
OTX OpenTX Taranis Programmierung - Tips und Tricks
- Themenstarter kofferfisch
- Beginndatum

Mit Flugphasen kann man viel Anfangen. Zum Beispiel brauche ich sie bei meinen Seglern Oft.
Bei meinen Seglern habe ich flugphase Normal, Speed und Thermik programmiert. Bei Flugphase Normal sind alle Klappen im Strak und die Wölblappen werden mit Quer mitgenommen zur besseren Wendigkeit. Bei Thermik fahren Wölb und Quer ein paar mm runter um den Auftrieb des Flügels zu erhöhen. Bei Speed fahren alle Klappen ein paar mm nach oben um das Profil schneller zu machen. Das alles liegt bei mir auf einem 3 Stufen Schalter und ich kann bequem umschalten.
Die Trimmung muss natürlich in jeder Flugphase auch eine andere sein.
Du kannst also bei Modellen mit den Flugphasen Einstellungen verändern.
Zum Beispiel kannste bei einer Piper mit Landeklappen eine Phase Start und eine Phase Landung Programmieren. Bei Start werden die klappen ein paar Grad runter gefahren um mehr Auftrieb zu bekommen, bei Landung klappen voll runter um zu bremsen.
HTH
Gruß
Alex
Bei meinen Seglern habe ich flugphase Normal, Speed und Thermik programmiert. Bei Flugphase Normal sind alle Klappen im Strak und die Wölblappen werden mit Quer mitgenommen zur besseren Wendigkeit. Bei Thermik fahren Wölb und Quer ein paar mm runter um den Auftrieb des Flügels zu erhöhen. Bei Speed fahren alle Klappen ein paar mm nach oben um das Profil schneller zu machen. Das alles liegt bei mir auf einem 3 Stufen Schalter und ich kann bequem umschalten.
Die Trimmung muss natürlich in jeder Flugphase auch eine andere sein.
Du kannst also bei Modellen mit den Flugphasen Einstellungen verändern.
Zum Beispiel kannste bei einer Piper mit Landeklappen eine Phase Start und eine Phase Landung Programmieren. Bei Start werden die klappen ein paar Grad runter gefahren um mehr Auftrieb zu bekommen, bei Landung klappen voll runter um zu bremsen.
HTH
Gruß
Alex
")
Danke für die Erklärung! Das heisst, ich könnte meinen Nuri so programmieren, dass er auf einem Schalter beim starten die Klappen nach unten drückt um Höhe zu gewinnen und ich nicht mehr so schnell wie möglich versuchen muss, meine rechte Wurfhand wieder an die Knüppel zu bringen
Bei "start" könntest dann die Ruder leicht nach oben nehmen um gleich nach Wurf etwas Höhe zu machen. Wenn Du dann die Hand wieder am Sender hast stellst auf normal um.
Aber grad beim Nuri vorsichtig an die Werte rantasten. Die meisten Nuris die ich kenne reagieren brutal auf Höhe. Also erstmal mit ein paar wenigen Zehntel mm anfangen..........
Genau für solche Sachen sind Flugphasen gut
Zuletzt bearbeitet:
Danke für die Erklärung! Das heisst, ich könnte meinen Nuri so programmieren, dass er auf einem Schalter beim starten die Klappen nach unten drückt um Höhe zu gewinnen und ich nicht mehr so schnell wie möglich versuchen muss, meine rechte Wurfhand wieder an die Knüppel zu bringen
Nach unten würdest du ihn kontrolliert in den boden rammen
Wenn er richtig eingestellt ist, sollte er doch gerade weggehen...
Also die Aussage bezüglich Piper und Landeklappen stimmt schon. Aber eben, sind Landeklappen und nicht Höhen- oder Queerruder!
Es gibt schon Flieger, die bei einem Wing Landeklappen bauen wollen (mich inbegriffen), wenn man beim Landeanflug aber die Höhenruder senkt, steigt die Sinkrate. Bei "richtigen Landeklappen" wird der Auftrieb erhöht. Also nicht ganz gleicher Effekt.
Bei meinem Flügel mach ich nun sicher keine "Pseudolandeklappen" mehr...
Und beim Start können Landeklappen auch helfen - aber nur wenn der Auftrieb dadurch vergrössert wird. Also irgendwas mit Höhenrudern wird auch da nicht funktionieren.
Wer was mit Landeklappen machen will, sollte sich auch die dafür speziellen Scharniere anschauen... Wobei bei einem Wing würd ich das auch nicht machen. Der Effekt beim Fliegen ist (zumindest für Anfänger wie mich) nicht wirklich spürbar. Wenn man scale fliegt, dann macht es Sinn, weils ja ums Auge geht... Und wer schon fliegen kann, kann vermutlich auch ohne Flaps sehr schön landen und verzichtet aufs Zusatzgewicht.
Es gibt schon Flieger, die bei einem Wing Landeklappen bauen wollen (mich inbegriffen
), wenn man beim Landeanflug aber die Höhenruder senkt, steigt die Sinkrate. Bei "richtigen Landeklappen" wird der Auftrieb erhöht. Also nicht ganz gleicher Effekt.Bei meinem Flügel mach ich nun sicher keine "Pseudolandeklappen" mehr...
Und beim Start können Landeklappen auch helfen - aber nur wenn der Auftrieb dadurch vergrössert wird. Also irgendwas mit Höhenrudern wird auch da nicht funktionieren.
Wer was mit Landeklappen machen will, sollte sich auch die dafür speziellen Scharniere anschauen... Wobei bei einem Wing würd ich das auch nicht machen. Der Effekt beim Fliegen ist (zumindest für Anfänger wie mich) nicht wirklich spürbar. Wenn man scale fliegt, dann macht es Sinn, weils ja ums Auge geht... Und wer schon fliegen kann, kann vermutlich auch ohne Flaps sehr schön landen und verzichtet aufs Zusatzgewicht.
Hallo Miteinander
Also ich suche eine .bin Datei für meinen Naza Copter . Komme einfach nicht hinter die Programierung . Also frage ich halt hier mal die Spezialisten. Wunschkonfiguration wäre :
SH - Failsave
SC - GPS /Atti /Man
S2 - Kamera steuern (hoch runter) vorhanden Spidex v2 mit Brushless Gimbal
S1 - LED Beleuchtung steuern ( MWC-Light RGB ) vorhanden
SA - IOC ( Normal /Curse Lock/Home lock)
SG - Höhenansage (aus/ein) vorhanden Frsky Vario
Seitlicher linker Poti - Lautstärke Taranis
Also vorhanden ist eigentlich alles was man braucht
Taranis + X8R SBus (kabel hab ich am Spidex schon mehr als genug)
Kann mir jemand ne passende .bin Datei basteln ??
Gruß Ulli
Also ich suche eine .bin Datei für meinen Naza Copter . Komme einfach nicht hinter die Programierung . Also frage ich halt hier mal die Spezialisten. Wunschkonfiguration wäre :
SH - Failsave
SC - GPS /Atti /Man
S2 - Kamera steuern (hoch runter) vorhanden Spidex v2 mit Brushless Gimbal
S1 - LED Beleuchtung steuern ( MWC-Light RGB ) vorhanden
SA - IOC ( Normal /Curse Lock/Home lock)
SG - Höhenansage (aus/ein) vorhanden Frsky Vario
Seitlicher linker Poti - Lautstärke Taranis
Also vorhanden ist eigentlich alles was man braucht
Taranis + X8R SBus (kabel hab ich am Spidex schon mehr als genug)
Kann mir jemand ne passende .bin Datei basteln ??
Gruß Ulli
Auf rcsettings.com gibt es eine Naza-config, eventuell kannst du damit was anfangen:
http://rcsettings.com/index.php/viewcategory/6-multirotors
http://rcsettings.com/index.php/viewcategory/6-multirotors
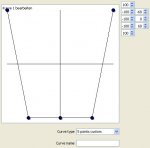
Fahrwerks Door Sequenzer mit 5 Punkt-Kurve
Hy,
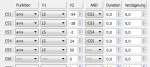
hier mal ein verblüffend einfacher Fahrwerks Door Sequenzer
Kanal 6 sind die Fahrwerksklappen
Kanal 7 sind die Fahrwerke
mit Schalter SF
mit 5 Punktkurve, den 2 Mischerzeilen
und etwas Verzögerung und Langsam
SF betätigen, Klappen gehen auf, Fahrwerk fährt aus, Klappen gehen zu
SF betätigen, Klappen gehen auf, Fahrwerk fährt ein, Klappen gehen zu.
Helle
Hy,
hier mal ein verblüffend einfacher Fahrwerks Door Sequenzer
Kanal 6 sind die Fahrwerksklappen
Kanal 7 sind die Fahrwerke
mit Schalter SF
mit 5 Punktkurve, den 2 Mischerzeilen
und etwas Verzögerung und Langsam
SF betätigen, Klappen gehen auf, Fahrwerk fährt aus, Klappen gehen zu
SF betätigen, Klappen gehen auf, Fahrwerk fährt ein, Klappen gehen zu.
Helle
Anhänge
-
 24,9 KB Aufrufe: 52
24,9 KB Aufrufe: 52 -
 12,6 KB Aufrufe: 44
12,6 KB Aufrufe: 44
Zuletzt bearbeitet:
6 Flugphasen mit Poti schalten
Hallo zusammen,
ich versuche gerade, über einen 6-Stufen-Drehschalter (ersetzt ein Poti) die Flugphasen einzustellen.
Dazu versuche ich, den Potiwert über Custom Switche auszuwerten und
Phase 0: Wert kleiner -54 (Standardphase)
Phase 1: Wert größer -54 -> CS1
Phase 2: Wert größer -28-> CS2
Phase 3: Wert größer -2-> CS3
Phase 4: Wert größer 24-> CS4
Phase 5: Wert größer 50-> CS5
Ich habe Versucht, dass so zu Programmieren, dass ich schaue, dass der Grenzwert überschritten ist UND der darüber liegende CS (noch) nicht aktiv ist. So wollte ich quasi den Range abbilden in dem ein CS aktiv ist (siehe Anhang).
Leider ist das Ergebnis nicht das erwartete. Teilweise sind mehre CS aktiv (z.B. CS1/3, CS2/4, CS1/3/5). Bei so tollen Mustern scheine ich irgendwo einen Logikfehler zu haben...
Hat jemand eine Idee?
VG
Kai
Hallo zusammen,
ich versuche gerade, über einen 6-Stufen-Drehschalter (ersetzt ein Poti) die Flugphasen einzustellen.
Dazu versuche ich, den Potiwert über Custom Switche auszuwerten und
Phase 0: Wert kleiner -54 (Standardphase)
Phase 1: Wert größer -54 -> CS1
Phase 2: Wert größer -28-> CS2
Phase 3: Wert größer -2-> CS3
Phase 4: Wert größer 24-> CS4
Phase 5: Wert größer 50-> CS5
Ich habe Versucht, dass so zu Programmieren, dass ich schaue, dass der Grenzwert überschritten ist UND der darüber liegende CS (noch) nicht aktiv ist. So wollte ich quasi den Range abbilden in dem ein CS aktiv ist (siehe Anhang).
Leider ist das Ergebnis nicht das erwartete. Teilweise sind mehre CS aktiv (z.B. CS1/3, CS2/4, CS1/3/5). Bei so tollen Mustern scheine ich irgendwo einen Logikfehler zu haben...
Hat jemand eine Idee?
VG
Kai
Anhänge
-
 13 KB Aufrufe: 43
13 KB Aufrufe: 43 -
 11,2 KB Aufrufe: 41
11,2 KB Aufrufe: 41
Hy,
hast du schon ab #44 gelesen?
Das geht viel einfacher:
Verwende doch die Funktion a ungefähr x dann hast schon einen Bereich mit kleiner Hysterese
von ca 5%
Welche PPM-Werte hast du mit den Widerständen eingestellt
kannst den PPM Wert anlesen in den Servomenüs und dann um rechnenin die % -Werte
siehe dazu #49
die dann in den CS eingeben und mit ungefähr abfragen,fertig
Beispiel anbei
Helle
hast du schon ab #44 gelesen?
Das geht viel einfacher:
Verwende doch die Funktion a ungefähr x dann hast schon einen Bereich mit kleiner Hysterese
von ca 5%
Welche PPM-Werte hast du mit den Widerständen eingestellt
kannst den PPM Wert anlesen in den Servomenüs und dann um rechnenin die % -Werte
siehe dazu #49
die dann in den CS eingeben und mit ungefähr abfragen,fertig
Beispiel anbei
Helle
Anhänge
-
 41,5 KB Aufrufe: 65
41,5 KB Aufrufe: 65
Zuletzt bearbeitet:

Hallo Taranisprogrammierer,
ich benötige Hilfe. Ich fliege einen Phantom und möchte die Taranis so programmieren, dass über einen Schalter ein Kreisflug möglich ist. Ich stelle mir das so vor: Normalerweise fliegt der Kopter bei gleichzeitiger Ansteuerung von Roll und Pitch eine Diagonale. Ich möchte jetzt, dass die Roll-Ansteuerung durch eine Yaw-Ansteuerung ersetzt wird und der Kopter dadurch auf einer Kreisbahn fliegt. Idealerweise wird der Grad der Yaw Auslenkung durch einen Wert gesteuert, den man mit einem Poti einstellt. Ich bin sicher, dass es möglich ist aber ich bin ehrlich gesagt damit noch überfordert.
Es wäre super, wenn mir jemand auf die Sprünge helfen könnte.
Gruß
Udo
ich benötige Hilfe. Ich fliege einen Phantom und möchte die Taranis so programmieren, dass über einen Schalter ein Kreisflug möglich ist. Ich stelle mir das so vor: Normalerweise fliegt der Kopter bei gleichzeitiger Ansteuerung von Roll und Pitch eine Diagonale. Ich möchte jetzt, dass die Roll-Ansteuerung durch eine Yaw-Ansteuerung ersetzt wird und der Kopter dadurch auf einer Kreisbahn fliegt. Idealerweise wird der Grad der Yaw Auslenkung durch einen Wert gesteuert, den man mit einem Poti einstellt. Ich bin sicher, dass es möglich ist aber ich bin ehrlich gesagt damit noch überfordert.
Es wäre super, wenn mir jemand auf die Sprünge helfen könnte.
Gruß
Udo
Interessante Idee!
Im GPS oder Atti Mode sollte das ja gehen wenn wie du schreibst etwas Pitch und YAW gibts.
Wenn du sowohl bei Pitch und auch bei YAW einen zusätzlichen Mischer anlegst der per Schalter aktiv geschaltet wird und z.B. den Wert eines der Potis zum Kanal dazu addiert sollte das so gehen. Mit dem Poti steuerst dann auch Gewschindigkeit des Kreises und Drehgeschwindigkeit.

So in etwa, Wenn du nix an den knüppeln machst und den Schalter aktivierst flieg er Kreise. Poti 1 steuert Geschwindigkeit nach vorne, Poti 2 die Drehung, beides per GEAR Schalter zuschaltbar.
Wie genau er auf der Kreisbahn bleibt ist eben die Frage, er wird mti dem Wind abdriften denke ich, da das GPS ja erst greift wenn keine Eingabe erfolgt.
Im GPS oder Atti Mode sollte das ja gehen wenn wie du schreibst etwas Pitch und YAW gibts.
Wenn du sowohl bei Pitch und auch bei YAW einen zusätzlichen Mischer anlegst der per Schalter aktiv geschaltet wird und z.B. den Wert eines der Potis zum Kanal dazu addiert sollte das so gehen. Mit dem Poti steuerst dann auch Gewschindigkeit des Kreises und Drehgeschwindigkeit.
So in etwa, Wenn du nix an den knüppeln machst und den Schalter aktivierst flieg er Kreise. Poti 1 steuert Geschwindigkeit nach vorne, Poti 2 die Drehung, beides per GEAR Schalter zuschaltbar.
Wie genau er auf der Kreisbahn bleibt ist eben die Frage, er wird mti dem Wind abdriften denke ich, da das GPS ja erst greift wenn keine Eingabe erfolgt.
Zuletzt bearbeitet:
Sieht gut aus. Ich werde es gleich mal ausprobieren. Vielen Dank.
@edit. Funktioniert leider nicht, weil immer noch die Rollkomponente mit im Spiel ist. D.h. der Kopter macht zusätzlich zur Rotation um die Hochachse noch eine Seitwärtsbewegung. Ideal wäre es, wenn ich den Stick diagonal bewege, es nur noch zu einer Nick- und Yaw Ansteuerung kommt.
@edit. Funktioniert leider nicht, weil immer noch die Rollkomponente mit im Spiel ist. D.h. der Kopter macht zusätzlich zur Rotation um die Hochachse noch eine Seitwärtsbewegung. Ideal wäre es, wenn ich den Stick diagonal bewege, es nur noch zu einer Nick- und Yaw Ansteuerung kommt.
Zuletzt bearbeitet:

