
3D Drucker Bastel-Workshop - wer macht mit?
- Themenstarter samella
- Beginndatum
Das ist nur was für Leute die zu faul sind, ihren Drucker richtig einzustellen 
Schaut mal hier:
http://www.pibot.com/pibot-optical-reflection-endstop-rev143.html
Besser als jede Auto Probe mit Servo und normalem Schalter...
Schaut mal hier:
http://www.pibot.com/pibot-optical-reflection-endstop-rev143.html
Besser als jede Auto Probe mit Servo und normalem Schalter...
Halex, nur ein kurzer Hinweis. Dein Halter wird in Cura deutlich zu klein platziert. Um genau zu sein ist er 4mm hoch
Der optische Sensor ist natürlich schnieke, aber ich werde auch erstmal die Servo-Methode verwenden. Später dann mal so nen Sensor ordern.
Achso und wenn ein Workshop hier in der Nähe stattfindet (Ulm/Stuttgart/München), dann bin ich der erste der zusagt
Der optische Sensor ist natürlich schnieke, aber ich werde auch erstmal die Servo-Methode verwenden. Später dann mal so nen Sensor ordern.
Achso und wenn ein Workshop hier in der Nähe stattfindet (Ulm/Stuttgart/München), dann bin ich der erste der zusagt
Gudde halex,
danke, der Fan Halter hat mir auch gefehlt, da kann man dann
alle 3er Fans an den 2er Port vom Prusa anschließen.
Ach ja, mich würde die "Aktion" mit dem automatischen leveln
des Abstandes zum Heizbett auch reizen, nur hab ich den
Arduno nicht selbst programmiert... Das hat freundlicherweise
Florian gemacht, aber wie das generell geht und was zu
beachten ist, ist mir verschlossen geblieben.
Gibt es da nen Guide, den ich mir neben der Mechanik, die
für mich kein Problem darstellt, anschauen oder reinziehen
kann? Die Infos von 3d-Proto hab ich mir schon angesehen,
doch da muss wohl in der conig des Arduno rumgebastelt
werden und da bin ich dann mangels Wissen über das WIE
momentan noch raus...
danke, der Fan Halter hat mir auch gefehlt, da kann man dann
alle 3er Fans an den 2er Port vom Prusa anschließen.
Ach ja, mich würde die "Aktion" mit dem automatischen leveln
des Abstandes zum Heizbett auch reizen, nur hab ich den
Arduno nicht selbst programmiert... Das hat freundlicherweise
Florian gemacht, aber wie das generell geht und was zu
beachten ist, ist mir verschlossen geblieben.
Gibt es da nen Guide, den ich mir neben der Mechanik, die
für mich kein Problem darstellt, anschauen oder reinziehen
kann? Die Infos von 3d-Proto hab ich mir schon angesehen,
doch da muss wohl in der conig des Arduno rumgebastelt
werden und da bin ich dann mangels Wissen über das WIE
momentan noch raus...




Halex, nur ein kurzer Hinweis. Dein Halter wird in Cura deutlich zu klein platziert. Um genau zu sein ist er 4mm hoch
Der optische Sensor ist natürlich schnieke, aber ich werde auch erstmal die Servo-Methode verwenden. Später dann mal so nen Sensor ordern.
Achso und wenn ein Workshop hier in der Nähe stattfindet (Ulm/Stuttgart/München), dann bin ich der erste der zusagt
Der optische Sensor ist natürlich schnieke, aber ich werde auch erstmal die Servo-Methode verwenden. Später dann mal so nen Sensor ordern.
Achso und wenn ein Workshop hier in der Nähe stattfindet (Ulm/Stuttgart/München), dann bin ich der erste der zusagt
Habs geändert...
Gibt es da nen Guide, den ich mir neben der Mechanik, die
für mich kein Problem darstellt, anschauen oder reinziehen
kann? Die Infos von 3d-Proto hab ich mir schon angesehen,
doch da muss wohl in der conig des Arduno rumgebastelt
werden und da bin ich dann mangels Wissen über das WIE
momentan noch raus...
für mich kein Problem darstellt, anschauen oder reinziehen
kann? Die Infos von 3d-Proto hab ich mir schon angesehen,
doch da muss wohl in der conig des Arduno rumgebastelt
werden und da bin ich dann mangels Wissen über das WIE
momentan noch raus...
Ihr habt alle die Marlin Firmware auf euren Kisten (https://github.com/MarlinFirmware/Marlin). Die Config ist überall gleich, Unterschiede gibt es lediglich aufgrund der verschiedenen Displays (gell, Sven..
).Die wichtigsten Einstellungen werden in der Configuration.h Datei vorgenommen. Schaut euch die Datei einfach mit dem Texteditor eurer Wahl an. Viele Punkte erklären sind von selbst und/oder können unverändert übernommen werden.
Interessant wird es bei allen Parametern rund um die Mechanik:
#define DEFAULT_AXIS_STEPS_PER_UNIT {80,80,4000,740}
Hier legt ihr fest, wie viele Steps der Schrittmotor vollziehen muss um die Achse um 1mm zu versetzen.
Die Reihenfolge der Achsen ist X, Y, Z und Extruder.
Wie kommen wir nun an den Wert von 80 Steps für 1mm Fahrweg für X und Y? Ausprobieren...?! Oder doch lieber berechnen
Hierbei hilft uns dieser Rechner: http://prusaprinters.org/calculator/#steppermotors
Folgende Werte tragt ihr für die Berechnung ein:
- eure Motoren drehen sich um 1.8 Grad pro Step - könnt ihr auf dem kleinen Sticker auf den Motoren ablesen
- wir habe alle Jumper unter den Stepper Treibern gesteckt. Das bedeutet, dass wir pro Step nur noch 1/16 von 1.8 Grad drehen.
- dann verwenden wir einen GT2 Zahnriemen (siehe Belt presets)
- ..und zu guter letzt hat die verwendete Riemenscheibe 20 Zähne
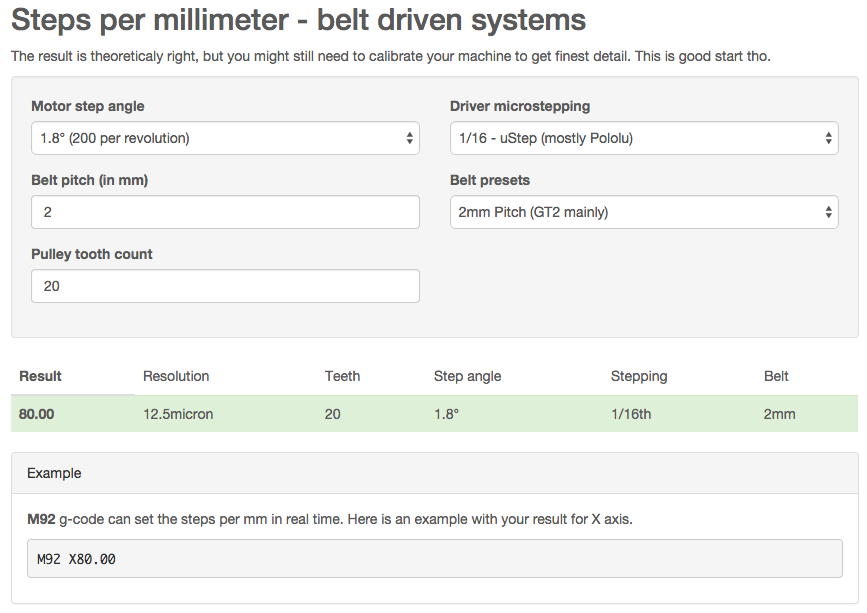
...und TATA, da ist unser Wert von 80, den wir für X und Y eintragen.
Weiter geht's mit der Berechnung der Z-Achse.
Der Prusa hat M5 Gewindestangen auf der Z-Achse. Der Rest ist wie oben:

...und der Extruder?
Die Einstellung des Extruders lässt sich leider nicht so schön berechnen - zumindest nicht 100% exakt. Die Vorgehensweise lautet hier: messen, extrudieren, messen, anpassen.
Eine sehr gute Anleitung findet ihr hier: http://reprap.org/wiki/Triffid_Hunter's_Calibration_Guide
Das ist erstmal das Wesentliche. Wollt ihr noch mehr wissen oder habt ihr spezielle Fragen?
Zuletzt bearbeitet:

