
Noch ein update, ein testproggy für den EMPFAENGER.
Ich hab ein kleines proggy das daten direkt vom AD des arduino liest und auf dem PC darstellt.
Zuerst DisplayAD.ino auf den arduino flashen, und dann mit DisplayAD_PC.exe anschauen.
Serieller port muss der zweite in der liste sein, sonst den DisplayAD_PC.pde sketch entsprechend abändern.
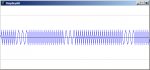
Das FSK signal sollte symmetrich um die schwarze linie, etwa bis zu den beiden grauen linien gehen. Bei mir ist das signal zu schwach, aber schön symmetrisch.
Und ja, das ist ein kleiner KO.
Ich hab ein kleines proggy das daten direkt vom AD des arduino liest und auf dem PC darstellt.
Zuerst DisplayAD.ino auf den arduino flashen, und dann mit DisplayAD_PC.exe anschauen.
Serieller port muss der zweite in der liste sein, sonst den DisplayAD_PC.pde sketch entsprechend abändern.
Das FSK signal sollte symmetrich um die schwarze linie, etwa bis zu den beiden grauen linien gehen. Bei mir ist das signal zu schwach, aber schön symmetrisch.
Und ja, das ist ein kleiner KO.
Anhänge
-
345,6 KB Aufrufe: 32
-
 4,1 KB Aufrufe: 35
4,1 KB Aufrufe: 35
")






