Gravity: Monitor mode war das nicht mit dem Tool. RSSI Werte sollten aber die gleichen sein wie im Monitor mode. Treiber sollten eigentlich dabei keinen Unterschied machen, bin aber nicht sicher. Gibt eigentlich nur zwei mögliche Erklärungen: Karte kaputt oder unterschiedliche Werte durch Reflexionen (indoor ist das extrem auf 5.8Ghz) bzw. übersteuern wegen zu hoher Empfangsstärke. Nochmal die Frage: Läuft es ohne Packetloss? Läuft es ansonsten "normal"? Reichweite (durch 3 Wände) scheint ja erstmal okay zu sein. Ich würde das vielleicht nochmal draussen auf freiem Feld testen (oder warten bis ich Zeit habe das mal nachzustellen).
herbs:
Hehe, okay, DER Kühklörper sollte wohl reichen
")
Aber trotzdem wundert mich es immer noch, dass die Karte bei Dir so heiss wird ohne.
Careyer:
Ich will eigentlich lieber kein Datum nennen, dass ich dann sowieso wieder nicht einhalte
Telemetrie TX/RX ist auf jedenfall fertig, muss das ganze noch in die Skripte einbauen, Packetloss/RSSI Anzeige zum OSD hinzufügen, alles nochmal testen und dann sollte es fertig sein.
Changelog sieht im Moment so aus:
- Kernel, Pi firmware and Pi userland updated (Kernel 4.9.35, Raspbian 2017-07-05, Pi0W should work out-of-the-box)
- Latency lowered slightly (Kernel 4.9.35 improves scheduling and jitter, wbc rx -d 1 should work again)
- Mavlink R/C support (thanks dino_de!))
- Support for RTL8192CU cards added (only RX, not tested, for experimenting)
- Support for RTL8812AU cards added (only RX, not tested, for experimenting)
- Bitrate measuring on TX, simplifies FEC and bitrate settings, allows for higher bitrates
- Bitrate display on RX, shows bitrate set on TX as well as live received bitrate on RX
- New downlink and Uplink tx/rx improve telemetry down- and uplink considerably
- OSD renders only (and instantly) when receiving attitude frames, artificial horizon is smoother and less CPU/GPU load
- More efficient tx_rawsock using raw sockets instead of libpcap injection, higher bitrates possible with Pi0/1
- CPU clock lowered to 900Mhz and overvoltage lowered to "3" for less heat and power consumption
- Atheros short preamble mode: Improves CTS protection and R/C link, allows to use 11 and 5.5Mbit datarate "long-range" wifi bitrates
- Atheros medium access parameter THRESH62 lowered from 28 to 24: should improve R/C link
- Atheros medium access parameters SIFS, AIFS, CWMIN, CWMAX, etc. are configurable now
- Increased max. framesize, Atheros wbc payload 1550 bytes, Ralink wbc payload 2278 bytes
- Support for 802.11b 11mbit and 5.5mbit modes added (lower quality/higher range)
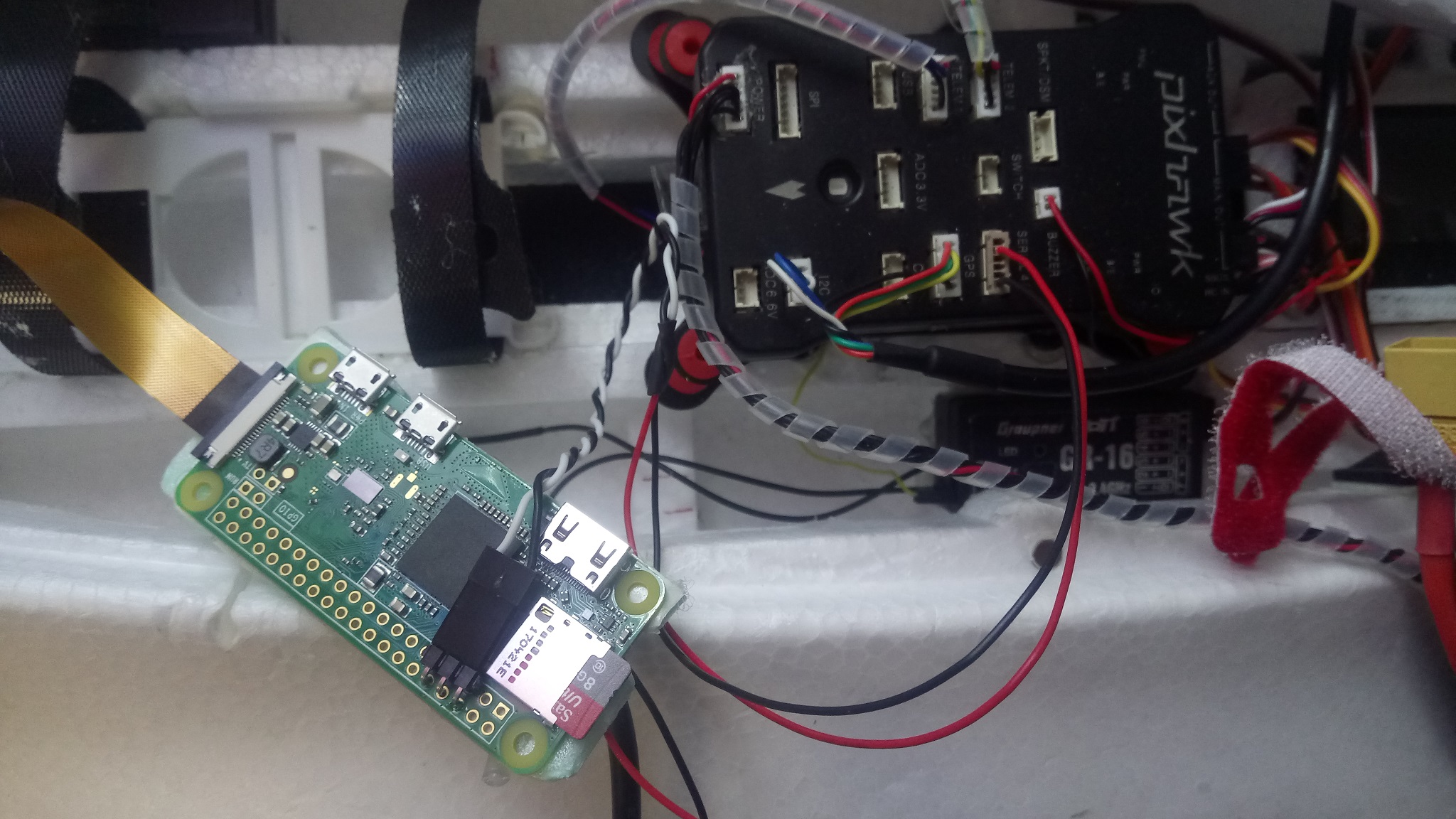
- Support for CDC ACM added (for Pixhawk USB port)
- Support for BCM2385 I2C and Toshiba TC358743 added (not tested, for B101 experimenting)
- Made video UDP port configurable (for Missionplanner)
- Cosmetic fix: cat write error message removed when ramdisk full
- Cosmetic fix: socat init messages removed
- Cosmetic fix: German "O" for "Ost" in OSD compass changed to english "E" for "East"
- Cosmetic fix: OSD RC_RSSI option re-named to WBC_RC_RSSI
- Bug fix: Serial telemetry data corruption due to wrong stty settings
- Bug fix: Pi1A+ turned out not to be 100% stable at 1000MHz CPU clock

 622,3 KB Aufrufe: 36
622,3 KB Aufrufe: 36 745,3 KB Aufrufe: 35
745,3 KB Aufrufe: 35