
Hallo zusammen,
wir haben gestern mal mit einer leicht modifizierten EZ 1.5 im wahrsten Sinne des Wortes einen "Feldtest" unternommen und haben die Performance von einem 2,4GHz und 5,8Ghz Testsetup evaluiert und miteinander verglichen.
Testaufbau 2,4Ghz:
AirPi: Pi A+
Air-WiFi : Alfa 036NHA
Air-Antenna: Alfa 036NHA Stock Antena
Gnd Pi: Pi3
Gnd-WiFi: 2x TP-Link 722N
Gnd-Antenna: 2x TP-Link 5dbi Rubber Ducky
Testaufbau 5,8Ghz:
AirPi: Pi A+
Air-WiFi : Alfa 052NH
Air-Antenna: Connex ProSight Antenna
Gnd Pi: Pi3
Gnd-WiFi: 2x CSL-300
Gnd-Antenna: 4x WA5VJB Quad-Patch
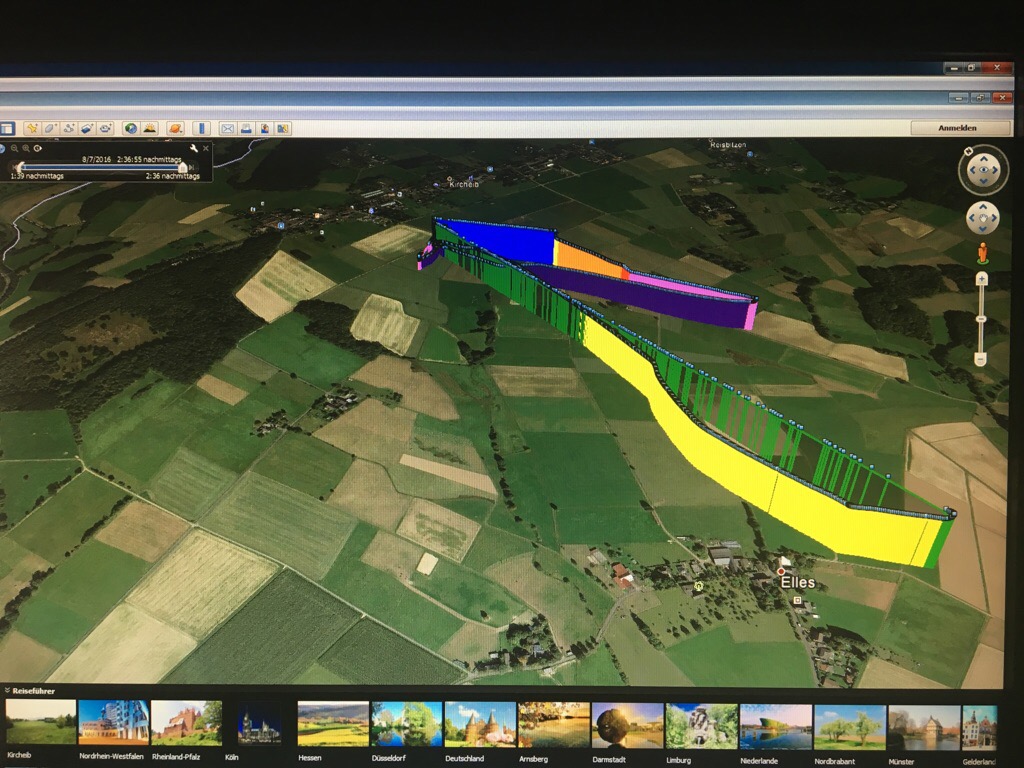
Als Terrain haben wir uns eine große ländliche Freifläche in der Nähe von Kircheib/NRW ausgesucht. Hier wurden die beiden Sender jeweils auf einem Strohballen positioniert und im Anschluss ging es mit dem Auto quer durch die Felder. Wir haben also zunächst einen Boden-zu-Boden Test durchgeführt. Dieses Bild hier illustriert die angefahrenen Messpunkte:
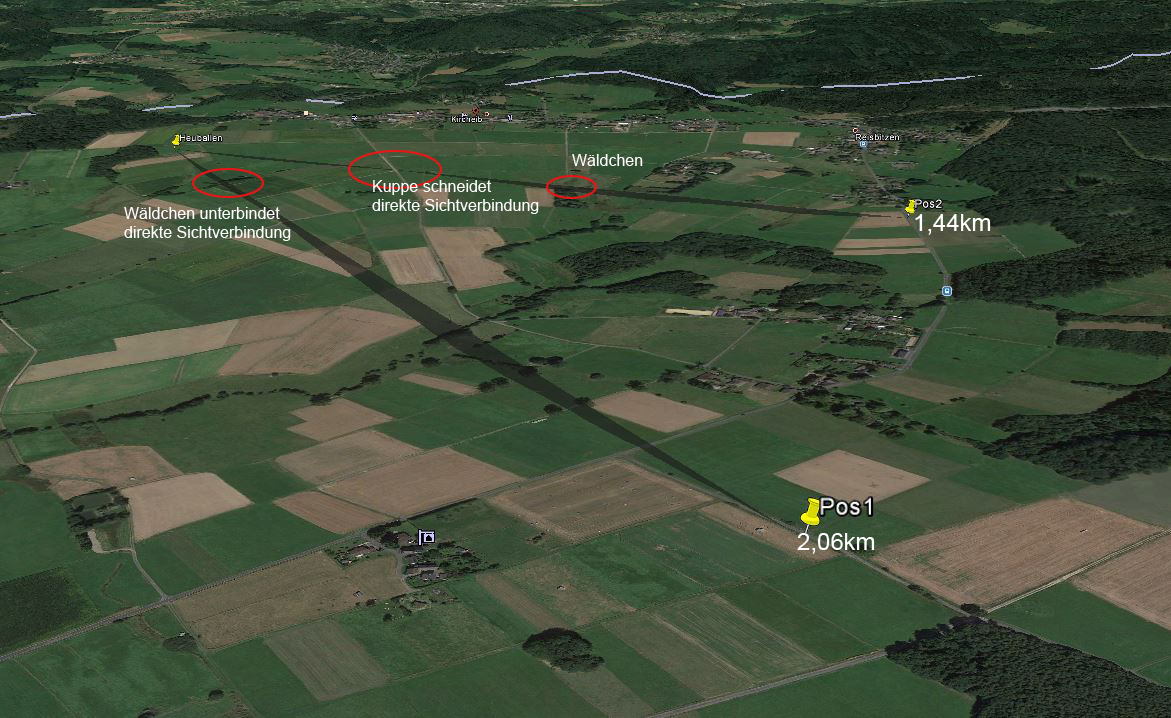
Das 5,8Ghz System funktionierte solange gut, wie eine direkte Sichverbindung gegeben war. Das Terrain hatte jedoch einige Herausforderungen in Petto: entweder kleine Wäldchen oder Täler in deren Funkschatten die Sender verschwanden (ergo: direkte Sichtverbindung unterbrochen oder gestört - Obstacles jeweils rot markiert).
Bei 5,8Ghz war in diesen Situationen trotz gerichteter Patch-Antennen das Signal sofort vollständig weg. 2,4Ghz mit den omidirektionalen Antennen hatte zwar auch zu kämpfen... hatte aber sowohl an POS1 und POS2 sobald Pakete empfangen wurden ein glasklares Bild.
POS1 ging nur bei 2,4Ghz, POS2 sowohl mit 2,4 als auch mit 5,8Ghz... letzteres aber deutlich instabiler als der 2,4Ghz Link.
Soweit so gut. Das Ergbnis hatten wir so auch erwartet.
Das bestärkte uns nur darin die RC-Steuerung über WifiBroadcast (hierin lag unsere leichte Modifikation) mit 2,4Ghz zu testen. Als RC-Steuerung setzen wir auf eine Erweiterung der EZ 1.5. Als Steuerprotokoll kam hier MavLink zum Einsatz. Als Fluggerät diente ein pragmatisch zusammengebastelter Testcopter mit Pixhawk Steuerung. Letzteren haben wir gewählt weil die RTH-Fähigkeiten dieser Plattform extrem zuverlässig und gut funktionieren. (hinsichtlich "Precision Landing" kann sich der DJI Mavic noch etwas beim Pixhawk abgucken ;-)
Hier mal ein Bild des genutzen Setups:
(man beachte die fehlende RC-Antenne an der Taranis - diese dient lediglich als besserer USB-Jockstick für den Pi3 im dahinter angebrachten Alu-Gehäuse)

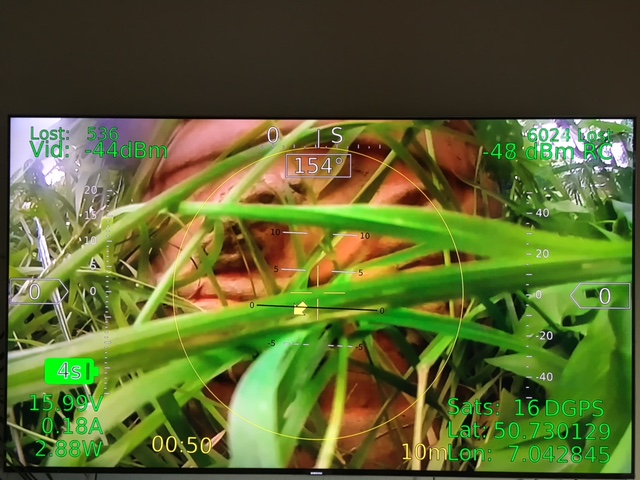
Als Ergebnis konnten wir 700m Entfernung erfliegen - vollkommen ohne Störungen und mit glasklarem Bild und ebenfalls aufgebohrtem Telemetrie-OSD. Hier wäre deutlich(!!) mehr drin gewesen aber leider spielte unser in die Jahre gekommener Akku nicht mit (massiver Voltage Drop unter Last, sodass wir vorzeitig abbrechen mussten).
Dasselbe Setup mit einer jüngeren Version von EZ-Wifibroadcast (ich glaube v1.2) hat aber bereits vor ca. 1 Jahr etwa 1,7km geschaft (Video+RC über 2,4Ghz WBC). Hier gab es zwar im Video noch relativ häufig Bad-Blocks... die Steuerung lief aber super stabil. Hier wäre ebenfalls noch mehr Strecke drin gewesen. Einzig limitierender Faktor war eine parallel betriebene 3DRadio Strecke (433Mhz) die bei Erreichen ihrer Reichweitengrenze ein Telemetry-Failsafe und damit RTH auslöste.
Kleiner Exkurs: Zu etwa dieser Zeit wurde der DJI Mavic vorgestellt und unsere Motivation etwas Eigenes auf die Beine zu stellen war am Boden. Durch die zunehmende Gängelei seitens DJI haben wir die Arbeit am Projekt aber nun wieder aufgenommen
Fazit: Mit der EZ 1.5 hat Rodizio einen super Job gemacht.
Unser Test hat gezeigt, dass sobald eine Sichtverbindung zum Sender möglich ist das Signal stabil wie eine Eins steht und kaum Bildstörungen den Eindruck stören. Wirklich eine tolle Leistung und ein super Engagement was ein dickes THUMBS UP an Rodizio verdient. Ich freue mich, dass wir unsere Modifikationen (RC via MavLink und ein überarbeitetes OSD mit mehreren Screens) Rodizios Projekt heute nach zahlreichen erfolgreichen Tests zur Verfügung stellen können. Wir würden uns freuen wenn diese Features Ihren Weg in EZ-WiFiBroadcast v1.6 fänden und wir damit einen Beitrag zur Weiterentwicklung leisten könnten.
LG
careyer
P.S: anbei noch ein Bild des neuen OSDs (nein das ist kein Gesicht im Hintergrund sondern ein Blumentopf). ;-)
P.S.S: Ich bin nicht der Entwickler (das ist ein guter Freund) sondern lediglich der "Flüsterer" der zusammen bringt was zusammen gehört - liegt wohl an meinem Job ;-)
wir haben gestern mal mit einer leicht modifizierten EZ 1.5 im wahrsten Sinne des Wortes einen "Feldtest" unternommen und haben die Performance von einem 2,4GHz und 5,8Ghz Testsetup evaluiert und miteinander verglichen.
Testaufbau 2,4Ghz:
AirPi: Pi A+
Air-WiFi : Alfa 036NHA
Air-Antenna: Alfa 036NHA Stock Antena
Gnd Pi: Pi3
Gnd-WiFi: 2x TP-Link 722N
Gnd-Antenna: 2x TP-Link 5dbi Rubber Ducky
Testaufbau 5,8Ghz:
AirPi: Pi A+
Air-WiFi : Alfa 052NH
Air-Antenna: Connex ProSight Antenna
Gnd Pi: Pi3
Gnd-WiFi: 2x CSL-300
Gnd-Antenna: 4x WA5VJB Quad-Patch
Als Terrain haben wir uns eine große ländliche Freifläche in der Nähe von Kircheib/NRW ausgesucht. Hier wurden die beiden Sender jeweils auf einem Strohballen positioniert und im Anschluss ging es mit dem Auto quer durch die Felder. Wir haben also zunächst einen Boden-zu-Boden Test durchgeführt. Dieses Bild hier illustriert die angefahrenen Messpunkte:
Das 5,8Ghz System funktionierte solange gut, wie eine direkte Sichverbindung gegeben war. Das Terrain hatte jedoch einige Herausforderungen in Petto: entweder kleine Wäldchen oder Täler in deren Funkschatten die Sender verschwanden (ergo: direkte Sichtverbindung unterbrochen oder gestört - Obstacles jeweils rot markiert).
Bei 5,8Ghz war in diesen Situationen trotz gerichteter Patch-Antennen das Signal sofort vollständig weg. 2,4Ghz mit den omidirektionalen Antennen hatte zwar auch zu kämpfen... hatte aber sowohl an POS1 und POS2 sobald Pakete empfangen wurden ein glasklares Bild.
POS1 ging nur bei 2,4Ghz, POS2 sowohl mit 2,4 als auch mit 5,8Ghz... letzteres aber deutlich instabiler als der 2,4Ghz Link.
Soweit so gut. Das Ergbnis hatten wir so auch erwartet.
Das bestärkte uns nur darin die RC-Steuerung über WifiBroadcast (hierin lag unsere leichte Modifikation) mit 2,4Ghz zu testen. Als RC-Steuerung setzen wir auf eine Erweiterung der EZ 1.5. Als Steuerprotokoll kam hier MavLink zum Einsatz. Als Fluggerät diente ein pragmatisch zusammengebastelter Testcopter mit Pixhawk Steuerung. Letzteren haben wir gewählt weil die RTH-Fähigkeiten dieser Plattform extrem zuverlässig und gut funktionieren. (hinsichtlich "Precision Landing" kann sich der DJI Mavic noch etwas beim Pixhawk abgucken ;-)
Hier mal ein Bild des genutzen Setups:
(man beachte die fehlende RC-Antenne an der Taranis - diese dient lediglich als besserer USB-Jockstick für den Pi3 im dahinter angebrachten Alu-Gehäuse)
Als Ergebnis konnten wir 700m Entfernung erfliegen - vollkommen ohne Störungen und mit glasklarem Bild und ebenfalls aufgebohrtem Telemetrie-OSD. Hier wäre deutlich(!!) mehr drin gewesen aber leider spielte unser in die Jahre gekommener Akku nicht mit (massiver Voltage Drop unter Last, sodass wir vorzeitig abbrechen mussten).
Dasselbe Setup mit einer jüngeren Version von EZ-Wifibroadcast (ich glaube v1.2) hat aber bereits vor ca. 1 Jahr etwa 1,7km geschaft (Video+RC über 2,4Ghz WBC). Hier gab es zwar im Video noch relativ häufig Bad-Blocks... die Steuerung lief aber super stabil. Hier wäre ebenfalls noch mehr Strecke drin gewesen. Einzig limitierender Faktor war eine parallel betriebene 3DRadio Strecke (433Mhz) die bei Erreichen ihrer Reichweitengrenze ein Telemetry-Failsafe und damit RTH auslöste.
Kleiner Exkurs: Zu etwa dieser Zeit wurde der DJI Mavic vorgestellt und unsere Motivation etwas Eigenes auf die Beine zu stellen war am Boden. Durch die zunehmende Gängelei seitens DJI haben wir die Arbeit am Projekt aber nun wieder aufgenommen
Fazit: Mit der EZ 1.5 hat Rodizio einen super Job gemacht.
Unser Test hat gezeigt, dass sobald eine Sichtverbindung zum Sender möglich ist das Signal stabil wie eine Eins steht und kaum Bildstörungen den Eindruck stören. Wirklich eine tolle Leistung und ein super Engagement was ein dickes THUMBS UP an Rodizio verdient. Ich freue mich, dass wir unsere Modifikationen (RC via MavLink und ein überarbeitetes OSD mit mehreren Screens) Rodizios Projekt heute nach zahlreichen erfolgreichen Tests zur Verfügung stellen können. Wir würden uns freuen wenn diese Features Ihren Weg in EZ-WiFiBroadcast v1.6 fänden und wir damit einen Beitrag zur Weiterentwicklung leisten könnten.
LG
careyer
P.S: anbei noch ein Bild des neuen OSDs (nein das ist kein Gesicht im Hintergrund sondern ein Blumentopf). ;-)
P.S.S: Ich bin nicht der Entwickler (das ist ein guter Freund) sondern lediglich der "Flüsterer" der zusammen bringt was zusammen gehört - liegt wohl an meinem Job ;-)
Zuletzt bearbeitet:
")



