
360° Community Antennentracker mit Schleifring - Wer macht mit?
- Themenstarter Rangarid
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Hi,
welchen Absatz meinst du? Also ein Antennenkabel nach Innen zu führen wird meiner Meinung nach nichtnotwendig sein, weil die meisten ihren Empfänger außen ran pappen, wer den Empfänger wo anders haben will, kann sich in der schrägen Deckplatte ein Loch einbringen!")
Schöne Grüße aus dem Sauerland!
Chriss
Edit: Update

Hab im zwischenboden noch ein 15mm großes Loch eingebracht, man könnte die Kabel zwar auch nach vorne führen, aber ich dachte mir, so wird es ordentlicher! Es fehlen noch zusätzliche Bolzen für den Zwischenboden...
XT60 als Akku-Anschluss ok? Würde eh einen bestimmten Bereich frei lassen, dann kann jeder seinen eigenen Anschluss einbauen! Achja, wenn die Spannung über den Schleifring gehen soll, wäre es doch sinnvoll, die 12V (3S angenommen) über den Schleifring zu schicken, oder? Weil höhere Spannung aber weniger Strom!
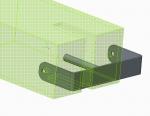
Bin am Überlegen, ob es Sinn macht, den Bügel noch ein wenig nach hinten zu verlängern, dann könnte man bei schweren Gerätschaften noch Ausgleichgewichte anbringen, um den Servo zu schonen...
Edit#2: das untere Gehäuse wird schön kompakt, dadurch kkönnte der Tilt-Bügel 70° nach unten, dazu bitte noch eine Funktion implementieren: wenn der Bügel im 70° Winkel nach unten steht, diesen Sound abspielen: https://www.youtube.com/watch?v=QITTy35CV_A
welchen Absatz meinst du? Also ein Antennenkabel nach Innen zu führen wird meiner Meinung nach nichtnotwendig sein, weil die meisten ihren Empfänger außen ran pappen, wer den Empfänger wo anders haben will, kann sich in der schrägen Deckplatte ein Loch einbringen!
Schöne Grüße aus dem Sauerland!
Chriss
Edit: Update
Hab im zwischenboden noch ein 15mm großes Loch eingebracht, man könnte die Kabel zwar auch nach vorne führen, aber ich dachte mir, so wird es ordentlicher!
Es fehlen noch zusätzliche Bolzen für den Zwischenboden...XT60 als Akku-Anschluss ok? Würde eh einen bestimmten Bereich frei lassen, dann kann jeder seinen eigenen Anschluss einbauen!
Achja, wenn die Spannung über den Schleifring gehen soll, wäre es doch sinnvoll, die 12V (3S angenommen) über den Schleifring zu schicken, oder? Weil höhere Spannung aber weniger Strom! Bin am Überlegen, ob es Sinn macht, den Bügel noch ein wenig nach hinten zu verlängern, dann könnte man bei schweren Gerätschaften noch Ausgleichgewichte anbringen, um den Servo zu schonen...
Edit#2: das untere Gehäuse wird schön kompakt, dadurch kkönnte der Tilt-Bügel 70° nach unten, dazu bitte noch eine Funktion implementieren: wenn der Bügel im 70° Winkel nach unten steht, diesen Sound abspielen: https://www.youtube.com/watch?v=QITTy35CV_A
Zuletzt bearbeitet:
dd.dddddd wird beim Lokalen GPS ausgegeben
Würde sagen wir behalten das bei, damit lässt sich gut rechnen glaub ich. Oder welches Format wäre dir am liebsten?
Steht übrigens drin:
defines.h
Ok ist mehrdeutig auslegbar. Ich mach decimal degree draus.
Ich glaub die Berechnung des Winkels von Tracker und Flugzeug ist auch falsch. Muss da mal nochmal kucken. Je nachdem mit welchen Werten es sich da am einfachsten rechnen lässt ändert sich das vielleicht nochmal.
So hab mal ne alternative Methode zur Berechnung des Winkels reingemacht. Werds dann heut abend testen.
Würde sagen wir behalten das bei, damit lässt sich gut rechnen glaub ich. Oder welches Format wäre dir am liebsten?
Steht übrigens drin:
defines.h
Code:
//coordinates in decimal format
//e.g. 52.520817 13.40945
typedef struct{
float lat;
float lon;
} geoCoordinate_t;Ich glaub die Berechnung des Winkels von Tracker und Flugzeug ist auch falsch. Muss da mal nochmal kucken. Je nachdem mit welchen Werten es sich da am einfachsten rechnen lässt ändert sich das vielleicht nochmal.
So hab mal ne alternative Methode zur Berechnung des Winkels reingemacht. Werds dann heut abend testen.
Zuletzt bearbeitet:
schau dir mal die tinygps oder tinygpsplus library an
http://arduiniana.org/libraries/tinygps/
http://arduiniana.org/libraries/tinygpsplus/
http://arduiniana.org/libraries/tinygps/
http://arduiniana.org/libraries/tinygpsplus/
Interessant, da schau ich mal rein. Das sind die zwei die wichtig sind:
Code:
double distanceKm =
TinyGPSPlus.distanceTo(
gps.location.lat(),
gps.location.lng(),
EIFFEL_TOWER_LAT,
EIFFEL_TOWER_LNG) / 1000.0;
double courseTo =
TinyGPSPlus.courseTo(
gps.location.lat(),
gps.location.lng(),
EIFFEL_TOWER_LAT,
EIFFEL_TOWER_LNG);Ok, wenn alle eh die TinyGps++ haben dann nehm ich das NMEA gedöns raus und bau die rein. Dann haben wir gleich alles aus einer Hand.
TinyGps++ benutzt übrigens Dezimalgrad. Also so wie ich es angedacht hatte. Wir müssten also alle Koordinaten die über Telemetrie reinkommen in Dezimalgrad umrechnen.
Ich hab gerade ein seltsames Problem mit meinem Multiwii, wenn ich das GPS einlese verschwinden irgendwie Datensätze. Wenn ich GGA + RMC übertrage kommt immer nur eins von beiden an und das newline fehlt auch manchmal...Jemand ne Idee? Ist sowohl bei SoftwareSerial als auch bei HardwareSerial.
Muss mal nen andern Arduino probieren, ob da das selbe Problem auftritt...
TinyGps++ benutzt übrigens Dezimalgrad. Also so wie ich es angedacht hatte. Wir müssten also alle Koordinaten die über Telemetrie reinkommen in Dezimalgrad umrechnen.
Ich hab gerade ein seltsames Problem mit meinem Multiwii, wenn ich das GPS einlese verschwinden irgendwie Datensätze. Wenn ich GGA + RMC übertrage kommt immer nur eins von beiden an und das newline fehlt auch manchmal...Jemand ne Idee? Ist sowohl bei SoftwareSerial als auch bei HardwareSerial.
Muss mal nen andern Arduino probieren, ob da das selbe Problem auftritt...
Ich mache in jedem loop
Ich hätte gedacht, ein Loop ist schneller rum, als ein Zeichen in den Buffer kommt, deshalb nur das if available(). Ist in einem der Arduino Beispiele zu SoftwareSerial genauso.
Oder meinst du es wäre besser wenn ich
mache?
Verlangsamt das die loop oder geht das so schnell, dass es egal ist?
Mir ist dabei auch noch aufgefallen, dass eich eigentlich RMC und GGA reinbekomme, aber das Newline dazwischen fehlt. Manchmal kommt eine 0. RMC und GGA sind also zusammengeklatscht in einer Zeile...
Code:
if (gpsSerial.available()){
gps.encode(gpsSerial.read());
}Oder meinst du es wäre besser wenn ich
Code:
while(gpsSerial.available() > 0){
gps.encode(gpsSerial.read());
}Verlangsamt das die loop oder geht das so schnell, dass es egal ist?
Mir ist dabei auch noch aufgefallen, dass eich eigentlich RMC und GGA reinbekomme, aber das Newline dazwischen fehlt. Manchmal kommt eine 0. RMC und GGA sind also zusammengeklatscht in einer Zeile...
Zuletzt bearbeitet:
Ich würde auf jeden Fall immer alle Zeichen lesen die im Buffer stehen, der rest kann schnell zu langsam sein. Je nachdem was du in der loop alles machst sollte die while auch mehrfach in der main loop stehen.
Newline kann ja so oder so aussehen und interpretiert werden, mal \n mal \r mal beides, evtl hast da n Fehler.
Newline kann ja so oder so aussehen und interpretiert werden, mal \n mal \r mal beides, evtl hast da n Fehler.
So also ich hab mal if und mal while probiert, macht keinen Unterschied. Hier mal die Ausgabe:
Auffällig ist, bei RMC fehlt die Checksum. Wenn ich das GPS direkt auslese ist alles ok...
Code:
$GPRMC,000229.000,V,,,,,,$GPGGA,000229.199,,,,,0,0,,,M,,M,,*40
$GPRMC,000229.199,V,,,,,0$GPGGA,000229.400,,,,,0,0,,,M,,M,,*45
$GPRMC,000229.400,V,,,,,$GPGGA,000229.599,,,,,0,0,,,M,,M,,*44
$GPRMC,000229.599,V,,,,,.$GPGGA,000229.800,,,,,0,0,,,M,,M,,*49
$GPRMC,000229.800,V,,,,,$GPGGA,000230.000,,,,,0,0,,,M,,M,,*49
$GPRMC,000230.000,V,,,,,0$GPGGA,000230.199,,,,,0,0,,,M,,M,,*48
$GPRMC,000230.199,V,,,,,$GPGGA,000230.400,,,,,0,0,,,M,,M,,*4D
Zuletzt bearbeitet:
Kommt direkt aus dem GPS. Ich mach quasi ne 1:1 Kopie vom SoftwareSerial auf den HardwareSerial und schau mir das an der Arduino Konsole an. GPS direkt dran macht wie es soll 2 Zeilen und alle Daten sind da.
GPS direkt:
$GPGGA,000025.000,,,,,0,0,,,M,,M,,*4F
$GPRMC,000025.000,V,,,,,0.00,0.00,060180,,,N*45
$GPGGA,000025.200,,,,,0,0,,,M,,M,,*4D
$GPRMC,000025.200,V,,,,,0.00,0.00,060180,,,N*47
und beim Fehler:
Lese gerade, dass mehrere den Fehler haben. Scheint an SoftSerial zu liegen...
GPS direkt:
$GPGGA,000025.000,,,,,0,0,,,M,,M,,*4F
$GPRMC,000025.000,V,,,,,0.00,0.00,060180,,,N*45
$GPGGA,000025.200,,,,,0,0,,,M,,M,,*4D
$GPRMC,000025.200,V,,,,,0.00,0.00,060180,,,N*47
und beim Fehler:
Code:
#include <SoftwareSerial.h>
SoftwareSerial mySerial(8, 11); // RX, TX
void setup()
{
Serial.begin(38400);
mySerial.begin(38400);
}
void loop() // run over and over
{
if (mySerial.available()){
uint8_t c = mySerial.read();
Serial.write(c);
}
}
Zuletzt bearbeitet:
- Status
- Nicht offen für weitere Antworten.

