Ich denke Stand-Alone wird schwierig, beim KK2 agiert das Gimbal erst wenn das board gearmt ist und die Motoren laufen.
Du müsstest also deinen Empfänger mit mind. 2 Kanälen an das KK2 anschließen um es scharf zu schalten und Gas zu simulieren.
Außerdem musst die 1.5er Firmware mit SSG Mod raufflashen, ist seit gestern in Christians Flashtool.
Mit einem Multiwii würde sich das eher machen lassen, würde aber auch da Änderungen am Code erfordern tippe ich.
Du müsstest also deinen Empfänger mit mind. 2 Kanälen an das KK2 anschließen um es scharf zu schalten und Gas zu simulieren.
Außerdem musst die 1.5er Firmware mit SSG Mod raufflashen, ist seit gestern in Christians Flashtool.
Mit einem Multiwii würde sich das eher machen lassen, würde aber auch da Änderungen am Code erfordern tippe ich.
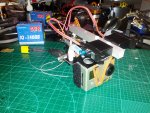
") Als ich Dein Bild vorhin gesehen hab ist mir brandheiß eingefallen, dass ich auch so ein Gimbal bauen wollte. Also direkt mal das CAD angeschmissen. Ich hab mich für eine hängende GoPro Aufnahme entschieden und wollte das Nanowii im Flying Wing Mode als stand alone controller betreiben. Leider bekomme ich es nicht auf die Palette. Die Servos jittern nur so vor sich hin und ich hab keine Ahnung wie ich dem beikommen kann. Falls da jemand einen Tipp hat wäre ich äußerst dankbar. Anbei noch ein paar Bilder des super simple hänge gimbals.
Als ich Dein Bild vorhin gesehen hab ist mir brandheiß eingefallen, dass ich auch so ein Gimbal bauen wollte. Also direkt mal das CAD angeschmissen. Ich hab mich für eine hängende GoPro Aufnahme entschieden und wollte das Nanowii im Flying Wing Mode als stand alone controller betreiben. Leider bekomme ich es nicht auf die Palette. Die Servos jittern nur so vor sich hin und ich hab keine Ahnung wie ich dem beikommen kann. Falls da jemand einen Tipp hat wäre ich äußerst dankbar. Anbei noch ein paar Bilder des super simple hänge gimbals.