
Endlich GPS für Multiwii
- Themenstarter RC FAN
- Beginndatum
Das verlinkte ist nur nicht das I²C GPS, sondern das Serielle GPS, da kannst du an den Anschlüssen dran gehen.
Das I²C wäre dieses, was allerdings nicht da ist
http://www.drotek.fr/shop/en/88-i2c-pa6c-gps-llc.html
Das I²C wäre dieses, was allerdings nicht da ist
http://www.drotek.fr/shop/en/88-i2c-pa6c-gps-llc.html
Hallo an alle !
Seit MultiWii 1.8 und September 2011 ist ja einige Zeit vergangen.
Vorallem das MultiWii 2.0 ja echt viel nachgerüstet hat.
Ich habe ein CRIUS SE Board, dort wollte ich mir jetzt einen I2C Port anlöten lassen.
Die Frage ist:
Was läuft auf dem CRIUS Board, was auf dem GPS Board?
So wie ich es verstanden habe:
1: Ich löte die I2C Buchse an
2: Ich kaufe / verbinde dieses Board: http://www.flytron.com/sensors/180-i2c-gps-for-multiwii-and-others.html
3: Im CRIUS Sketch aktiviere ich die GPS Optionen:
4: Ich spiele diese Firmware auf das GPS Board:
http://www.multiwii.com/forum/viewtopic.php?f=8&t=390
Dann funktioniert alles?
Wo / Wie definiere ich GPS Home usw?
Auf dem CRIUS Board?
Muss ich ab dann auf beiden Boards rum-programmieren oder wird das GPS Board nur 1x beflasht?
Oder garnicht mehr da das von Flytron schon fertig ist?
Viele Grüße
Sandro
PS:
Könnt ihr mir ein gutes I2C GPS Board empfehlen? Habe die 2 gefunden:
http://www.drotek.fr/shop/en/88-i2c-pa6c-gps-llc.html
http://www.flytron.com/sensors/180-i2c-gps-for-multiwii-and-others.html
Aber beide sind nicht verfügbar
Seit MultiWii 1.8 und September 2011 ist ja einige Zeit vergangen.
Vorallem das MultiWii 2.0 ja echt viel nachgerüstet hat.
Ich habe ein CRIUS SE Board, dort wollte ich mir jetzt einen I2C Port anlöten lassen.
Die Frage ist:
Was läuft auf dem CRIUS Board, was auf dem GPS Board?
So wie ich es verstanden habe:
1: Ich löte die I2C Buchse an
2: Ich kaufe / verbinde dieses Board: http://www.flytron.com/sensors/180-i2c-gps-for-multiwii-and-others.html
3: Im CRIUS Sketch aktiviere ich die GPS Optionen:
Code:
#define GPS_I2C
[...]
USW
#if defined(GPS_SER) || defined(GPS_I2C) #define KP_GPS_ROLL 0.012 //0.013 //0.008 //0.012 #define KD_GPS_ROLL 0.015 //0.012 //0.010 //0.015 #define KI_GPS_ROLL 0.001 //0.005 //0.000 //0.001 #define KP_GPS_PITCH 0.012 //0.013 #define KD_GPS_PITCH 0.015 //0.012 #define KI_GPS_PITCH 0.001 //0.005 #define GPS_MAX_ANGLE 22 // Maximun roll and pitch angle from gps position control #define DECLINATION_FACTOR 4http://www.multiwii.com/forum/viewtopic.php?f=8&t=390
Dann funktioniert alles?
Wo / Wie definiere ich GPS Home usw?
Auf dem CRIUS Board?
Muss ich ab dann auf beiden Boards rum-programmieren oder wird das GPS Board nur 1x beflasht?
Oder garnicht mehr da das von Flytron schon fertig ist?
Viele Grüße
Sandro
PS:
Könnt ihr mir ein gutes I2C GPS Board empfehlen? Habe die 2 gefunden:
http://www.drotek.fr/shop/en/88-i2c-pa6c-gps-llc.html
http://www.flytron.com/sensors/180-i2c-gps-for-multiwii-and-others.html
Aber beide sind nicht verfügbar
G
@sandrodadon
nein so geht das nicht, hatte ich dir aber schonmal geschrieben.
du brauchst nen extra prozessor das schafft dein cirus board nicht.
einfach gps andüdeln geht nicht.
nein so geht das nicht, hatte ich dir aber schonmal geschrieben.
du brauchst nen extra prozessor das schafft dein cirus board nicht.
einfach gps andüdeln geht nicht.
@sandrodadon
nein so geht das nicht, hatte ich dir aber schonmal geschrieben.
du brauchst nen extra prozessor das schafft dein cirus board nicht.
einfach gps andüdeln geht nicht.
nein so geht das nicht, hatte ich dir aber schonmal geschrieben.
du brauchst nen extra prozessor das schafft dein cirus board nicht.
einfach gps andüdeln geht nicht.
Gruß Philipp


Hallo an alle !
Seit MultiWii 1.8 und September 2011 ist ja einige Zeit vergangen.
Vorallem das MultiWii 2.0 ja echt viel nachgerüstet hat.
Seit MultiWii 1.8 und September 2011 ist ja einige Zeit vergangen.
Vorallem das MultiWii 2.0 ja echt viel nachgerüstet hat.
Ich habe ein CRIUS SE Board, dort wollte ich mir jetzt einen I2C Port anlöten lassen.
Die Frage ist:
Was läuft auf dem CRIUS Board, was auf dem GPS Board?
So wie ich es verstanden habe:
1: Ich löte die I2C Buchse an
Was läuft auf dem CRIUS Board, was auf dem GPS Board?
So wie ich es verstanden habe:
1: Ich löte die I2C Buchse an
2: Ich kaufe / verbinde dieses Board: http://www.flytron.com/sensors/180-i2c-gps-for-multiwii-and-others.html
3: Im CRIUS Sketch aktiviere ich die GPS Optionen:
Code:
#define GPS_I2C
[...]
USW
#if defined(GPS_SER) || defined(GPS_I2C) #define KP_GPS_ROLL 0.012 //0.013 //0.008 //0.012 #define KD_GPS_ROLL 0.015 //0.012 //0.010 //0.015 #define KI_GPS_ROLL 0.001 //0.005 //0.000 //0.001 #define KP_GPS_PITCH 0.012 //0.013 #define KD_GPS_PITCH 0.015 //0.012 #define KI_GPS_PITCH 0.001 //0.005 #define GPS_MAX_ANGLE 22 // Maximun roll and pitch angle from gps position control #define DECLINATION_FACTOR 4deaktivieren
#define GPS_SERIAL 2
aktivieren
#define I2C_GPS
den Wert für Deine Region heraussuchen und eintragen (so wie es im Code beschrieben ist)
#define MAG_DECLINIATION 3.96f
4: Ich spiele diese Firmware auf das GPS Board:
http://www.multiwii.com/forum/viewtopic.php?f=8&t=390
Dann funktioniert alles?
http://www.multiwii.com/forum/viewtopic.php?f=8&t=390
Dann funktioniert alles?
Nein, Du musst die R33 von EOSBundy einspielen:
http://code.google.com/p/i2c-gps-na...e=I2C_GPS_NAV-MultiwiiDev-NAVr33.rar&can=2&q=
Wo / Wie definiere ich GPS Home usw?
Auf dem CRIUS Board?
Auf dem CRIUS Board?
Ich habe mal die Anleitung von EOASBundy ins Deutsche übersetzt. (Fehler nicht ausgeschlossen) Da wird dann beschrieben, was für was da ist:
http://www.wii-copter.de/forum/downloads.php?cat=8
Muss ich ab dann auf beiden Boards rum-programmieren oder wird das GPS Board nur 1x beflasht?
Oder garnicht mehr da das von Flytron schon fertig ist?
Viele Grüße
Sandro
PS:
Könnt ihr mir ein gutes I2C GPS Board empfehlen? Habe die 2 gefunden:
Sandro
PS:
Könnt ihr mir ein gutes I2C GPS Board empfehlen? Habe die 2 gefunden:
http://www.drotek.fr/shop/en/88-i2c-pa6c-gps-llc.html
http://www.flytron.com/sensors/180-i2c-gps-for-multiwii-and-others.html
Aber beide sind nicht verfügbar
http://www.flytron.com/sensors/180-i2c-gps-for-multiwii-and-others.html
Aber beide sind nicht verfügbar
http://www.wii-copter.de/lz-gps.html
Gruß Wolfgang
@ Wolfgang: Danke für die Infos. So sollte jeder sein I2C GPS zum laufen bringen
Leider konnte ich meins noch nicht testen, mir sind letztens 2 Regler beim Test von Robertos Software für den Baro abgeraucht. Sobald ich diese getauscht habe und der Baro läuft kommt mein I2C GPS auf den Quad.
Gruß Philipp
Leider konnte ich meins noch nicht testen, mir sind letztens 2 Regler beim Test von Robertos Software für den Baro abgeraucht. Sobald ich diese getauscht habe und der Baro läuft kommt mein I2C GPS auf den Quad.
Gruß Philipp
Hallo,
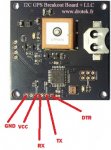
habe nun das richtige Board:
http://www.drotek.fr/shop/en/88-i2c-pa6c-gps-llc.html
In der Anleitung steht man muss erstmal dieses BLINK Beispiel auf den MEGA328 flashen. Hierbei bekomme ich folgende Fehlermeldung:
avrdude: stk500_getsync(): not in sync: resp=0x00
COM Port ist der richtige ich schätze, dass es an dem falsch ausgewählten Board bei Tools--> Board liegt. Welches muss ich dort auswählen damit es klappt?
Vielleicht liegt es auch der falschen Pinbelegung habe es im Moment so verstanden:
MfG
habe nun das richtige Board:
http://www.drotek.fr/shop/en/88-i2c-pa6c-gps-llc.html
In der Anleitung steht man muss erstmal dieses BLINK Beispiel auf den MEGA328 flashen. Hierbei bekomme ich folgende Fehlermeldung:
avrdude: stk500_getsync(): not in sync: resp=0x00
COM Port ist der richtige ich schätze, dass es an dem falsch ausgewählten Board bei Tools--> Board liegt. Welches muss ich dort auswählen damit es klappt?
Vielleicht liegt es auch der falschen Pinbelegung habe es im Moment so verstanden:
MfG
@Wolfgang,
hallo Wolfgang, geht GPS auch mit dem Modul von Flydino? http://flyduino.net/FMP04-GPS-Modul
Ich habe da noch 2 Stück, allerdings eingestellt auf 9600 Baud.
Gruß Paraglider58
hallo Wolfgang, geht GPS auch mit dem Modul von Flydino? http://flyduino.net/FMP04-GPS-Modul
Ich habe da noch 2 Stück, allerdings eingestellt auf 9600 Baud.
Gruß Paraglider58
Hi Wolfgang,
dieses Board habe ich: http://flyduino.net/Flyduino-MEGA-Flight-Controller-CPU-Board
Gruß Paraglider58
@Paraglider58
Der Scatch von EOSBundy nicht, denn es ist ein serielles Modul und kein i2c. Wenn Du einen Atmega mit einem zweiten seriell Port hast, kannst Du es direkt anschließen. Wenn Du einen 328er hast, geht nur i2c.
Gruß Wolfgang
Der Scatch von EOSBundy nicht, denn es ist ein serielles Modul und kein i2c. Wenn Du einen Atmega mit einem zweiten seriell Port hast, kannst Du es direkt anschließen. Wenn Du einen 328er hast, geht nur i2c.
Gruß Wolfgang
Gruß Paraglider58
Hi Wolfgang,
dieses Board habe ich: http://flyduino.net/Flyduino-MEGA-Flight-Controller-CPU-Board
Gruß Paraglider58
dieses Board habe ich: http://flyduino.net/Flyduino-MEGA-Flight-Controller-CPU-Board
Gruß Paraglider58
Hier dann nicht #define I2C_GPS aktivieren, sondern #define GPS_SERIAL 2 und #define GPS_BAUD 115200.
Du musst auf dem GPS Modul dann aber noch die 115200 Baud und 10 Hz einstellen.
Der Rest ist dann gleich wie beim i2c.
Gruß Wolfgang
Hi Dave ,
habe das gleich Board und Problem wie du.
Ich hab mir diese Seite auf Deutsch übesetzen lassen.
http://translate.google.de/translat...://www.drotek.fr/forum/viewtopic.php?f=9&t=39
Geht trotzdem nicht.
Ich weiss auch nicht mehr weiter
habe das gleich Board und Problem wie du.
Ich hab mir diese Seite auf Deutsch übesetzen lassen.
http://translate.google.de/translat...://www.drotek.fr/forum/viewtopic.php?f=9&t=39
Geht trotzdem nicht.
Ich weiss auch nicht mehr weiter
Hi Dave ,
habe das gleich Board und Problem wie du.
Ich hab mir diese Seite auf Deutsch übesetzen lassen.
http://translate.google.de/translat...://www.drotek.fr/forum/viewtopic.php?f=9&t=39
Geht trotzdem nicht.
Ich weiss auch nicht mehr weiter
habe das gleich Board und Problem wie du.
Ich hab mir diese Seite auf Deutsch übesetzen lassen.
http://translate.google.de/translat...://www.drotek.fr/forum/viewtopic.php?f=9&t=39
Geht trotzdem nicht.
Ich weiss auch nicht mehr weiter
versuche mal folgendes:
Verbinde den GPS Controller nur mit dem USB Seriell Adapter. Also nicht mit einer Spannungsversorgung.
Der GPS Controller soll nur über den seriellen Adapter mit Spannung versorgt werden.
Ich bezweifle, dass auf diesem Controller beim Programmieren das GPS Modul deaktiviert ist. Dies hätte zur Folge, dass das GPS Board und der Progadapter gleichzeitig über die serielle Leitung senden. Das wird dann nix. Den Fehler hatte ich am Anfang, als ich mein GPS Controller entworfen hab, auch gemacht.
Das wäre mal ein Ansatz. Wenn du Glück hast, wird das GPS Modul nicht mit der Spannung des seriellen Adapters versorgt.
Gruß Wolfgang

