
Tarrot TL300L OSD mit GPS
- Themenstarter bubu10
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Tach auch,
habe auch das TL300L und will es gerade in meinen neuen "Wuselkopter" einbauen. Ob das in nem 280er sinnvoll ist, sei mal dahingestellt, zum Spaß eben (hab mir nen Tarot Robocat 280 zugelegt, weil mein Kollege meinte, ich solle endlich aufhören, den armen Phantom in der Gegend rumzuscheuchen, das könne man sich ja nicht mitansehen und sei Tierquälerei! und mir lieber nen Racecopter zulegen, der kann das dann... hmkaaayyy... Am WE war Maiden und ich bin sehr angetan von dem Wusel, den KANN man jetzt scheuchen
hmkaaayyy... Am WE war Maiden und ich bin sehr angetan von dem Wusel, den KANN man jetzt scheuchen
 )
)
Wie auch immer, der VG-Anschluß:
da ist das "V" (Voltage) mit den "V's" der Video-Ein-Ausgänge verbunden.
Die Diode daran zeigt nach innen (Anode am Anschluß "V"). Das hieße aber, daß das ein EINgang ist und kein AUSgang! Nanu?
Wenn ich deinen Satz von oben richtig deute, dann gibts da eine Spannungsversorgung aufm Board, die wohl 12V erzeugt. In der Tat, da ist ne 4R7-beschriftete Spule, ein paar Kerkos und Widerstände und ein IC im SOT23-6-Gehäuse, könnte ein Schaltregler sein. Ok. Aber die Diode ist dann falschrum drin, nanu?!?
Ich schließe es gleich mal an und guck... wenn das ein Ausgang sein will, dann unterbreche ich einfach die Leiterbahn zu den V's der Videoports und dann kann der ImmRC-VTX die Kam über die Pins mit 5V versorgen - wie bisher, ohne OSD.
Das wäre für Ch3fk0ch evtl ebenfalls ne praktikable Lösung. Dann sind die "V's" der Videoports getrennt zum "V" des VG-Ports
ABER: wenn das ein EINgang ist (Diodenrichtung, kein Bestückungsfehler), hielte ich es für wahrscheinlicher, daß das OSD aus der vom VTX gelieferten Spannung den Saft fürs OSD-Board erzeugt, 3,3V oder 5V oder so...
Denn, was ist, wenn man den Flugakku nicht anschließt? Wo bekommt das OSD dann seinen Saft her?
M.M.n. ist das ein EINgang aber ich schkukke gleich mal dsbzgl....
(Hoffentlich hab ich nicht dasselbe Problem wie der Kollege weiter oben, daß zwar Daten, aber kein Bild sichtbar sind...!
Bis dennsn,
o.d.
habe auch das TL300L und will es gerade in meinen neuen "Wuselkopter" einbauen. Ob das in nem 280er sinnvoll ist, sei mal dahingestellt, zum Spaß eben (hab mir nen Tarot Robocat 280 zugelegt, weil mein Kollege meinte, ich solle endlich aufhören, den armen Phantom in der Gegend rumzuscheuchen, das könne man sich ja nicht mitansehen und sei Tierquälerei! und mir lieber nen Racecopter zulegen, der kann das dann...
hmkaaayyy... Am WE war Maiden und ich bin sehr angetan von dem Wusel, den KANN man jetzt scheuchen
Wie auch immer, der VG-Anschluß:
da ist das "V" (Voltage) mit den "V's" der Video-Ein-Ausgänge verbunden.
Die Diode daran zeigt nach innen (Anode am Anschluß "V"). Das hieße aber, daß das ein EINgang ist und kein AUSgang! Nanu?
Wenn ich deinen Satz von oben richtig deute, dann gibts da eine Spannungsversorgung aufm Board, die wohl 12V erzeugt. In der Tat, da ist ne 4R7-beschriftete Spule, ein paar Kerkos und Widerstände und ein IC im SOT23-6-Gehäuse, könnte ein Schaltregler sein. Ok. Aber die Diode ist dann falschrum drin, nanu?!?
Ich schließe es gleich mal an und guck... wenn das ein Ausgang sein will, dann unterbreche ich einfach die Leiterbahn zu den V's der Videoports und dann kann der ImmRC-VTX die Kam über die Pins mit 5V versorgen - wie bisher, ohne OSD.
Das wäre für Ch3fk0ch evtl ebenfalls ne praktikable Lösung. Dann sind die "V's" der Videoports getrennt zum "V" des VG-Ports
ABER: wenn das ein EINgang ist (Diodenrichtung, kein Bestückungsfehler), hielte ich es für wahrscheinlicher, daß das OSD aus der vom VTX gelieferten Spannung den Saft fürs OSD-Board erzeugt, 3,3V oder 5V oder so...
Denn, was ist, wenn man den Flugakku nicht anschließt? Wo bekommt das OSD dann seinen Saft her?
M.M.n. ist das ein EINgang
aber ich schkukke gleich mal dsbzgl....(Hoffentlich hab ich nicht dasselbe Problem wie der Kollege weiter oben, daß zwar Daten, aber kein Bild sichtbar sind...!
Bis dennsn,
o.d.Hmm, also...
1. es ist definitiv ein Eingang. Er versorgt das OSD-Board mit Saft.
2. 5V Eingangsspannung sind anscheinend zu wenig, denn am GPS+5V-Pin liegen nur 3,79V an. Zu wenig! Da diese aus den 5V an den Videoports erzeugt werden und bei noch nicht einmal angeschlossenem GPS-Empf., sind 5V als Versorgung zuwenig.
3. außerdem kommen weder Bild noch Ton, nur ab und zu ein "Gekratzel" aufm Schirm an.
4. das Anschließen eines Akkus an "Eng" ohne sonstige Versorgung bewirkt ... nichts.
Ein BEC noch dazufummeln will ich nicht! Kän Blatz fer so Ferz!

Lösungsansatz:
Vin von den Videoports trennen, dann kann mein FPV-Gedöns weiterhin auf 5V bleiben und das OSD merkt nix davon.
An den Vin-Pin mit seinem GND-Pin wird der Akku angeschlossen mit seinen ca 12V (3s), also parallel zum EngIn-Pin und dessen GND. Oder muss das potenzialfrei bleiben? (wobei mir kein echter Grund dafür einfallen würde...).
Gut ist: dem OSD liegt eine für chinesische Verhältnisse sehr umfangreiche und bunt bebilderte Doku bei. Top!
Leider ausschließlich in chinesisch. Flop!
Vllt hab ich in dem Fred auch was überlesen?
 Hmm.... nochmal gucken...
Hmm.... nochmal gucken...
***upps, im ersten Post stehts ja... hatte ich wohl irgendwie mißverstanden... tststs.

1. es ist definitiv ein Eingang. Er versorgt das OSD-Board mit Saft.
2. 5V Eingangsspannung sind anscheinend zu wenig, denn am GPS+5V-Pin liegen nur 3,79V an. Zu wenig! Da diese aus den 5V an den Videoports erzeugt werden und bei noch nicht einmal angeschlossenem GPS-Empf., sind 5V als Versorgung zuwenig.
3. außerdem kommen weder Bild noch Ton, nur ab und zu ein "Gekratzel" aufm Schirm an.
4. das Anschließen eines Akkus an "Eng" ohne sonstige Versorgung bewirkt ... nichts.
Ein BEC noch dazufummeln will ich nicht! Kän Blatz fer so Ferz!
Lösungsansatz:
Vin von den Videoports trennen, dann kann mein FPV-Gedöns weiterhin auf 5V bleiben und das OSD merkt nix davon.
An den Vin-Pin mit seinem GND-Pin wird der Akku angeschlossen mit seinen ca 12V (3s), also parallel zum EngIn-Pin und dessen GND. Oder muss das potenzialfrei bleiben? (wobei mir kein echter Grund dafür einfallen würde...).
Gut ist: dem OSD liegt eine für chinesische Verhältnisse sehr umfangreiche und bunt bebilderte Doku bei. Top!
Leider ausschließlich in chinesisch. Flop!
Vllt hab ich in dem Fred auch was überlesen?
***upps, im ersten Post stehts ja... hatte ich wohl irgendwie mißverstanden... tststs.
Zuletzt bearbeitet:
Funzt!
sodele, alles gemacht wie geschrieben. Funzt. Nettes Teil
- Versorgung direkt vom Flug-Akku.
- Nix BEC!
- VCC-Leitung zu den Videoports unterbrochen.
- Kam bekommt ihre 5V vom VTX über die Videoports, die sind ja nun getrennt vom VCC
- GPS-"Pizzablech" direkt angelötet, um Platz zu sparen (es gibt nicht viel davon).
Testtesttest... ... Bild da! Funzt!!
Danach gleich "customisiert", paar Anzeigen ausgeschaltet, andere umpositioniert. Gut ist! Yess!
Bilder:

VCC-Leiterbahn zu den Videoports unterbrochen und Platine eingeschrumpft
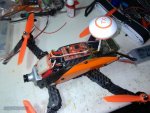
stopf!!!

Mannmann, paßt geraaaadeso...

First light - ähh...biddääh was?? Chingchangchong??

Customized!

Morgen gehts in die Luft damit!
Guts Nächtle,
o.d.
sodele, alles gemacht wie geschrieben. Funzt. Nettes Teil
- Versorgung direkt vom Flug-Akku.
- Nix BEC!
- VCC-Leitung zu den Videoports unterbrochen.
- Kam bekommt ihre 5V vom VTX über die Videoports, die sind ja nun getrennt vom VCC
- GPS-"Pizzablech" direkt angelötet, um Platz zu sparen (es gibt nicht viel davon).
Testtesttest... ... Bild da! Funzt!!
Danach gleich "customisiert", paar Anzeigen ausgeschaltet, andere umpositioniert. Gut ist! Yess!
Bilder:
VCC-Leiterbahn zu den Videoports unterbrochen und Platine eingeschrumpft
stopf!!!
Mannmann, paßt geraaaadeso...
First light - ähh...biddääh was?? Chingchangchong??
Customized!
Morgen gehts in die Luft damit!
Guts Nächtle,
o.d.
Zuletzt bearbeitet:
Moin Moin,
ich habe mir gestern die das Tarot Tl300l bestellt. Scheint ja wirklich ein Top Preis-/Leistungverhältnis zu sein. Jetzt lese ich mich natürlich schon mal schlau was das anschliessen angeht. Jetzt nochmal extra gaaaanz laaaangsam nur für mich:
- am ENG in schließe ich z.B. den Fluglipo an und die Spannung wird mir dann im OSD angezeigt (sonst keine Funktion)
- am VCC in schließe ich min 7V an, da dies die Versorgungsspannung für den Tarot ist. Diese wird mir ebenfalls im OSD in einer zweiten Anzeige gezeigt UND ganz wichtig - diese Spannung liegt dann auch bei den Video Ein- und Ausgängen an !!!
Soviel ist klar. Jetzt nutze ich das Livebild aus meiner RunCam HD (ich weiß - nicht optimal - aber erstmal reicht mir das) über den USB Ausgang. Hier gehen zwei Stecker ab. Einer mit Plus und Minus, der 5V über meinen Empfänger einspeist und ein Stecker mit Video und GND. Wenn ich jetzt z.B. den 3S Lipo mit 12V an VCC anschliesse und den Video Stecker der RunCam an Video In des Tarot (ohne den Plus Pin zu benutzen - nur Video und GND) die 5V der RunCAm kommen weiter vom Empfänger - geht das dann so? Die RunCam dürfte dann ja nichts von den 12V bekommen und das Videosignal kommt zum Tarot. Bin mir jetzt nur nicht sicher wie sich das mit GND verhält. Mit dem Videoausgang würde ich es ebenso machen. Der Sender bekommt seine Versorgungsspannung seperat und das Video + GND vom Tarot.
Okke Dillen: Hast Du die Leiterbahn auf der Platine unterbrochen/weggekratzt ? Oder wie hast Du das umgesetzt?
Ansonsten schon mal vielen Dank für die tollen Tipps hier im Forum
Gruß vom Neuling
Spiecky
ich habe mir gestern die das Tarot Tl300l bestellt. Scheint ja wirklich ein Top Preis-/Leistungverhältnis zu sein. Jetzt lese ich mich natürlich schon mal schlau was das anschliessen angeht. Jetzt nochmal extra gaaaanz laaaangsam nur für mich:
- am ENG in schließe ich z.B. den Fluglipo an und die Spannung wird mir dann im OSD angezeigt (sonst keine Funktion)
- am VCC in schließe ich min 7V an, da dies die Versorgungsspannung für den Tarot ist. Diese wird mir ebenfalls im OSD in einer zweiten Anzeige gezeigt UND ganz wichtig - diese Spannung liegt dann auch bei den Video Ein- und Ausgängen an !!!
Soviel ist klar. Jetzt nutze ich das Livebild aus meiner RunCam HD (ich weiß - nicht optimal - aber erstmal reicht mir das) über den USB Ausgang. Hier gehen zwei Stecker ab. Einer mit Plus und Minus, der 5V über meinen Empfänger einspeist und ein Stecker mit Video und GND. Wenn ich jetzt z.B. den 3S Lipo mit 12V an VCC anschliesse und den Video Stecker der RunCam an Video In des Tarot (ohne den Plus Pin zu benutzen - nur Video und GND) die 5V der RunCAm kommen weiter vom Empfänger - geht das dann so? Die RunCam dürfte dann ja nichts von den 12V bekommen und das Videosignal kommt zum Tarot. Bin mir jetzt nur nicht sicher wie sich das mit GND verhält. Mit dem Videoausgang würde ich es ebenso machen. Der Sender bekommt seine Versorgungsspannung seperat und das Video + GND vom Tarot.
Okke Dillen: Hast Du die Leiterbahn auf der Platine unterbrochen/weggekratzt ? Oder wie hast Du das umgesetzt?
Ansonsten schon mal vielen Dank für die tollen Tipps hier im Forum
Gruß vom Neuling
Spiecky
3S Lipo mit 12V an VCC anschliesse und den Video Stecker der RunCam an Video In des Tarot (ohne den Plus Pin zu benutzen - nur Video und GND) die 5V der RunCAm kommen weiter vom Empfänger
Test des Tarrot TL300L OSD mit GPS
Hallo Tarot OSD Anwender,
diese Woche, am Di. 03.11.2015 habe ich nun auch mein Tarot OSD erhalten von Banggood.
Die hier im Forum und bei RC-groups positive OSD Beschreibung hatte mich überzeugt es ebenfalls zu kaufen.
Die Inbetriebnahme war dank der Beschreibung in beiden Foren und des mitgelieferten Prospektes ganz einfach. Den VG Eingang schliese ich an einen 3S Flugakku an und an den EG Eingang das Tiefpass gefilterte PWM Signal des openlrs Empfängers über einen OP-Spannungsfolger.
Meine ersten Tests habe ich noch nicht im Modell sondern auf einem Testbrett ausgeführt. Am OVG Ausgang ist ein 7" Monitor angeschlossen und am IVG Eingang eine TVL600 bzw, über ein LM2596 Step-dpown Modul (12V auf 5V) eine Keycam. Mit beiden Kameras war eine Funktion vorhanden. Auch ohne Video Eingangssignal hat man ein Ausgangssignal mit dem OSD Overlay Text.
Im OSD Setting Menue habe ich den Interface Style "Custom" , Height Get Device "BARO" und AutosetHome "ON" eingestellt. Zum Testen der ganzen Funktion im Freien habe ich das OSD ohne Video-Kameras auf ein Testbrett aufgebaut, um mich mit den erfolgten Anzeigen vertraut zu machen, bevor ich das OSD ins Modell einbaue. Bei meiner Bike-Tour in meiner Gegend konnte ich die vielfältigen Funktion des OSD bestens kennen lernen.
6 Minuten nach dem Einschalten waren 6 Satelliten neben dem Satelitensymbol angezeigt und gleichzeitig wurde automatisch "HOME SET" angezeigt. Gleichzeitig wird dabei auch die Zeit nochmals auf 0 gestellt. Zwischen 5 bis 11 Satelliten wurden im Verlauf des Tests immer angezeigt.
Bis auf Azimuth und Home direction waren sofort alle Ausgaben plausibel. Anfangs konnte ich mit den z.T. sich schnell ändernden Zahlen u. Pfeilen bei diesen beiden Funktionen nichts anfangen. In der Zwischenzeit habe ich auch diese beiden Funktionen jedoch verstanden und sie schätzen gelernt. Denn diese Funktionen erlauben ein einwandfreies RTH/RTL navigieren. Sollte während des Fluges einmal eine Kamera ausfallen, so kann man damit und mit der Höhenausgabe sauber nach Hause navigieren.
Zu beiden Funktionen "Azimuth und Home direction" sind bisher hier im Forum und bei RC-groups wenig Hinweise zu finden, deshalb nehme ich an, dass Ihr alle diese beiden Funktionen verstanden habt.
MfG Joe
Daten der verwendeten ICs auf dem Board u. sonstige Hinweise
uController: STM 8500 SK6T6C
Einblendbaustein: MAX7456
Drucksensor: I244 U205
Step-down IC: F8FD
Die Spannungsmessung beider Eingänge erfolgt über einen Widerstandsteiler 22K +3.3K =25.3k.
Der Teilerfaktor beträgt dabei 3.3k/25.3k = 0.13. Bei 12 V an den Eingängen liegen also nur 12x0,13 = 1,56V an den AD Eingängen des Microcontrollers.
Benutzt man den ENG Eingang zur RSSI Anzeige von einem openlrs Empfänger mit PWM Ausgang, so entsteht durch den Vorwiderstand des Tiefpassfilters von z.B. 10k ein Messfehler. Mit einem OP-Spannungsfolger vermeidet man diesen Messfehler.
Hallo Tarot OSD Anwender,
diese Woche, am Di. 03.11.2015 habe ich nun auch mein Tarot OSD erhalten von Banggood.
Die hier im Forum und bei RC-groups positive OSD Beschreibung hatte mich überzeugt es ebenfalls zu kaufen.
Die Inbetriebnahme war dank der Beschreibung in beiden Foren und des mitgelieferten Prospektes ganz einfach. Den VG Eingang schliese ich an einen 3S Flugakku an und an den EG Eingang das Tiefpass gefilterte PWM Signal des openlrs Empfängers über einen OP-Spannungsfolger.
Meine ersten Tests habe ich noch nicht im Modell sondern auf einem Testbrett ausgeführt. Am OVG Ausgang ist ein 7" Monitor angeschlossen und am IVG Eingang eine TVL600 bzw, über ein LM2596 Step-dpown Modul (12V auf 5V) eine Keycam. Mit beiden Kameras war eine Funktion vorhanden. Auch ohne Video Eingangssignal hat man ein Ausgangssignal mit dem OSD Overlay Text.
Im OSD Setting Menue habe ich den Interface Style "Custom" , Height Get Device "BARO" und AutosetHome "ON" eingestellt. Zum Testen der ganzen Funktion im Freien habe ich das OSD ohne Video-Kameras auf ein Testbrett aufgebaut, um mich mit den erfolgten Anzeigen vertraut zu machen, bevor ich das OSD ins Modell einbaue. Bei meiner Bike-Tour in meiner Gegend konnte ich die vielfältigen Funktion des OSD bestens kennen lernen.
6 Minuten nach dem Einschalten waren 6 Satelliten neben dem Satelitensymbol angezeigt und gleichzeitig wurde automatisch "HOME SET" angezeigt. Gleichzeitig wird dabei auch die Zeit nochmals auf 0 gestellt. Zwischen 5 bis 11 Satelliten wurden im Verlauf des Tests immer angezeigt.
Bis auf Azimuth und Home direction waren sofort alle Ausgaben plausibel. Anfangs konnte ich mit den z.T. sich schnell ändernden Zahlen u. Pfeilen bei diesen beiden Funktionen nichts anfangen. In der Zwischenzeit habe ich auch diese beiden Funktionen jedoch verstanden und sie schätzen gelernt. Denn diese Funktionen erlauben ein einwandfreies RTH/RTL navigieren. Sollte während des Fluges einmal eine Kamera ausfallen, so kann man damit und mit der Höhenausgabe sauber nach Hause navigieren.
Zu beiden Funktionen "Azimuth und Home direction" sind bisher hier im Forum und bei RC-groups wenig Hinweise zu finden, deshalb nehme ich an, dass Ihr alle diese beiden Funktionen verstanden habt.
MfG Joe
Daten der verwendeten ICs auf dem Board u. sonstige Hinweise
uController: STM 8500 SK6T6C
Einblendbaustein: MAX7456
Drucksensor: I244 U205
Step-down IC: F8FD
Die Spannungsmessung beider Eingänge erfolgt über einen Widerstandsteiler 22K +3.3K =25.3k.
Der Teilerfaktor beträgt dabei 3.3k/25.3k = 0.13. Bei 12 V an den Eingängen liegen also nur 12x0,13 = 1,56V an den AD Eingängen des Microcontrollers.
Benutzt man den ENG Eingang zur RSSI Anzeige von einem openlrs Empfänger mit PWM Ausgang, so entsteht durch den Vorwiderstand des Tiefpassfilters von z.B. 10k ein Messfehler. Mit einem OP-Spannungsfolger vermeidet man diesen Messfehler.
Problem UHF LRS Empfänger Störungen durch Tarot OSD
Hallo Tarot OSD-Anwender,
was ist Eure Erfahrung mit Tarot OSD und UHF-LRS-System? Wie habt Ihr Interferenzprobleme gelöst?
Mein 1-st-Tests mit meinem Easystar im Freien in dieser Woche findet ihr hier:
Tarot OSD verursacht starke UHF Interferenz in den LRS 433-435MHz Receiver
Reichweite auf ~ 400m reduziert, sobald Tarot OSD aktiviert ist.
Bis jetzt bin ich mit meinem Easystar ohne Tarot OSD gefliegen.
Meine FPV Hardware: 5.8GHz Boscam TX TS58200 <== Interface mit LM2596 Step-down-Modul 12V / 5V mit Mikrofon <== Keycam 808 # 16V2
Bis über die Sichtgrenze konnte ich mit meinem Easystar damit fliegen. UHF 433-435MHz LRS-System mit UHF-TX = 10mW.
Diese Woche habe ich das Tarot OSD zwischen TX TS58200 <== Interface in meinem Easystar eingebaut und zuerst Reichweitentest am Boden durchgeführt. Sobald ich das Tarot OSD auf "ON" geschaltet habe ging die Reichweite auf ~ 400m zurück. Ohne Tarot OSD, hatte ich wieder die gewohnte Reichweite.
Nach diesen enttäuschenden Ergebnissen , nahm ich die ganze Elektronik aus dem Easystar heraus und montiert diese auf meinem Basteltisch. Für Reichweitentests zu Hause habe ich die UHF LRS TX Leistung auf 1 mW reduziert und den Sender ausserhalb des Hauses so positioniert, dass Urssi von 3V bis 1.5V reduziert wurde. Mein OrangeRX UHF / LRS-Receiver verfügt über eine rote LED, die blinkt, wenn Signalpakete verloren gehen. Ich stellte den TX in einem solchen Abstand auf, dass diese rote LED gerade noch nicht blinkte.
Die Tests mit und ohne Tarot OSD zeigen die gleichen Ergebnisse wie oben beschrieben. Ohne Tarot OSD kein Einfluss auf Reichweite und mit Tarot OSD die rote LED war permanent auf "ON".
Jetzt trennte ich Empfangspfad vollständig von Video-Pfad mit separater Versorgung beider Pfade. Kein Verbindung von Masse oder Versorgungsleitungen zwischen den beiden Funktionsteile. Die UHF LRS Empfängereinheit mit Servo und Akku war auf einem tragbaren Bord. Sonst gleiche Bedingungen wie vorhin. Diese Reichweitentests zeigten, dass in einem Bereich von weniger als 70 cm zwischen Empfangseinheit und Tarot FPV Einheit, die rote Empfänger-LED zu blinken beginnt und wenn ich weiter die Entfernung reduziere die rote LED "ON" kontinuierlich leuchtet. Das Tarot OSD sendet also so starke Störstrahlung im UHF Band aus, daß die rote Empfänger LED auf Dauerrot schaltet und keine Servosteuerung mehr erfolgt.
Weitere Tests zeigten, dass der Step-down (es scheint ein LT1616 zu sein) auf der Tarot OSD für die Störung verantwortlich ist. Die Schaltzeit ist 0.65us und 10 Vpp Spannungshub mit schnellen Flanken Übergängen (diese Übergänge erzeugen Oberschwingungen bis zur UHF / LRS-Band). Diese starke Strahlung von Störsignalen (wie ein Kammgenerator) machen es schwierig, eine geeignete Abschirmung vor zu sehen. Statt des ON-Bord Schaltreglers des Tarot OSD, verwendete ich eine 7805-Linearregler, um die OSD Elektronik mit 5V zu versorgen. Die Störungen des UHF / LRS-Empfänger traten damit nicht mehr auf und größere Reichweite ist wieder möglich. Dies ist eine einfachere Lösung als ein kompliziertes Abschirmverfahren.
MfG Joe
Hallo Tarot OSD-Anwender,
was ist Eure Erfahrung mit Tarot OSD und UHF-LRS-System? Wie habt Ihr Interferenzprobleme gelöst?
Mein 1-st-Tests mit meinem Easystar im Freien in dieser Woche findet ihr hier:
Tarot OSD verursacht starke UHF Interferenz in den LRS 433-435MHz Receiver
Reichweite auf ~ 400m reduziert, sobald Tarot OSD aktiviert ist.
Bis jetzt bin ich mit meinem Easystar ohne Tarot OSD gefliegen.
Meine FPV Hardware: 5.8GHz Boscam TX TS58200 <== Interface mit LM2596 Step-down-Modul 12V / 5V mit Mikrofon <== Keycam 808 # 16V2
Bis über die Sichtgrenze konnte ich mit meinem Easystar damit fliegen. UHF 433-435MHz LRS-System mit UHF-TX = 10mW.
Diese Woche habe ich das Tarot OSD zwischen TX TS58200 <== Interface in meinem Easystar eingebaut und zuerst Reichweitentest am Boden durchgeführt. Sobald ich das Tarot OSD auf "ON" geschaltet habe ging die Reichweite auf ~ 400m zurück. Ohne Tarot OSD, hatte ich wieder die gewohnte Reichweite.
Nach diesen enttäuschenden Ergebnissen , nahm ich die ganze Elektronik aus dem Easystar heraus und montiert diese auf meinem Basteltisch. Für Reichweitentests zu Hause habe ich die UHF LRS TX Leistung auf 1 mW reduziert und den Sender ausserhalb des Hauses so positioniert, dass Urssi von 3V bis 1.5V reduziert wurde. Mein OrangeRX UHF / LRS-Receiver verfügt über eine rote LED, die blinkt, wenn Signalpakete verloren gehen. Ich stellte den TX in einem solchen Abstand auf, dass diese rote LED gerade noch nicht blinkte.
Die Tests mit und ohne Tarot OSD zeigen die gleichen Ergebnisse wie oben beschrieben. Ohne Tarot OSD kein Einfluss auf Reichweite und mit Tarot OSD die rote LED war permanent auf "ON".
Jetzt trennte ich Empfangspfad vollständig von Video-Pfad mit separater Versorgung beider Pfade. Kein Verbindung von Masse oder Versorgungsleitungen zwischen den beiden Funktionsteile. Die UHF LRS Empfängereinheit mit Servo und Akku war auf einem tragbaren Bord. Sonst gleiche Bedingungen wie vorhin. Diese Reichweitentests zeigten, dass in einem Bereich von weniger als 70 cm zwischen Empfangseinheit und Tarot FPV Einheit, die rote Empfänger-LED zu blinken beginnt und wenn ich weiter die Entfernung reduziere die rote LED "ON" kontinuierlich leuchtet. Das Tarot OSD sendet also so starke Störstrahlung im UHF Band aus, daß die rote Empfänger LED auf Dauerrot schaltet und keine Servosteuerung mehr erfolgt.
Weitere Tests zeigten, dass der Step-down (es scheint ein LT1616 zu sein) auf der Tarot OSD für die Störung verantwortlich ist. Die Schaltzeit ist 0.65us und 10 Vpp Spannungshub mit schnellen Flanken Übergängen (diese Übergänge erzeugen Oberschwingungen bis zur UHF / LRS-Band). Diese starke Strahlung von Störsignalen (wie ein Kammgenerator) machen es schwierig, eine geeignete Abschirmung vor zu sehen. Statt des ON-Bord Schaltreglers des Tarot OSD, verwendete ich eine 7805-Linearregler, um die OSD Elektronik mit 5V zu versorgen. Die Störungen des UHF / LRS-Empfänger traten damit nicht mehr auf und größere Reichweite ist wieder möglich. Dies ist eine einfachere Lösung als ein kompliziertes Abschirmverfahren.
MfG Joe
Tarot OSD Spectrum analyzer tests
Heute habe ich Spektrumanalysator Tests mit meinem LRS -Empfänger durchgeführt.
Das Tarot OSD incl. Vcc Versorgungsanschlüsse hatte ich auf dem Tisch in der Nähe des LRS -Empfängers platziert . Hier meine Testergebnisse für Breitband- und Schmalband Scan.
Gelbe Linie = Referenz = Tarot OSD via GPS 5V Pin Steckverbinder versorgt mit einem 7805 Linear Regulator
Rote Linie = hoch = Tarot OSD via Vcc_In Pins versorgt
Wenn man die Vcc_in Pins des OSD nutzet zur Spannungsversorgung, dann wird der Step-down Regler auf OSD Platine aktiviert.Der Dutycycle dieses Reglers beträgt ca. 0.65us == etwa 1,5 MHz Schaltfrequenz . Leider erzeugt dieser Type von Schaltregler viele Harmonische und Rauschen zwischen den harmonischen Signalen bis in das UHF Band . Mit einem 7805 -Linearregler gibt es keine solche Störsignale.
Meine Lösung ist nun , ohne ON-Bord Schaltregler, da bei diesen Grad der Störsignale ein Schirmung des ganzen OSD Aufbaus sehr schwierig ist, da auch über die Zuleitung die Störstrahlung sich seinen Weg nach aussen sucht.
mfg Joe_F
Heute habe ich Spektrumanalysator Tests mit meinem LRS -Empfänger durchgeführt.
Das Tarot OSD incl. Vcc Versorgungsanschlüsse hatte ich auf dem Tisch in der Nähe des LRS -Empfängers platziert . Hier meine Testergebnisse für Breitband- und Schmalband Scan.
Gelbe Linie = Referenz = Tarot OSD via GPS 5V Pin Steckverbinder versorgt mit einem 7805 Linear Regulator
Rote Linie = hoch = Tarot OSD via Vcc_In Pins versorgt
Wenn man die Vcc_in Pins des OSD nutzet zur Spannungsversorgung, dann wird der Step-down Regler auf OSD Platine aktiviert.Der Dutycycle dieses Reglers beträgt ca. 0.65us == etwa 1,5 MHz Schaltfrequenz . Leider erzeugt dieser Type von Schaltregler viele Harmonische und Rauschen zwischen den harmonischen Signalen bis in das UHF Band . Mit einem 7805 -Linearregler gibt es keine solche Störsignale.
Meine Lösung ist nun , ohne ON-Bord Schaltregler, da bei diesen Grad der Störsignale ein Schirmung des ganzen OSD Aufbaus sehr schwierig ist, da auch über die Zuleitung die Störstrahlung sich seinen Weg nach aussen sucht.
mfg Joe_F
Anhänge
-
 96,7 KB Aufrufe: 15
96,7 KB Aufrufe: 15 -
 83,6 KB Aufrufe: 14
83,6 KB Aufrufe: 14
Man kann das OSD auf die Werkseinstellung zurücksetzen. Dazu muss man wählen
OSD Setting Menue Page 1, Main Menue
dort in die vorletzte Zeile unten gehen dern Kusor setzen, da steht dan
Reset all Set ==> das anwählen
dann noch auf
Exit stellen
und Knopf ==Enter drücken, dann kommt wieder die Original Chinesische Oberfläche.
viel erfolg dann damit!
OSD Setting Menue Page 1, Main Menue
dort in die vorletzte Zeile unten gehen dern Kusor setzen, da steht dan
Reset all Set ==> das anwählen
dann noch auf
Exit stellen
und Knopf ==Enter drücken, dann kommt wieder die Original Chinesische Oberfläche.
viel erfolg dann damit!
Hallo Svenson,
hast Du mal die 5V Spannung auf dem OSD überprüft? Dazu das GPS Modul abstecken und am 2-ten Pin die Spannung messen. Auch ohne GPS Modul hat man eine Anzeige u. einen Warnhinweis, dass das GPS fehlt. Falls Du keine 5V dort hast, kannst von einem 5V BEC die Spannung nehmen oder einen kleinen Aufbau mit 7805 Regler machen und dort die 5V einspeisen, dabei ja nicht an Vin Eingang Spanung anlegen.
Versuchs mal, viel Glück
hast Du mal die 5V Spannung auf dem OSD überprüft? Dazu das GPS Modul abstecken und am 2-ten Pin die Spannung messen. Auch ohne GPS Modul hat man eine Anzeige u. einen Warnhinweis, dass das GPS fehlt. Falls Du keine 5V dort hast, kannst von einem 5V BEC die Spannung nehmen oder einen kleinen Aufbau mit 7805 Regler machen und dort die 5V einspeisen, dabei ja nicht an Vin Eingang Spanung anlegen.
Versuchs mal, viel Glück
- Status
- Nicht offen für weitere Antworten.

