
An U7 geht nicht. Du musst serial 1 2 oder 3 nutzen. Ich habe tele an 1 mit 433 und teensy 3.1. Serial 2 ist leer und serial 3 ist gps. Osd wäre noch an serial 1 möglich. Kommst du baulich nicht an serial 1 ran?
ja genau, Serial1 liegt in der FRame unpassend, zudem ich die TickTack Dose fliege! ;-)
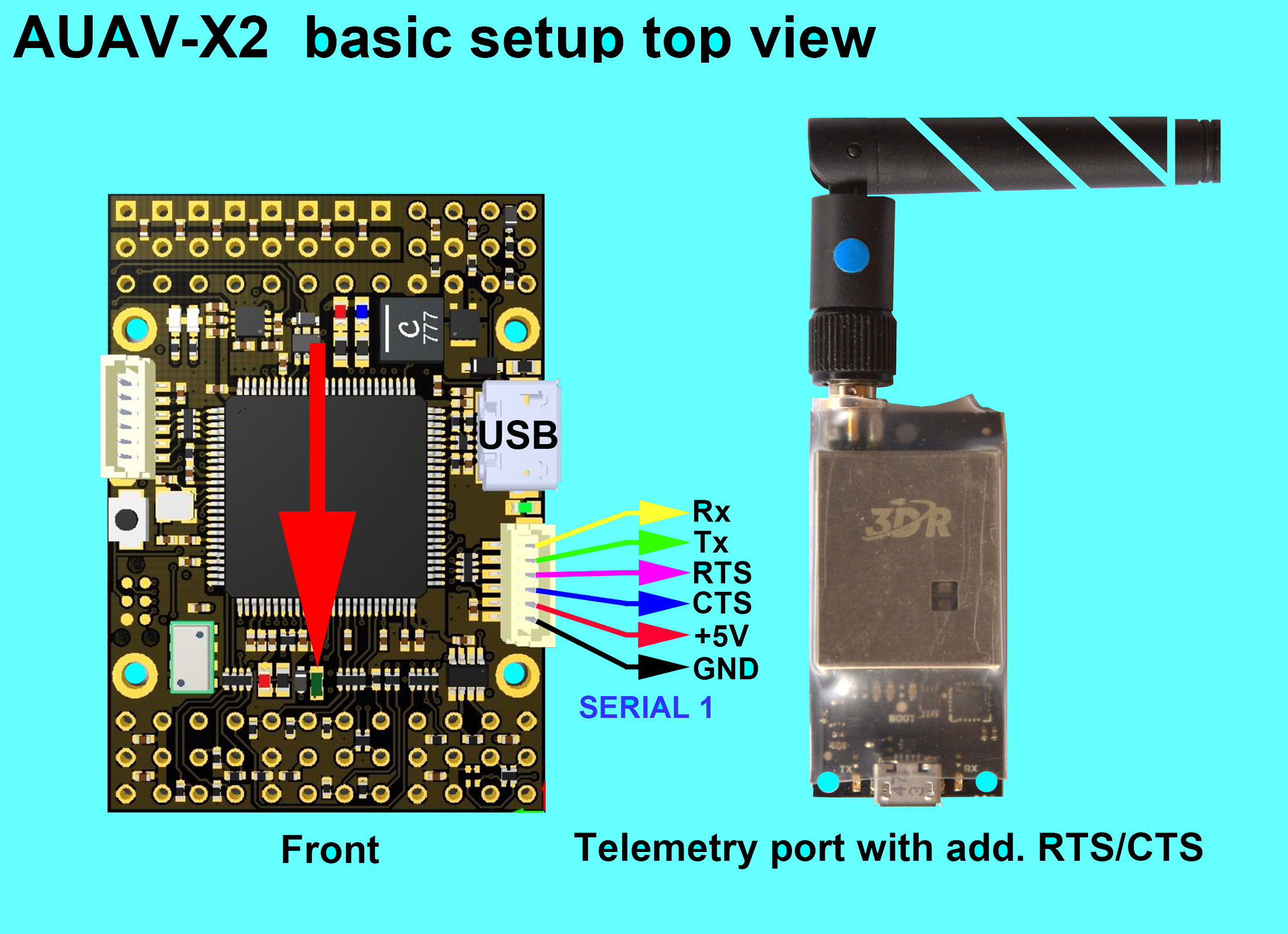
Nur um sicher zu gehen....
Serial1 = liegt oben dem dem USB
Serial2 = UART3 liegt Front/rechts unten (bei mir Telemetrie 433)
Serial3 = UART4 liegt Front/links unten (GPS)
Serial5 = UART7 liegt Front/links mitte (nichts)
Kann ich den Serial 5 für GPS oder Telemetrie nutzen oder muss ich auf die Oberseite mit einem meiner Geräte?
Warum geht der Serial5 nicht, was ist an dem besonderes??






")
 Meine Rübe war wohl gestern Abend schon durch....
Meine Rübe war wohl gestern Abend schon durch.... ...und mal das wiki lesen
...und mal das wiki lesen 
