele vor mir geschrieben) möglichst alle komponenten optimieren. Mein sandwichmaterial ist ein 4mm rohacell ig31-f kern mit 0,22mm cfk schichten. Rohacell ist im vergleich zu schaum schon sehr steif, trotzdem muss man auf die geringere druckfestigkeit durch die dünnen cfk schichten aufpassen. Die antigrativity motoren sind zwar schön leicht und in einer gewissen range auch effizient (13g/w), dafür darfst du aber (bei 4s) nicht über 1,6kg auw kommen (~55% hover). Wie von ferdl schon so oft geschrieben ist ein 1:1 verhältnis von lipo/rest für langzeitflüge erstrebenswert. Dafür musst du aber wie gesagt an allen ecken und enden gewicht einsparen, also 22awg kabel, alle gehäuse strippen, möglichst keine steckverbinder, nur alu bzw. kunststoff-schrauben verwenden, wo möglich kleben anstelle von schrauben, xt30 stecker für lipo,...
Gimbal motor ist der maytech GBM1806, bezüglich controller bin ich mit dem simplebgc tiny sehr zufrieden, kann aber zu storm nichts sagen. Die linse per extension vom rest zu trennen wird die nur was bringen wenn du ohne gimbal arbeiten möchtest. Die yi hat stripped nur noch ca. 24g, das schaffen die kleinen gimbal motoren locker, noch leichtere (nicht selbst gewickelt) sind mir nicht bekannt. Ausserdem ist die stablisierung/dämpfung von sehr kleinen gewichten schwieriger.
Das schöne am design von der-frickler ist, dass trotz der verwendung von eher günstigen komponenten bei überschaubarem aufwand ein sehr gutes resultat herauskommt.
Für mich war die motivation primär einen copter zu bauen der bezüglich video qualität und reichweite mit der lightbridge konkurrieren kann, dafür aber wesentlich längere flugzeiten als phantom/inspire etc.. bietet und trotzdem kompakt bleibt.
Gimbal motor ist der maytech GBM1806, bezüglich controller bin ich mit dem simplebgc tiny sehr zufrieden, kann aber zu storm nichts sagen. Die linse per extension vom rest zu trennen wird die nur was bringen wenn du ohne gimbal arbeiten möchtest. Die yi hat stripped nur noch ca. 24g, das schaffen die kleinen gimbal motoren locker, noch leichtere (nicht selbst gewickelt) sind mir nicht bekannt. Ausserdem ist die stablisierung/dämpfung von sehr kleinen gewichten schwieriger.
Das schöne am design von der-frickler ist, dass trotz der verwendung von eher günstigen komponenten bei überschaubarem aufwand ein sehr gutes resultat herauskommt.
Für mich war die motivation primär einen copter zu bauen der bezüglich video qualität und reichweite mit der lightbridge konkurrieren kann, dafür aber wesentlich längere flugzeiten als phantom/inspire etc.. bietet und trotzdem kompakt bleibt.
Bin echt mal gespannt auf welche Flugzeit du kommst. Meiner ging ja bei bei über 2kg schon 50min mit dem Akku.
Deine Antigravity sind ja nicht gerade billig. Bin gespannt wie die laufen! Gibts da irgendwo Testdaten an 4S?
Hab gerade den Tragfalter XL mal wieder auf dem Tisch. Ist jetzt fast fertig. Habe mittlerweile gefühlte 5km Kabel drin verlegt. Bin gespannt ob das alles funktioniert und vor allem wie er später fliegt.
Deine Antigravity sind ja nicht gerade billig. Bin gespannt wie die laufen! Gibts da irgendwo Testdaten an 4S?
Hab gerade den Tragfalter XL mal wieder auf dem Tisch. Ist jetzt fast fertig. Habe mittlerweile gefühlte 5km Kabel drin verlegt. Bin gespannt ob das alles funktioniert und vor allem wie er später fliegt.
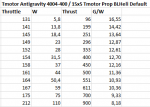
Ich habe für 4s noch keine daten gefunden, den daten von tmotor würde ich nicht vertrauen. Unten siehst du die daten von meinem turnigy thrust stand. Der motor ist generell etwas tricky und sicher nicht für jedes projekt geeignet. Wie im nachbarforum schon jemand geschrieben hat, hat der antigravity nicht das grösste drehmoment. So fliegt er mit den relativ schweren tmotor-props zwar sehr effizent, jedoch unruhiger als z.b. mit gleich großen aber deutlich leichteren tarrot props. Die sind zwar etwas weniger effizient, das gleicht sich dann aber durch das geringere auw fast wieder aus. Denke also nicht dass der motor für props >15zoll bei 4s geeignet ist.
Habe zum vergleich den mn3508-380kv getestet, der sollte ja lt. tigermotor ein effizienzmonster sein (17g/w bei 50% throttle). Konnte das aber überhaupt nicht reproduzieren. Effizienz vergleichbar mit dem antigravity, jedoch höherer max. thrust und (vermutlich) mehr drehmoment (kann ich nicht messen). Also für schwerere copter sicher gut geeignet, jedoch nicht für mein szenario.
Habe zum vergleich den mn3508-380kv getestet, der sollte ja lt. tigermotor ein effizienzmonster sein (17g/w bei 50% throttle). Konnte das aber überhaupt nicht reproduzieren. Effizienz vergleichbar mit dem antigravity, jedoch höherer max. thrust und (vermutlich) mehr drehmoment (kann ich nicht messen). Also für schwerere copter sicher gut geeignet, jedoch nicht für mein szenario.
Anhänge
-
 10,3 KB Aufrufe: 48
10,3 KB Aufrufe: 48
Wollte nur mitteilen dass Hobbyking wieder Lipos im Angebot hat, 4s 10000mah für 28€, 4s 16000mah für 47€ etc:
http://www.hobbyking.com/hobbyking/...=NL&idCategory=1388&v=&sortlist=F&LiPoConfig=
http://www.hobbyking.com/hobbyking/...=NL&idCategory=1388&v=&sortlist=F&LiPoConfig=
Hallo Frickler,
in deinem Ersten Beitrag hier hast du geschrieben das du in BlHeli das "Dampening Off" gestellt hast. Wo findet man dieses?
In meinen Einstellungen finde ich nur "PWM Frequency/Damped", welches was mit Dämpfung zu tun hat. Dieses kann man jedoch nicht aus stellen.
BLHeli14.4
RcTimer 5010 360
Gruß ChilloutNobody
in deinem Ersten Beitrag hier hast du geschrieben das du in BlHeli das "Dampening Off" gestellt hast. Wo findet man dieses?
In meinen Einstellungen finde ich nur "PWM Frequency/Damped", welches was mit Dämpfung zu tun hat. Dieses kann man jedoch nicht aus stellen.
BLHeli14.4
RcTimer 5010 360
Gruß ChilloutNobody
Hallo Frickler,
in deinem Ersten Beitrag hier hast du geschrieben das du in BlHeli das "Dampening Off" gestellt hast. Wo findet man dieses?
In meinen Einstellungen finde ich nur "PWM Frequency/Damped", welches was mit Dämpfung zu tun hat. Dieses kann man jedoch nicht aus stellen.
BLHeli14.4
RcTimer 5010 360
Gruß ChilloutNobody
in deinem Ersten Beitrag hier hast du geschrieben das du in BlHeli das "Dampening Off" gestellt hast. Wo findet man dieses?
In meinen Einstellungen finde ich nur "PWM Frequency/Damped", welches was mit Dämpfung zu tun hat. Dieses kann man jedoch nicht aus stellen.
BLHeli14.4
RcTimer 5010 360
Gruß ChilloutNobody

So, der Tragfalter XL ist QUASI fertig. Komplette Verkabelung X mal gecheckt, aber nicht dran gedacht das ich vor Wochen die Motoren und Regler zwar schon eingebaut, aber nocht nicht auf Drehrichtung getestet hatte.
Naza im Atti mit beherzt Gas gestartet, Hinten kommt Schub, vorne Sog ;-)
Vorne neue Props fällig. Waren zum Glück nur die billigen 17" DJI Falt Clone und die gibts recht fix neu aus DE.
Naza im Atti mit beherzt Gas gestartet, Hinten kommt Schub, vorne Sog ;-)
Vorne neue Props fällig. Waren zum Glück nur die billigen 17" DJI Falt Clone und die gibts recht fix neu aus DE.
Wollte nur mitteilen dass Hobbyking wieder Lipos im Angebot hat, 4s 10000mah für 28€, 4s 16000mah für 47€ etc:
http://www.hobbyking.com/hobbyking/...=NL&idCategory=1388&v=&sortlist=F&LiPoConfig=
http://www.hobbyking.com/hobbyking/...=NL&idCategory=1388&v=&sortlist=F&LiPoConfig=
So, der Tragfalter XL ist QUASI fertig. Komplette Verkabelung X mal gecheckt, aber nicht dran gedacht das ich vor Wochen die Motoren und Regler zwar schon eingebaut, aber nocht nicht auf Drehrichtung getestet hatte.
Naza im Atti mit beherzt Gas gestartet, Hinten kommt Schub, vorne Sog ;-)
Vorne neue Props fällig. Waren zum Glück nur die billigen 17" DJI Falt Clone und die gibts recht fix neu aus DE.
Naza im Atti mit beherzt Gas gestartet, Hinten kommt Schub, vorne Sog ;-)
Vorne neue Props fällig. Waren zum Glück nur die billigen 17" DJI Falt Clone und die gibts recht fix neu aus DE.
- Status
- Nicht offen für weitere Antworten.

