
Aerodynamik für RaceCopter
- Themenstarter maulwurfpauli
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Ja, klar kein Problem. Wurde jetzt schon zig mal per PN angeschrieben, daher hier jetzt mal direkt:
Hier der Link zur DXF:
https://www.dropbox.com/s/801q7w94xbe8uj2/warpquad_fpv_pod.rar?dl=0
Und hier der Link zum rcgroups Thread:
http://www.rcgroups.com/forums/showthread.php?t=2176239&page=712
Und noch ein paar Fotos:



Hier der Link zur DXF:
https://www.dropbox.com/s/801q7w94xbe8uj2/warpquad_fpv_pod.rar?dl=0
Und hier der Link zum rcgroups Thread:
http://www.rcgroups.com/forums/showthread.php?t=2176239&page=712
Und noch ein paar Fotos:
Zuletzt bearbeitet:
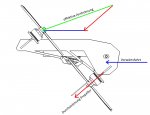
kannst du von deinem entwurf bitte mal eine geneigte frontansicht zeigen damit man die größe der widerstandsfläche einschätzen kann.

Auch wenn ich denke, dass der Formfaktor eher eine größere Rolle spielt als die Fläche. In der Widerstandsformel sind zwar beide gleichwertig vertreten, aber die Fläche kann ich nur sehr begrenzt in ihrer Größe verändern, während beim CW-Wert von einer Schrankwand (CW >1) bis zu der Tropfenform (CW < 0.05) zumindest theoretisch viel machbar ist.
Außerdem gilt zu bedenken dass die Anströmung unter den Props nicht direkt von vorne kommt sondern eine Addition der Vektoren von Durchströmung und Vorwärtsgeschwindigkeit ist.
Je mehr ich hier aber die einfachen X-Quads mit Aufbauten sehe denke ich, dass das die bessere Lösung ist.
Werd ihn trotzdem bauen und vielleicht damit auf die Nase fallen ... Versuch macht Kluch
")
wow, die frontansicht schaut ja super kompakt aus. so optimal hätte ich das gar nicht vermutet...
das geht mir gerade genau so, der fehlende schutz für fpv-cam und -sender würde mich aber sehr stören und jeder dem schonmal die antennenbuchse vom vtx abgebrochen ist weis was ich meine...
viele grüße, gerald.
...Je mehr ich hier aber die einfachen X-Quads mit Aufbauten sehe denke ich, dass das die bessere Lösung ist...
viele grüße, gerald.
Ja, klar kein Problem. Wurde jetzt schon zig mal per PN angeschrieben, daher hier jetzt mal direkt:
Hier der Link zur DXF:
https://www.dropbox.com/s/801q7w94xbe8uj2/warpquad_fpv_pod.rar?dl=0
Hier der Link zur DXF:
https://www.dropbox.com/s/801q7w94xbe8uj2/warpquad_fpv_pod.rar?dl=0
Wo hast Du es fräsen lasen? Weil... Du hast nicht zufällig noch 1-2 stück zuviel die Du verkaufen würdest? ;-)
Gruss!
Pablo
Ich hoffe es ist ok wenn ich das hier schreibe. Fräsen lassen hab ich es hier www.carbon-posten.de
hallo leute,
mit welchen props erreicht ihr eigentlich die höchste geschwindigkeit und/oder die besten rundenzeiten?
das thema finde ich echt noch sehr interessant und passt hier ja auch ganz gut mit rein.
ausgangspunkt sollte natürlich immer der gleiche copter mit dem selben setup sein bis auf die props... ich dachte ja immer die sache ist ganz simpel, also z.b. 5x4.5" ist schneller als 6x4.5" da durch die höhere drehzahl welche für den gleichen schub benötigt wird auch die strahlgeschwindigkeit des propellerstromes und damit auch die geschwindigkeit des copters steigt aber so einfach ist es in der praxis dann doch nicht...
hat da schon jemand ein paar erfahrungen und vergleichswerte gesammelt?
viele grüße, gerald.
mit welchen props erreicht ihr eigentlich die höchste geschwindigkeit und/oder die besten rundenzeiten?
das thema finde ich echt noch sehr interessant und passt hier ja auch ganz gut mit rein.
ausgangspunkt sollte natürlich immer der gleiche copter mit dem selben setup sein bis auf die props... ich dachte ja immer die sache ist ganz simpel, also z.b. 5x4.5" ist schneller als 6x4.5" da durch die höhere drehzahl welche für den gleichen schub benötigt wird auch die strahlgeschwindigkeit des propellerstromes und damit auch die geschwindigkeit des copters steigt aber so einfach ist es in der praxis dann doch nicht...
hat da schon jemand ein paar erfahrungen und vergleichswerte gesammelt?
viele grüße, gerald.
Meine ganz persönliche Erfahrung,selber ZMR Carbon,Tiger 2206/2000,4s,Abflugfertig 560g. : HQ 5,5x4,5 Schub aber langsam/HQ 5x4,5 BN wesentlich schneller/HQ 5x4x4 etwas langsamer als die 5x4,5 aber viel bessere beschleunigung! Im Endeffekt die schnellste Rundenzeit (wenns nicht nur im Kreis rum geht) mit den Dreiblatt! Klingt komisch,ist aber so.Vielleicht werden die deswegen bei vielen Youtubern gern in Videos verwendet.mfg.Martin
Zuletzt bearbeitet:
Mein "alternative" racer ist fertig also zumindest im Rohbau, noch nackert und ohne Verkleidung ...

Erstflug war auch schon im Garten, aber ich "sehe" den Kopter nicht richtig, kann daher auch nicht gut damit LOS fliegen (müsste erst üben). Aber mit der Kamera sollte sich (zumindest dieses) Problem lösen. Bin schon gespannt wie schnell der geht ...
https://www.youtube.com/watch?v=7mRt-xQeB2I
Bitte den Copter auch nicht als "angewandte" sondern als Grundlagenforschung interpretieren.
lg Ferdl
Erstflug war auch schon im Garten, aber ich "sehe" den Kopter nicht richtig, kann daher auch nicht gut damit LOS fliegen (müsste erst üben). Aber mit der Kamera sollte sich (zumindest dieses) Problem lösen. Bin schon gespannt wie schnell der geht ...
https://www.youtube.com/watch?v=7mRt-xQeB2I
Bitte den Copter auch nicht als "angewandte" sondern als Grundlagenforschung interpretieren.
lg Ferdl
...Bin schon gespannt wie schnell der geht... Bitte den Copter auch nicht als "angewandte" sondern als Grundlagenforschung interpretieren...
gab es dafür schon ein vorbild bzw etwas ähnliches in der art oder hast du dir das ausgedacht?
kommt die flightcontrol so ohne weiters mit den stark versetzten motorebenen aus oder muss/sollte dafür etwas eingestellt werden?
auf einen fpv- und speedflug mit dem teil bin ich ebenfalls sehr gespannt, eine nickfunktion für die fpv-cam wird bei der konstruktion allein schon wegen der landung pflicht. die sah in deinem video übrigens absolut souverän aus...
viele grüße, gerald.
ferdl, wann bekommen wir ein fpv-video von/mit deinem copter zu sehen? dein kleiner X16 hat doch nicht etwa vorrang?
mit deiner konstruktion hast du je nach motorisierung sicher ganz gute chancen auf einen neuen geschwindigkeitsrekord... wenn du den "rumpf" noch etwas als tragfläche verkleidest wirst du einem pitchwinkel von 90° vermutlich schon recht nah kommen
grüße, gerald.
mit deiner konstruktion hast du je nach motorisierung sicher ganz gute chancen auf einen neuen geschwindigkeitsrekord... wenn du den "rumpf" noch etwas als tragfläche verkleidest wirst du einem pitchwinkel von 90° vermutlich schon recht nah kommen
grüße, gerald.
@paulwurfpauli
Am racer mache ich nur was wenn der Lötkolben vom X16 gerade noch warm ist, das wird noch etwas dauern, aber der Einfachheit halber werde ich 2 cams und einen switch einbauen( das mit dem schwenken ist immer problematisch). Das mit dem kleinen Flügel war ja genau das Ziel, damit ich (fast) 90" fliegen kann. Hier werde ich mit Depron verkleiden, oder wenn es dann mal fliegt mal einen Kollegen fragen ob der da mit Balsa was zaubern kann (nur einmal Kontakt und schon ist es ...).
aber ich glaub ich hab noch einen schnelleren Kopter ...
lg Ferdl
Am racer mache ich nur was wenn der Lötkolben vom X16 gerade noch warm ist, das wird noch etwas dauern, aber der Einfachheit halber werde ich 2 cams und einen switch einbauen( das mit dem schwenken ist immer problematisch). Das mit dem kleinen Flügel war ja genau das Ziel, damit ich (fast) 90" fliegen kann. Hier werde ich mit Depron verkleiden, oder wenn es dann mal fliegt mal einen Kollegen fragen ob der da mit Balsa was zaubern kann (nur einmal Kontakt und schon ist es ...).
aber ich glaub ich hab noch einen schnelleren Kopter ...
lg Ferdl
War heute am Flugfeld mal ausprobieren, und hab das Thema tiefgründig beackert ...
Man muss ich immer denken, man steuert den "Silver Surfer"
https://www.youtube.com/watch?v=oSCuZ8GCTG0
YT hat leider teilweise den Copter (eh schon sehr klein) wegkomprimiert.
Hätte erst ein paar Tage nur so fliegen sollen, beim letzten Überflug leider das Gas zu lange stehen lassen, in der Wende nicht mehr gut gesehen -> missing in Action, muss der Pantom wieder für die Suche morgen herhalten ... und dabei hatte ich noch nichtmal annähern "Vollgas", war ein Höllengerät, das muss ich gleich nochmal bauen ...
lg Ferdl
Man muss ich immer denken, man steuert den "Silver Surfer"
https://www.youtube.com/watch?v=oSCuZ8GCTG0
YT hat leider teilweise den Copter (eh schon sehr klein) wegkomprimiert.
Hätte erst ein paar Tage nur so fliegen sollen, beim letzten Überflug leider das Gas zu lange stehen lassen, in der Wende nicht mehr gut gesehen -> missing in Action, muss der Pantom wieder für die Suche morgen herhalten ... und dabei hatte ich noch nichtmal annähern "Vollgas", war ein Höllengerät, das muss ich gleich nochmal bauen ...
lg Ferdl
Zuletzt bearbeitet:
nach dem ganzen input hier musste ich auch mal wieder etwas zeichnen und basteln. simpel und sehr leicht sollte das ganze sein und natürlich wenig widerstandsfläche bieten, wir sind ja hier schließlich im aerodynamik-thread
ein einfacher X-aufbau ist dafür ideal aber da ich mich nicht so recht mit den hohen (fpv-)aufbauten wie z.b. beim krieger anfreunden konnte sollte der aufbau minimal länglich und mit käfig werden...
die flyduino mini-cp mit integrierter stromverteilung bot sich als ausgangsbasis an und dient als obere centerplate. mit den originalen 120mm armen aus dem mini-cp set kommt man auf ca. 240mm diagonale spannweite was auch noch gut für 6,5" props passt. gewicht des frames mit den alu-armen und centerplates in 1,5mm liegt bei 79,8 gramm.
es geht aber auch noch deutlich leichter wie das letzte foto zeigt. centerplates sind identisch (bis auf die stromverteilung aber die kommt da sicher auch rein) aber da ich diesen frame mit 1804/2400 motoren und damit max. 5" props betreiben mag sind kürzere cfk-arme (3mm dick) mit 200mm diagonale spannweite verbaut.
der komplette aufbau und erstflug wird aber leiders noch ne weile dauern...
viele grüße, gerald.
ein einfacher X-aufbau ist dafür ideal aber da ich mich nicht so recht mit den hohen (fpv-)aufbauten wie z.b. beim krieger anfreunden konnte sollte der aufbau minimal länglich und mit käfig werden...
die flyduino mini-cp mit integrierter stromverteilung bot sich als ausgangsbasis an und dient als obere centerplate. mit den originalen 120mm armen aus dem mini-cp set kommt man auf ca. 240mm diagonale spannweite was auch noch gut für 6,5" props passt. gewicht des frames mit den alu-armen und centerplates in 1,5mm liegt bei 79,8 gramm.
es geht aber auch noch deutlich leichter wie das letzte foto zeigt. centerplates sind identisch (bis auf die stromverteilung aber die kommt da sicher auch rein) aber da ich diesen frame mit 1804/2400 motoren und damit max. 5" props betreiben mag sind kürzere cfk-arme (3mm dick) mit 200mm diagonale spannweite verbaut.
der komplette aufbau und erstflug wird aber leiders noch ne weile dauern...
viele grüße, gerald.
Anhänge
-
 119,5 KB Aufrufe: 72
119,5 KB Aufrufe: 72 -
 112,4 KB Aufrufe: 94
112,4 KB Aufrufe: 94 -
 127,2 KB Aufrufe: 83
127,2 KB Aufrufe: 83
- Status
- Nicht offen für weitere Antworten.

