so..
Nach nun ca. 15 Stunden Datenblätter wälzen und Schaltplan zeichnen ist der Schaltplan für die Hauptplatine "vorerst" fertig.
Wenn ich so grob drüber schaue wird wohl alles auf eine Euro Platine passen.
Die zweite Platine ( rotierend ) muss ich wohl auch nochmal anpacken , da sich Tilt in Zukunft "warscheinlich" auch über einen Schrittmotor gelöst wird ( STM hat Samples geschickt
")
) und die Kommunikation zwischen den Boards von SPI auf I2C umgestellt wurde.
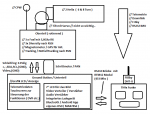
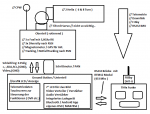
Momentan sind also folgende Features integriert:
Kleine Platine im rotierenden Part:
- 3x Foxtech RX508
- 3 Fach Diversity nach RSSI ( es wird Video und Audio gemuxt )
- 1 zusätzlicher VIDEO /AUDIO in falls die Station einfach mal als Verfolger Kamera genutzt werden soll.
- 1 MAG zur Kalibrierung des Schrittmotors
- Alle 3 RSSI Spannung zur weiteren Verwendung am ADC ( Tracking nach RSSI bei GPS Ausfall )
- EXT Port für eventuelle Erweiterungen ( zuviele PINS unbenutzt
)
- Platzfressender JTAG Port ( Ich muss das Teil ja erstmal entwickeln )
Verbindung zwischen den beiden Boards:
Schleifring : SDA,SCL ( I2C ), +12V, GND, VIDEO,AUDIO)
360° Pan (endlos..)
Mainboard :
- 3 Kanal AUDIO / VIDEO AMP und Verteiler ( Brille, LCD, DVR)
- 240x 128 Grafik LCD mit Touchscreen zur Steuerung
- Schrittmotor Treiber für PAN
- MAX7456 für OSD Einblendungen
- VS1011 MP3 Decoder für Lautstarke Warnmeldungen ( Reichweiten Überschreitung , GPS Verlust , ) ( übertrieben ! aber ich wollte schon immer mal mit diesem Chip Spielen )
- GPS Empfänger zur GS Positionsbestimmung
- 2x BTM222 Bluetooth Module ( Verbindung zur Funke , Verbindung zum Android Phone ( Telemetrie Sprachausgabe , Google Earth , etc. )
- SD Card ( logger , MP3 Meldungen )
- AkkuSpannungsüberwachung
Nachteil :
Es wird ein 12V BLeigel Akku verbaut anstatt eines 11,1 V Lipos
Ich hoffe ich habe nichts vergessen.. bin auf eure Anregungen gespannt !
Layout folgt hoffentlich in den nächsten Tagen!

 31,5 KB Aufrufe: 13
31,5 KB Aufrufe: 13