
WiiCopter - Allgemeine Fragen, Probleme, Links, News
- Themenstarter Grandcaravan
- Beginndatum
Eure ACC LEVEL P- und I-Werte interessieren mich. Komm da irgendwie nicht voran und empfinde den ACC-Mode ehr als Behinderung beim Fliegen; mag mich da aber grundlegend täuschen.
Fangen Eure Copter auch stark zu wackeln an, wenn ihr das Gas auf einmal drastisch zurücknehmt und was kann man gegen dieses Wackeln tun?
Gruß Chris
Fangen Eure Copter auch stark zu wackeln an, wenn ihr das Gas auf einmal drastisch zurücknehmt und was kann man gegen dieses Wackeln tun?
Gruß Chris
Karsten J. hat gesagt.:
Eine Reduzierung des P-Wert bei Level und dieses Problem beim Absinken war bei mir gegessen ")
Gruß Karsten
Gruß Karsten
Danke für die Werte, heckmic.
Den Gasregler fahr ich schon mal kurz auf null, wenn ich ihn so richtig absacken lassen will um ihn im nächsten Moment wieder rauf auf 10 Meter Höhe zu scheuchen.
Gruß Chris
Brauchen nochmal eure Hilfe. Möchte mit jetzt auch einen BMP085 einbauen kann mir jemand erklären wie ich den Sensor verbinden Soll.
Am Arduino Mini Pro habe ich 5V das ich mit dem Sparkfun BOB-08745 auf 3.3V herabsetzen möchte um damit den BMP085 betreiben zu können.
Aber leider weiß ich nicht wie ich das ganze verbinden soll.
Gruß Roland
Am Arduino Mini Pro habe ich 5V das ich mit dem Sparkfun BOB-08745 auf 3.3V herabsetzen möchte um damit den BMP085 betreiben zu können.
Aber leider weiß ich nicht wie ich das ganze verbinden soll.
Gruß Roland
Anhänge
-
 98,8 KB Aufrufe: 1
98,8 KB Aufrufe: 1
Eine Frage an die Experten hier im Board.
Wir haben zwei Qaudrocopter nach Anleitung gebaut, fliegen auch soweit gut mit der Firm 1.7-02.
Nach aufspielen der Version 1.8-02 fliegt es sich im Normal-Modus besser (ist nicht so agressiv), im ACC Modus allerdings gerät er immer wieder außer Kontrolle.Die Werte, die beim Trimmen eingestellt werden, werden nicht übernommen.
Beispiel:
er trifftet nach hinten weg- landen- trimmen nach vorn- aber er übernimmt die Werte nicht. Im Gegenteil, hat man das mehrmals gemacht, läßt sich der Quadrocopter kaum noch gerade halten, man muss dann Nick ganz nach vorn drücken, um ihn überhaupt zu starten.
Erst nach ein- und ausschalten sind im ACC überhaupt Starts möglich.
Tritt an zwei unterschiedlichen Quads auf, Fehler ist aber der selbe.
Hat sich hier in der Trimmung in 1.8 etwas verändert?
Jemand eine Idee?
Wir haben zwei Qaudrocopter nach Anleitung gebaut, fliegen auch soweit gut mit der Firm 1.7-02.
Nach aufspielen der Version 1.8-02 fliegt es sich im Normal-Modus besser (ist nicht so agressiv), im ACC Modus allerdings gerät er immer wieder außer Kontrolle.Die Werte, die beim Trimmen eingestellt werden, werden nicht übernommen.
Beispiel:
er trifftet nach hinten weg- landen- trimmen nach vorn- aber er übernimmt die Werte nicht. Im Gegenteil, hat man das mehrmals gemacht, läßt sich der Quadrocopter kaum noch gerade halten, man muss dann Nick ganz nach vorn drücken, um ihn überhaupt zu starten.
Erst nach ein- und ausschalten sind im ACC überhaupt Starts möglich.
Tritt an zwei unterschiedlichen Quads auf, Fehler ist aber der selbe.
Hat sich hier in der Trimmung in 1.8 etwas verändert?
Jemand eine Idee?
@heckmic: Ja, teste ich eh auch immer so. Nur letztens hats in der Hand gepasst, in der Luft hat er sich dann schön hochgeschaukelt.
@Roland: im Wii Copter Komponenten thread ist schon eine genaue Zeichnung wie es angeschlossen gehört.
@dboxuser:
für den ACC-Modus muss der P-Level Wert um einiges gesenkt werden. Der ist jetzt viel aggressiver als vorher.
Das mit der Trimmung weiß ich selbst nicht, bzw. habe darüber noch nichts gelesen.
Ich fliege eigentlich nie im ACC und Trimmung passt von haus aus schon.
Zudem driftet der ACC beim schnellen Fliegen sowieso, da ist die Trimmung ziemlich egal.
@Roland: im Wii Copter Komponenten thread ist schon eine genaue Zeichnung wie es angeschlossen gehört.
@dboxuser:
für den ACC-Modus muss der P-Level Wert um einiges gesenkt werden. Der ist jetzt viel aggressiver als vorher.
Das mit der Trimmung weiß ich selbst nicht, bzw. habe darüber noch nichts gelesen.
Ich fliege eigentlich nie im ACC und Trimmung passt von haus aus schon.
Zudem driftet der ACC beim schnellen Fliegen sowieso, da ist die Trimmung ziemlich egal.
Hallo!
Hab ein Problem:
Der Copter schwingt immer von links nach rechts (YAW). Bei Erhöhung der P-Werte schwingt er schneller, bei Reduzierung langsamer. Mit I und D Werten hab ich auch schon rumexperimentiert. Der schwingt immer von links nach recht oder rechts nach links.
Hat jemand viell. ein Tip, was ich falsch gemacht habe/ falsch mache??
Habs mit und ohne BMA020 probiert...
Version 1.8
Werte
Pitch/Roll : 3 - 0.03 - 13
Weiß grad nicht mehr weiter...
Hab ein Problem:
Der Copter schwingt immer von links nach rechts (YAW). Bei Erhöhung der P-Werte schwingt er schneller, bei Reduzierung langsamer. Mit I und D Werten hab ich auch schon rumexperimentiert. Der schwingt immer von links nach recht oder rechts nach links.
Hat jemand viell. ein Tip, was ich falsch gemacht habe/ falsch mache??
Habs mit und ohne BMA020 probiert...
Version 1.8
Werte
Pitch/Roll : 3 - 0.03 - 13
Weiß grad nicht mehr weiter...
Antro hat gesagt.:
Hallo!
Ich habe seit einiger Zeit einen QuadX Wii Copter. Bisher hat alles einwandfrei funktioniert. Nun habe ich die Programmversion 1.7 raufgeladen und seit dem funktioniert gar nichts mehr. Wenn ich den Copter mit dem Config Programm teste,"wirbelt" das Bild des Copters im Config Tool wild herum. Ich habe negative circle times und komplett unverständliche Werte. Nun habe ich wieder das 1.4 Programm wieder raufgeladen und es passiert dasselbe. Ich habe den Fehler bisher nicht gefunden. Weiß vielleicht jemand von euch was es sein kann?
Gruß
Antro
Ich habe seit einiger Zeit einen QuadX Wii Copter. Bisher hat alles einwandfrei funktioniert. Nun habe ich die Programmversion 1.7 raufgeladen und seit dem funktioniert gar nichts mehr. Wenn ich den Copter mit dem Config Programm teste,"wirbelt" das Bild des Copters im Config Tool wild herum. Ich habe negative circle times und komplett unverständliche Werte. Nun habe ich wieder das 1.4 Programm wieder raufgeladen und es passiert dasselbe. Ich habe den Fehler bisher nicht gefunden. Weiß vielleicht jemand von euch was es sein kann?
Gruß
Antro
Ein Kurzschluss auf dem Board kann es nicht sein. Ohne Regler funktioniert alles einwandfrei (habe auch die Eingänge des Arduino gecheckt). Sobald ich aber die Regler anschließe (HK 20A) drehen die Werte (auch für Throttle und Co.) völlig durch. Es liegt also an den Reglern.
Dass die Werte nicht stimmen solange ich nicht kalibriert habe würde ich ja verstehen. Nicht aber, dass sie so verrückt spielen.
Als ich damals den Copter mit Version 1.5 das erste Mal angeschlossen habe, war das nicht der Fall. Seit damals habe ich lediglich die Regler umprogrammiert (auf die Werte aus dem Tutorial).
Wie kann ich das mit dem Config-Tool oder mittels Source-Code am Besten beheben?
Gruß
Antro
Kann es vielleicht sein, dass die Propeller zu nah beinander stehen, dass vielleicht dadurch das schwingen um die YAW-Achse entsteht? Wäre das möglich?? Mit den Werten hab ich schon rumprobiert - da bekomm' ich das schwingen nicht weg....
thunder1902 hat gesagt.:
Hallo!
Hab ein Problem:
Der Copter schwingt immer von links nach rechts (YAW). Bei Erhöhung der P-Werte schwingt er schneller, bei Reduzierung langsamer. Mit I und D Werten hab ich auch schon rumexperimentiert. Der schwingt immer von links nach recht oder rechts nach links.
Hat jemand viell. ein Tip, was ich falsch gemacht habe/ falsch mache??
Habs mit und ohne BMA020 probiert...
Version 1.8
Werte
Pitch/Roll : 3 - 0.03 - 13
Weiß grad nicht mehr weiter...
Hab ein Problem:
Der Copter schwingt immer von links nach rechts (YAW). Bei Erhöhung der P-Werte schwingt er schneller, bei Reduzierung langsamer. Mit I und D Werten hab ich auch schon rumexperimentiert. Der schwingt immer von links nach recht oder rechts nach links.
Hat jemand viell. ein Tip, was ich falsch gemacht habe/ falsch mache??
Habs mit und ohne BMA020 probiert...
Version 1.8
Werte
Pitch/Roll : 3 - 0.03 - 13
Weiß grad nicht mehr weiter...
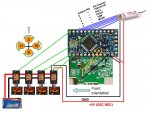
Hi ich weiss net ob ich hier richtig bin... Naja hab ein Problem also sollte ich richtig hier sein.
Ok... habe einen Tri und da muss jetzt der Empfänger dran:
Habe folgende Anschlüsse aufn Empfänger:
1-BND/DATA
2-THRO
3-AILE
4-ELEV
5-RUDO
6-GEAR
7-AUX1
So kann mir bitte jemand bei folgenden Kabeln die Zahlen dazu schreiben wo ich die anschliessen muss:
Motor 1
Motor 2
Motor 3
Gyro
Heck
Gruss Sven
Ok... habe einen Tri und da muss jetzt der Empfänger dran:
Habe folgende Anschlüsse aufn Empfänger:
1-BND/DATA
2-THRO
3-AILE
4-ELEV
5-RUDO
6-GEAR
7-AUX1
So kann mir bitte jemand bei folgenden Kabeln die Zahlen dazu schreiben wo ich die anschliessen muss:
Motor 1
Motor 2
Motor 3
Gyro
Heck
Gruss Sven

