
Hi
So, das Problem mit den Regler habe ich in den Griff bekommen.
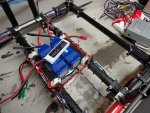
Und hier das Christof versprochene Foto

Wegen fehlenden Props momentan nur als Quadro.
Für den Manual Modus fliegt die Möhre verdammt stabil. Die 2 3300er Lipos haben zu wenig Dampf. 5000er mit mehr Power sind schon geordert.
Der Sound ist aber zu geil. Je nach Drehzahl flüsterleise.
GPS Fix geht hinter dem Haus endlos lange....
So, das Problem mit den Regler habe ich in den Griff bekommen.
Und hier das Christof versprochene Foto
Wegen fehlenden Props momentan nur als Quadro.
Für den Manual Modus fliegt die Möhre verdammt stabil. Die 2 3300er Lipos haben zu wenig Dampf. 5000er mit mehr Power sind schon geordert.
Der Sound ist aber zu geil. Je nach Drehzahl flüsterleise.
GPS Fix geht hinter dem Haus endlos lange....




![IMG_20140330_194107[1].jpg](/data/attachments/58/58631-6c078a4e05542bc8b8c22b9691f198fd.jpg)

