Die nötige Lötbrücke findest Du hier: http://www.olliw.eu/storm32bgc-wiki/NT_Pins_and_Connectors
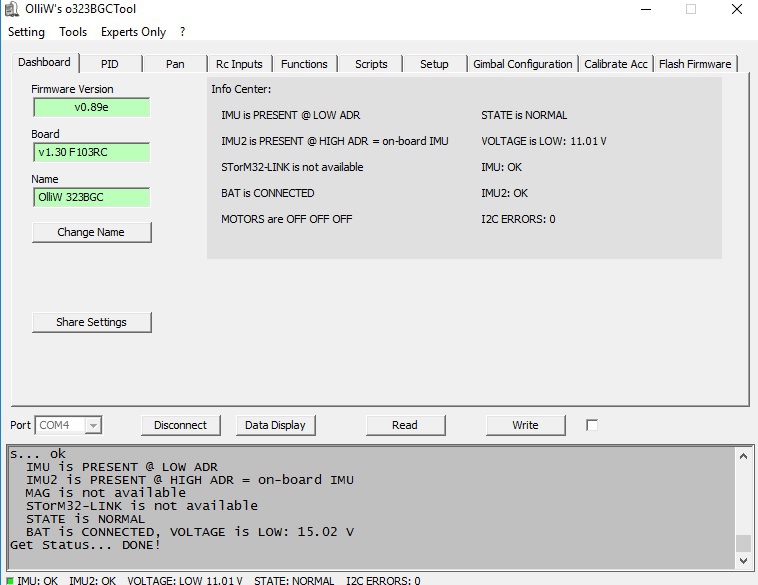
Allerdings, um ehrlich zu sein, glaube ich nicht, dass das die Ursache Deines Problems ist. Schalte doch mal testweise die Onboard-IMU aus und klemm den YAW ab. Dann hast Du zwar nur noch einen 2-Achs-Gimbal, aber wenn der Fehler dann immer noch auftritt, weiss Du, dass es nicht an der zweiten IMU liegt.
Viele Grüße,
Stefan
Allerdings, um ehrlich zu sein, glaube ich nicht, dass das die Ursache Deines Problems ist. Schalte doch mal testweise die Onboard-IMU aus und klemm den YAW ab. Dann hast Du zwar nur noch einen 2-Achs-Gimbal, aber wenn der Fehler dann immer noch auftritt, weiss Du, dass es nicht an der zweiten IMU liegt.
Viele Grüße,
Stefan



![WP_20161025_005[780].jpg](/data/attachments/114/114227-9036902b48a73ede56ed5290ee6a264f.jpg)