
DIY Headtracker (Easy build, No drift, OpenSource)
- Themenstarter Martin
- Beginndatum
Ich bräuchte mal euere Hilfe.....
Ich habe den headtracker gebaut,arduino Code aufgespielt und kalibriert,alles erfolgreich....
Am Anfang der Kalibrierung ändern sich wunderbar die Daten der Sensoren....
Nur in der GUI bekomme ich kein Signal,die 3 Balken unten im Live Zucken nichtmal....
Jemand ne Idee?
Ich habe den headtracker gebaut,arduino Code aufgespielt und kalibriert,alles erfolgreich....
Am Anfang der Kalibrierung ändern sich wunderbar die Daten der Sensoren....
Nur in der GUI bekomme ich kein Signal,die 3 Balken unten im Live Zucken nichtmal....
Jemand ne Idee?
Bei mir liefert der Tracker gar keine Daten.
Exakt nach anleitung nachgebaut, Sketch aufgespielt, eine zweite IMU Probiert! NIX!
Verbinden tut die GUI problemlos zum Arduino, wenn ich auf start Plot klicke kommen keine Daten rein.
SDA auf A4
SCL auf A5
GND und 5V
Board und IMU haben Strom
Screenshot von der GUI



Weiss jemand rat?
Exakt nach anleitung nachgebaut, Sketch aufgespielt, eine zweite IMU Probiert! NIX!
Verbinden tut die GUI problemlos zum Arduino, wenn ich auf start Plot klicke kommen keine Daten rein.
SDA auf A4
SCL auf A5
GND und 5V
Board und IMU haben Strom
Screenshot von der GUI
Weiss jemand rat?
Zuletzt bearbeitet:
Wenn du eine mpu6050 hast kannst du den code verwenden:
http://www.rcgroups.com/forums/showthread.php?t=2013568#post26325249
Geht auch 3-achsig.
http://www.rcgroups.com/forums/showthread.php?t=2013568#post26325249
Geht auch 3-achsig.
Hallo zusammen,
ich habe mir auch den Headtracker geholt und die neueste Version drauf geflasht.
allerdings bekomme ich nach dem Kalibrieren nicht die erwarteten Ergebnisse im Plot angezeigt (siehe Anhänge). Wenn ich es richtig verstanden habe, dürfte sich wenn ich den Headtracker nur in einer Achse bewege, auch nur eine Linie im Plot verändern.
Ich habe bis jetzt 2 IMU´s getestet, beide mit dem selben Ergebnis. Eine dritte werde ich am Montag noch ausprobieren, auch wenn ich nicht glaube, dass es eine Besserung gibt...
Vielleicht kann mir ja einer von euch weiter helfen.
Der Headtracker soll an einer DX8 angeschlossen werden, dazu gibt es hier ja auch bereits einen Thread, bei dem das aber erst noch getestet werden muss.
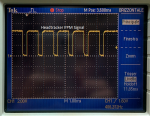
In dem Servomonitor der DX8 sehe ich auf jeden Fall nur ein zucken des ersten Kanals, welches ich mit dem Headtracker beeinflussen kann. Das PPM-Signal liefert aber auch mit dem Oscar gemessen nicht die gewünschten Daten...
Bilder im Anhang:
1. Der Plotverlauf nach einer Kalibrierung
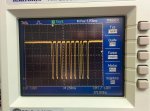
2. Der siebte Kanal verkürzte Laufzeit nach Bewegung
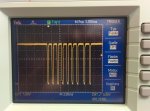
3. Der siebte Kanal verlängerte Laufzeit nach Bewegung
4. PPM-Signal meiner DX8
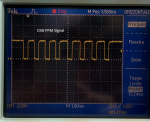
5. PPM-Signal des Headtrackers
(Bild 4 und 5 nur als Vergleich)
ich habe mir auch den Headtracker geholt und die neueste Version drauf geflasht.
allerdings bekomme ich nach dem Kalibrieren nicht die erwarteten Ergebnisse im Plot angezeigt (siehe Anhänge). Wenn ich es richtig verstanden habe, dürfte sich wenn ich den Headtracker nur in einer Achse bewege, auch nur eine Linie im Plot verändern.
Ich habe bis jetzt 2 IMU´s getestet, beide mit dem selben Ergebnis. Eine dritte werde ich am Montag noch ausprobieren, auch wenn ich nicht glaube, dass es eine Besserung gibt...
Vielleicht kann mir ja einer von euch weiter helfen.
Der Headtracker soll an einer DX8 angeschlossen werden, dazu gibt es hier ja auch bereits einen Thread, bei dem das aber erst noch getestet werden muss.
In dem Servomonitor der DX8 sehe ich auf jeden Fall nur ein zucken des ersten Kanals, welches ich mit dem Headtracker beeinflussen kann. Das PPM-Signal liefert aber auch mit dem Oscar gemessen nicht die gewünschten Daten...
Bilder im Anhang:
1. Der Plotverlauf nach einer Kalibrierung
2. Der siebte Kanal verkürzte Laufzeit nach Bewegung
3. Der siebte Kanal verlängerte Laufzeit nach Bewegung
4. PPM-Signal meiner DX8
5. PPM-Signal des Headtrackers
(Bild 4 und 5 nur als Vergleich)
Anhänge
-
 148,2 KB Aufrufe: 62
148,2 KB Aufrufe: 62 -
 625,5 KB Aufrufe: 55
625,5 KB Aufrufe: 55 -
 579,8 KB Aufrufe: 51
579,8 KB Aufrufe: 51 -
 1,2 MB Aufrufe: 47
1,2 MB Aufrufe: 47 -
 1,4 MB Aufrufe: 51
1,4 MB Aufrufe: 51
Habe so ein Teil gerade eben aufgebaut, bin begeistert - 20€ an Teilen, nicht mal ein Abend Arbeit und meine alte Fatshark RCV922 Base hat einen HT! Der gefühlt sogar weniger laggt als der von der Attitude SD. Mini-Bericht:
Verkabelung auf der Unterseite des Arduinos. Ich habe ein Stereo-Audiokabel genommen. Die weiße Litze ist das PPM-Signal, Rot ist Hauptspannung, und die beiden Schirmungen dienen jeweils als Ground-Verbindung.

GY-85 IMU oben drauf. SCL, SDA und 5V direkt über Pins verlötet, Ground mit einer kurzen Litze.

Direkt danach einen Center-Button hinzugefügt. Der ist mit einem Stückchen doppelseitiges Tape auf dem FTDI-Chip aufgeklebt. Ein Bein ist direkt am D11 Pin aufgelötet, ein anders mit einer weiteren kurzen Litze durch eines der Ecklöcher aufm Arduino-Board auf die andere Seite geführt und dort and einen der 4 Lötpunkte der USB-Buchse angebunden (dort liegt ebenfalls Ground an).

Wollte an meiner Taranis nach Möglichkeit keine Modifikationen durchführen, und habe deshalb den einzigen Ort außen drauf gefunden, wo man die Akkuspannung rausbekommt - nämlich die Pins im JR-Modulschacht. Die eine Hälfte des Stereokabels endet somit in einem normalen 3.5mm Mono-Stecker, der in die DSC Buchse verbunden wird, und die andere in einem Servostecker, der auf die JR-Modulpins aufgesteckt wird. Der Spannugsregler auf dem Arduino Nano kann 6-20V ab und funktioniert somit wunderbar mit der Hauptspannung des Taranis-Akkus.

Habe die Ecke vom Deckel des Moduschachts abgeschnitten und das Kabel dahinter geführt. So sieht's halbwegs sauber aus.

Headtracker fertig eingeschrumpft, der Center-Button freigeschnitten.

Headtracker nochmal neu eingeschrumpft (nachdem ich einen Kurzschluss an ISP-Pins mit einem Stückchen Isotape beseitigen musste, der sporadische Neustarts des Trackers verursacht hat) und auf die Fatshark mit Klett befestigt.

Bereits am Flieger mit Pan-Tilt getestet - funktioniert wunderbar! Am Wochenende kommt wohl dann ein erster Testflug, werde berichten.
Verkabelung auf der Unterseite des Arduinos. Ich habe ein Stereo-Audiokabel genommen. Die weiße Litze ist das PPM-Signal, Rot ist Hauptspannung, und die beiden Schirmungen dienen jeweils als Ground-Verbindung.
GY-85 IMU oben drauf. SCL, SDA und 5V direkt über Pins verlötet, Ground mit einer kurzen Litze.
Direkt danach einen Center-Button hinzugefügt. Der ist mit einem Stückchen doppelseitiges Tape auf dem FTDI-Chip aufgeklebt. Ein Bein ist direkt am D11 Pin aufgelötet, ein anders mit einer weiteren kurzen Litze durch eines der Ecklöcher aufm Arduino-Board auf die andere Seite geführt und dort and einen der 4 Lötpunkte der USB-Buchse angebunden (dort liegt ebenfalls Ground an).
Wollte an meiner Taranis nach Möglichkeit keine Modifikationen durchführen, und habe deshalb den einzigen Ort außen drauf gefunden, wo man die Akkuspannung rausbekommt - nämlich die Pins im JR-Modulschacht. Die eine Hälfte des Stereokabels endet somit in einem normalen 3.5mm Mono-Stecker, der in die DSC Buchse verbunden wird, und die andere in einem Servostecker, der auf die JR-Modulpins aufgesteckt wird. Der Spannugsregler auf dem Arduino Nano kann 6-20V ab und funktioniert somit wunderbar mit der Hauptspannung des Taranis-Akkus.
Habe die Ecke vom Deckel des Moduschachts abgeschnitten und das Kabel dahinter geführt. So sieht's halbwegs sauber aus.
Headtracker fertig eingeschrumpft, der Center-Button freigeschnitten.
Headtracker nochmal neu eingeschrumpft (nachdem ich einen Kurzschluss an ISP-Pins mit einem Stückchen Isotape beseitigen musste, der sporadische Neustarts des Trackers verursacht hat) und auf die Fatshark mit Klett befestigt.
Bereits am Flieger mit Pan-Tilt getestet - funktioniert wunderbar! Am Wochenende kommt wohl dann ein erster Testflug, werde berichten.
Moin, da bist du nicht allein. Habe nach mehrfachen kalibrieren endlich 2Achsen Tilt und Roll vernünftig laufen, nur die Pan Achse macht noch nicht was sie soll. Das mit dem zurückdrehen hatte ich auch erst, ist aber nach dem kalibrieren dann verschwunden. Na mal sehen ob ich die Pan Achse auch noch durch kalibrieren eingestellt bekomm.
Auch ich habe den Tracker mittlerweile zum Laufen gebracht. Einfach klasse!
Ich habe diese Komponenten bestellt und kann bestätigen, dass diese funktionieren:
http://www.ebay.de/itm/310513793857?ssPageName=STRK:MEWNX:IT&_trksid=p3984.m1497.l2649
und
http://www.ebay.de/itm/331167926635?ssPageName=STRK:MEWNX:IT&_trksid=p3984.m1497.l2649
Gesamtkosten incl. Fracht 12,45 €")
Noch etwas zum Thema Kalibrieren:
Meine ersten Versuche habe ich im Bastelkeller gemacht und dort nur unbefriedigende Ergebnisse erzielt. Achsen haben sich vermischt, bei einer Achse hatte ich bei schnelleren Bewegungen Ausschläge in die verkehrte Richtung.
Kurzum: Mit dieser Kalibrierung war kein Blumentopf zu gewinnen.
Ein erneuter Versuch, diesmal am Notebook im Wohnzimmer mit ausreichendem Abstand zu Magentfeldern und langsamen Bewegungen bei der Kalibrierung (Rotationsmethode) brachte dann das gewünschte Ergebnis. Wichtig ist dabei die Einhaltung der vorgegebenen Schritte, vor allen Dingen der Anfangsposition der IMU.
Wenn das läuft, spielt der Gainwert nur noch eine Rolle, was die synchrone Bewegung zum verwendeten Servo angeht. Ein Überschwingen oder eine Vermischung von Achsen ist nicht feststellbar.
Vielleicht habe ich dem einen oder anderen geholfen.
Gruß
Andreas
Ich habe diese Komponenten bestellt und kann bestätigen, dass diese funktionieren:
http://www.ebay.de/itm/310513793857?ssPageName=STRK:MEWNX:IT&_trksid=p3984.m1497.l2649
und
http://www.ebay.de/itm/331167926635?ssPageName=STRK:MEWNX:IT&_trksid=p3984.m1497.l2649
Gesamtkosten incl. Fracht 12,45 €
Noch etwas zum Thema Kalibrieren:
Meine ersten Versuche habe ich im Bastelkeller gemacht und dort nur unbefriedigende Ergebnisse erzielt. Achsen haben sich vermischt, bei einer Achse hatte ich bei schnelleren Bewegungen Ausschläge in die verkehrte Richtung.
Kurzum: Mit dieser Kalibrierung war kein Blumentopf zu gewinnen.
Ein erneuter Versuch, diesmal am Notebook im Wohnzimmer mit ausreichendem Abstand zu Magentfeldern und langsamen Bewegungen bei der Kalibrierung (Rotationsmethode) brachte dann das gewünschte Ergebnis. Wichtig ist dabei die Einhaltung der vorgegebenen Schritte, vor allen Dingen der Anfangsposition der IMU.
Wenn das läuft, spielt der Gainwert nur noch eine Rolle, was die synchrone Bewegung zum verwendeten Servo angeht. Ein Überschwingen oder eine Vermischung von Achsen ist nicht feststellbar.
Vielleicht habe ich dem einen oder anderen geholfen.
Gruß
Andreas
Zuletzt bearbeitet:
Da hatte ich zum Glück noch kein Problem gehabt. Selbst mit UHF Antenne neben der Birne hatte der Tracker noch keine Probleme.
Der "Center/Push Button" nennt sich in Deutschland Microtaster und in den englischen Regionen Tactile Switch. Da dürfte man also sicher einen finden. Ganz gut sind die beleuchteten, da findet man die Brille dann auch schneller beim Nachtflug
Der "Center/Push Button" nennt sich in Deutschland Microtaster und in den englischen Regionen Tactile Switch. Da dürfte man also sicher einen finden. Ganz gut sind die beleuchteten, da findet man die Brille dann auch schneller beim Nachtflug
Magnetfelder scheinen ein Thema zu sein. Halte den Tracker mal auf einen Servo und schau, was er macht.
Ich hatte das gemacht, um einen sauberen Winkelabgleich zu erzielen, und schon fing er an zu tanzen. 10cm darüber ist alles i.O..
Mir geht es darum, das niemand frustriert das Ding in die Ecke wirft, weil er zum 20sten Mal eine Kalibrierung am gleichen Platz mit dem gleichen schlechten Ergebnis gemacht hat.
Change location!
Andreas
Ich hatte das gemacht, um einen sauberen Winkelabgleich zu erzielen, und schon fing er an zu tanzen. 10cm darüber ist alles i.O..
Mir geht es darum, das niemand frustriert das Ding in die Ecke wirft, weil er zum 20sten Mal eine Kalibrierung am gleichen Platz mit dem gleichen schlechten Ergebnis gemacht hat.
Change location!
Andreas

