
Eigenbau Tracker mit Downlink über den Audiokanal
- Themenstarter QuadMax
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Hi, ich habe ganz billige Servos vom Hobbyking.
Schau mal in den 2. Post in diesem Thread, da habe ich alle Teile verlinkt, die ich benutzt habe.
Sobald das Wetter mitspielt, gibt es ein Video. Das ist glaube ich wesentlich anschaulicher, als das jetzt alles zu erklären.
Habe den Empfänger in der Mitte, sodass es maximal zwei 90° Biegungen für das Antennenkabel sind.
Schau mal in den 2. Post in diesem Thread, da habe ich alle Teile verlinkt, die ich benutzt habe.
Sobald das Wetter mitspielt, gibt es ein Video. Das ist glaube ich wesentlich anschaulicher, als das jetzt alles zu erklären.
Habe den Empfänger in der Mitte, sodass es maximal zwei 90° Biegungen für das Antennenkabel sind.
Bestellt. 30 tage warten  Helix bin ich am wickeln
Helix bin ich am wickeln
Ein update:
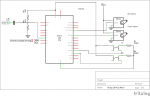
Die dimensionierung der R und C im empfänger ist ziemlich falsch. Bei tests mit audio direkt ab PC soundkarte musste ich die beiden R auf 100K erhöhen und das C auf 100nF.
Kannst du das bei dir einzeichnen?
Das audio testfile ist angehängt. Das ist mit simulierten GPS daten, höhe null, zuerst flug rund um den startpunkt, danach 2 überflüge.
Helix bin ich am wickeln Ein update:
Die dimensionierung der R und C im empfänger ist ziemlich falsch. Bei tests mit audio direkt ab PC soundkarte musste ich die beiden R auf 100K erhöhen und das C auf 100nF.
Kannst du das bei dir einzeichnen?
Das audio testfile ist angehängt. Das ist mit simulierten GPS daten, höhe null, zuerst flug rund um den startpunkt, danach 2 überflüge.
Anhänge
-
1,7 MB Aufrufe: 32
Zuletzt bearbeitet:
Hab den Tracker gerade ausgiebig getestet. Im Code waren noch ganz schön viele Fehler .
Die sollten jetzt alle behoben sein.
Die aktuelle Version liegt auf der git.
Was noch nicht klappt ist das Übertragen.
Meine Ergebnisse:
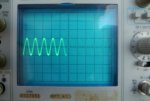
Messe ich so wie am Bild unten rechts, dann kommt das wie oben rechts an.
Meine Einstellungen am Oszi seht ihr unten links.
Messe ich vor dem Kondensator, dann kommt das wie auf dem Bild oben links an.
Wenn ich am Spannungsteiler messe, kommt nur noch misst raus. Das kann aber am Oszi liegen.
Das gute Stück ist fast doppelt so alt wie ich.
Elektronik ist absolut nicht mein Gebiet.
Grüße QuadMax
.Die sollten jetzt alle behoben sein.
Die aktuelle Version liegt auf der git.
Was noch nicht klappt ist das Übertragen.
Meine Ergebnisse:
Messe ich so wie am Bild unten rechts, dann kommt das wie oben rechts an.
Meine Einstellungen am Oszi seht ihr unten links.
Messe ich vor dem Kondensator, dann kommt das wie auf dem Bild oben links an.
Wenn ich am Spannungsteiler messe, kommt nur noch misst raus. Das kann aber am Oszi liegen.
Das gute Stück ist fast doppelt so alt wie ich
.Elektronik ist absolut nicht mein Gebiet.
Grüße QuadMax
Anhänge
-
 737,6 KB Aufrufe: 33
737,6 KB Aufrufe: 33 -
 655,4 KB Aufrufe: 33
655,4 KB Aufrufe: 33 -
 530,5 KB Aufrufe: 39
530,5 KB Aufrufe: 39 -
 469,4 KB Aufrufe: 37
469,4 KB Aufrufe: 37
Bin nun endlich auch einmal dazu gekommen ein kurzes Video zu machen.
[video=youtube;wv4HAjfeEMM]http://youtu.be/wv4HAjfeEMM[/video]
Hier gibt es auch noch ein paar Bilder:
Die Sendeeinheit, die auf den Flieger / Multirotor kommt ist schön kompakt.

Hier die Lösung vom Gelenk:

Meine Bodenstation von innen:

Das ist jetzt eine Möglichkeit, das ganze aufzubauen.
Wer will kann von seiner Version Bilder machen und ich verlinke sie dann ganz vorne im Thread.
Die grüne Platine im letzten Bild ist ein Diversity von Rangarid. Link
Echt cooles Teil, Danke dafür.
[video=youtube;wv4HAjfeEMM]http://youtu.be/wv4HAjfeEMM[/video]
Hier gibt es auch noch ein paar Bilder:
Die Sendeeinheit, die auf den Flieger / Multirotor kommt ist schön kompakt.
Hier die Lösung vom Gelenk:
Meine Bodenstation von innen:
Das ist jetzt eine Möglichkeit, das ganze aufzubauen.
Wer will kann von seiner Version Bilder machen und ich verlinke sie dann ganz vorne im Thread.
Die grüne Platine im letzten Bild ist ein Diversity von Rangarid. Link
Echt cooles Teil, Danke dafür
.Das zweite oszi bild, da stimmt was nicht.
Hast du ein video wie sich das ganze dreht?
Hast du ein "schnittmuster" vom oberen teil, also aufbau mit servos?
Meine servos sollten irgandwann nächste woche eintrudeln.
Anhang wie das bei mir aussieht, aufgenommen mit PC, direkt am mic in eingang der soundkarte.
Hast du ein video wie sich das ganze dreht?
Hast du ein "schnittmuster" vom oberen teil, also aufbau mit servos?
Meine servos sollten irgandwann nächste woche eintrudeln.
Anhang wie das bei mir aussieht, aufgenommen mit PC, direkt am mic in eingang der soundkarte.
Anhänge
-
 28,4 KB Aufrufe: 37
28,4 KB Aufrufe: 37
Zuletzt bearbeitet:
Hab schnell mal die Servos angesteuert.
Der Tracker dreht nicht perfekt 180°, das liegt aber am Code.
[video=youtube;bSRO-cwwE6I]http://youtu.be/bSRO-cwwE6I[/video]
Einen 2D Plan habe ich nicht, aber ich habe eine Sketchupdatei von der Box angehängt.
Die Box wude von dem 3D Modell 1:1 ausgefräst.
Habe lediglich später noch die Löcher für die Servos von Hand ausgeschnitten und das
"U-Teil" verstärkt.
Hier noch ein paar Bilder vom Gelenk:



Hatte die Widerstände für den Sender nicht da und habe stattdessen einen 33kOhm genommen.
Als Spannungsteiler einen 3kOhm und 100Ohm. Kondensatoren sind beide 100nf.
Könnte es daran liegen?
Der Tracker dreht nicht perfekt 180°, das liegt aber am Code.
[video=youtube;bSRO-cwwE6I]http://youtu.be/bSRO-cwwE6I[/video]
Einen 2D Plan habe ich nicht, aber ich habe eine Sketchupdatei von der Box angehängt.
Die Box wude von dem 3D Modell 1:1 ausgefräst.
Habe lediglich später noch die Löcher für die Servos von Hand ausgeschnitten und das
"U-Teil" verstärkt.
Hier noch ein paar Bilder vom Gelenk:
Hatte die Widerstände für den Sender nicht da und habe stattdessen einen 33kOhm genommen.
Als Spannungsteiler einen 3kOhm und 100Ohm. Kondensatoren sind beide 100nf.
Könnte es daran liegen?
Anhänge
-
109,4 KB Aufrufe: 44
Danke für das video, sehr anschaulich
Die skp datai kann ich leider nicht lesen.
Spannungsteiler:
Der gesamtwiederstand des spannungsteilers sollte schon etwa 30K sein, mit deinen 3k bist du weit unten. Ich hab aber festgestellt mein immersionTX sender braucht 1V PP audio und nicht mic level, also ist der spannungsteiler eh falsch.
Miss mal was vor dem spannungsteiler rauskommt, und dimensioniere so dass R1 + R2 = 30k (etwa) und dass du am ausgang ein +- 0.4V audiosignal hast. Nen KO hast du ja Ich hab so ein R set mit verschiedenen werten, das ist sehr hilfreich.
Die skp datai kann ich leider nicht lesen.
Spannungsteiler:
Der gesamtwiederstand des spannungsteilers sollte schon etwa 30K sein, mit deinen 3k bist du weit unten. Ich hab aber festgestellt mein immersionTX sender braucht 1V PP audio und nicht mic level, also ist der spannungsteiler eh falsch.
Miss mal was vor dem spannungsteiler rauskommt, und dimensioniere so dass R1 + R2 = 30k (etwa) und dass du am ausgang ein +- 0.4V audiosignal hast. Nen KO hast du ja
Ich hab so ein R set mit verschiedenen werten, das ist sehr hilfreich.
Die skp datai kann ich leider nicht lesen.
Oder meinst du, das du kein google sketchup hast?
Kann sie dir gerne auch in (fast) jedes andere Format umwandeln.
Fand sketchup nur praktisch, weil es sich jeder kostenlos herunterladen kann.
Sonst schreib mir einfach eine PN, dann schicke ich dir gerne noch Bilder zu
.Bei ImmersionTx von Globeflight steht:
Line-Eingangspegel .3 V
RMS (-10dBv) typ.
RMS (-10dBv) typ.
Zuletzt bearbeitet:
2D Bauplan
Moin,
bin der Jonas, und bin durch Max zum Fpv fliegen gekommen( wir fliegen im gleichen Verein). War bisher nur stiller mitleser, möchte jetzt aber auch mal was über meine Projekte schreiben. Da ich eine CNC Fräse habe, konnte ich Max bei ein paar Sachen helfen. Habe jetzt für die Nachbauer unter euch die Fräsdatei in einen Bauplan umgewandelt. Die PDF einfach ausdrucken (dabei darauf achten das keine Funktionen wie "An Seite anpassen" aktiviert sind). Außer die letzten beiden quadratischen Teile sind leider nicht maßstabsgetreu da sie sonst nicht auf dinA4 gepasst hätten. Jedes Teil ist mit einem kleinen Buchstaben beschriftet (a-k) falls jemand fragen zu einem Teil hat.
Wenn jemand Interesse an einer .dxf oder .dwg hat gebe ich die auch gerne raus.
Grüße Jonas
edit: sorry, beim Plan ist mir leider ein Fehler passiert, Teil b benötigt man 4 mal
Moin,
bin der Jonas, und bin durch Max zum Fpv fliegen gekommen( wir fliegen im gleichen Verein). War bisher nur stiller mitleser, möchte jetzt aber auch mal was über meine Projekte schreiben. Da ich eine CNC Fräse habe, konnte ich Max bei ein paar Sachen helfen. Habe jetzt für die Nachbauer unter euch die Fräsdatei in einen Bauplan umgewandelt. Die PDF einfach ausdrucken (dabei darauf achten das keine Funktionen wie "An Seite anpassen" aktiviert sind). Außer die letzten beiden quadratischen Teile sind leider nicht maßstabsgetreu da sie sonst nicht auf dinA4 gepasst hätten. Jedes Teil ist mit einem kleinen Buchstaben beschriftet (a-k) falls jemand fragen zu einem Teil hat.
Wenn jemand Interesse an einer .dxf oder .dwg hat gebe ich die auch gerne raus.
Grüße Jonas
edit: sorry, beim Plan ist mir leider ein Fehler passiert, Teil b benötigt man 4 mal
Anhänge
-
268,8 KB Aufrufe: 66
Zuletzt bearbeitet:
Danke dir Jonas, genau das hab ich gebraucht. Ich hab keine fräse nur ne säge
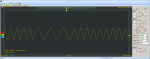
Ich hab mal das SNR von dem softmodem getestet. Dazu verwende ich audacity audio editor und pathsim (von Moe Wheatley). Mit guten leveln geht der empfang sporadisch bis 6db SNR (3khz breite). Zuverlässig über 10db SNR. Die harware-modems können das auch nicht besser
So sieht das bei 6db snr aus:
Ich hab mal das SNR von dem softmodem getestet. Dazu verwende ich audacity audio editor und pathsim (von Moe Wheatley). Mit guten leveln geht der empfang sporadisch bis 6db SNR (3khz breite). Zuverlässig über 10db SNR. Die harware-modems können das auch nicht besser
So sieht das bei 6db snr aus:
Anhänge
-
 28,6 KB Aufrufe: 32
28,6 KB Aufrufe: 32
Danke Jonas für deine Mühe.
Konnte eben erfolgreich Daten empfangen! - Yeah
Allerding hat sich kein Servo bewegt.
Am Empfänger kommen schöne Sinuskurven mit so ~0.9Vpp an.
Den Code, den ich für die Bodenstation benutzt habe liegt hier.
(Kein Kraut und Rüben mehr; extra aufgeräumt mit config.h)
Der Ardu der sendet, hat den Code von Cesco1 github Seite.
Hier habe ich nur:
auf :
geändert, da mein GPS die Daten langsamer sendet.
Außerdem habe ich ihn als TX definiert.
Die Stelle ist im Ardumodem in Zeile 2 bzw 7.
Aber daran sollte es eigentlich nicht liegen, oder ?!?
GPS ist getestet und funktioniert.
Woran könnte das sonst noch liegen?
Habe schon mit dem Schreiben einer detaillierten Bauanleitung angefangen.
Möchte sie aber erst veröffentlichen, wenn alles klappt.
Konnte eben erfolgreich Daten empfangen! - Yeah
Allerding hat sich kein Servo bewegt
.Am Empfänger kommen schöne Sinuskurven mit so ~0.9Vpp an.
Den Code, den ich für die Bodenstation benutzt habe liegt hier.
(Kein Kraut und Rüben mehr; extra aufgeräumt mit config.h
)Der Ardu der sendet, hat den Code von Cesco1 github Seite.
Hier habe ich nur:
#if defined (TX)
SerialOpen(57600);
SerialOpen(57600);
#if defined (TX)
SerialOpen(9600);
SerialOpen(9600);
Außerdem habe ich ihn als TX definiert.
Die Stelle ist im Ardumodem in Zeile 2 bzw 7.
Aber daran sollte es eigentlich nicht liegen, oder ?!?
GPS ist getestet und funktioniert.
Woran könnte das sonst noch liegen?
Habe schon mit dem Schreiben einer detaillierten Bauanleitung angefangen.
Möchte sie aber erst veröffentlichen, wenn alles klappt.
Das 9600 baud gps hat 1 hz?
Meine derzeitige version versucht alle 500ms eine position zu senden. Wenn da nur alle 1000ms was kommt könte es sein der receiver ist dauernd im failsafe.
Ich hab mit GIT etwas probleme (kapiers nicht), aber ich hab inzwischen eine version mit checksumme und anzeige wieviele gute packete empfangen wurden.
Meine derzeitige version versucht alle 500ms eine position zu senden. Wenn da nur alle 1000ms was kommt könte es sein der receiver ist dauernd im failsafe.
Ich hab mit GIT etwas probleme (kapiers nicht), aber ich hab inzwischen eine version mit checksumme und anzeige wieviele gute packete empfangen wurden.
Das 9600 baud gps hat 1 hz?
Meine derzeitige version versucht alle 500ms eine position zu senden. Wenn da nur alle 1000ms was kommt könte es sein der receiver ist dauernd im failsafe.
Meine derzeitige version versucht alle 500ms eine position zu senden. Wenn da nur alle 1000ms was kommt könte es sein der receiver ist dauernd im failsafe.
Wenn es nicht zu viel Aufwand ist, könntest du das im Code anpassen, sodass es mit meinem Gps läuft?
Ich würde gerne testen, ob die Servos sich richtig bewegen/ der Code einwandfrei funktioniert. Bis das neue gps aus China kommt, kann es noch ne ganze Weile dauern.
Gps konnte angepasst werden, die serielle Schnittstelle hat jetzt 57600bps und das GPS hat eine Updaterate von 5hz.
Getan hat sich aber immer noch nichts.
Könntest du ein Testprogramm schreiben, dass eine Postion imitiert? Ich durchblicke den Code zum Senden noch nicht ganz.
Dann könnte ich ausschließen, dass es an der Übertragung liegt.
Getan hat sich aber immer noch nichts.
Könntest du ein Testprogramm schreiben, dass eine Postion imitiert? Ich durchblicke den Code zum Senden noch nicht ganz.
Dann könnte ich ausschließen, dass es an der Übertragung liegt.
Zuletzt bearbeitet:
Was ich bieten kann ist:
TX bei dem wenn GPS ankommt die LED leuchtet, sonst aus. Bim 1hz GPS wird das blinken.
RX bei dem wenn telemetrie ankommt die LED leuchtet, sonst aus.
audio testfile, 1 home position, 2. vorbeiflug.
Achtung diese version benutzt eine checksumme und ist NICHT mit der älteren version kompatibel.
Diese version macht keine extrapolation, bewegungen werden also ziemlich ruckelig sein.
Beachte beim RX ist "#define INTVREF" aktiv, kommentier das bei dir raus.
TX bei dem wenn GPS ankommt die LED leuchtet, sonst aus. Bim 1hz GPS wird das blinken.
RX bei dem wenn telemetrie ankommt die LED leuchtet, sonst aus.
audio testfile, 1 home position, 2. vorbeiflug.
Achtung diese version benutzt eine checksumme und ist NICHT mit der älteren version kompatibel.
Diese version macht keine extrapolation, bewegungen werden also ziemlich ruckelig sein.
Beachte beim RX ist "#define INTVREF" aktiv, kommentier das bei dir raus.
Anhänge
-
5,1 MB Aufrufe: 20
Ich hab inzwischen ein recht schönes signal am sender, 0.3V PP.
Dazu hab ich am spannungsteiler ausgang noch einen 10nF von signal nach masse, und in der soft habe ich den 1000 hz ton leicht schwächer gemacht als den 2000hz ton. Auf dem KO sollten dann 1000hz und 2000hz am eingang sender die gleiche amplitude haben.
Angehängt bild von meinen $60 KO.
Dazu hab ich am spannungsteiler ausgang noch einen 10nF von signal nach masse, und in der soft habe ich den 1000 hz ton leicht schwächer gemacht als den 2000hz ton. Auf dem KO sollten dann 1000hz und 2000hz am eingang sender die gleiche amplitude haben.
Angehängt bild von meinen $60 KO.
Anhänge
-
 56,6 KB Aufrufe: 32
56,6 KB Aufrufe: 32
- Status
- Nicht offen für weitere Antworten.

