WiiCopter - Allgemeine Fragen, Probleme, Links, News
- Themenstarter Grandcaravan
- Beginndatum
Habe es dir doch gelinkt: http://static.rcgroups.net/forums/attachments/2/6/7/7/0/3/a3627792-152-tri.jpg
Oder hast du ein Tri ohne Arduino? - Dann kann ich es dir auch nicht sagen. Das ist eine Frage wie du das im Sender mischt... und das ist, wenn man es nicht 100% versteht, SAU schwierig! - Dann lieber für kleines Geld auf WiiKopter umbauen.
Oder hast du ein Tri ohne Arduino? - Dann kann ich es dir auch nicht sagen. Das ist eine Frage wie du das im Sender mischt... und das ist, wenn man es nicht 100% versteht, SAU schwierig! - Dann lieber für kleines Geld auf WiiKopter umbauen.
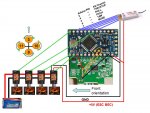
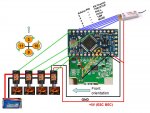
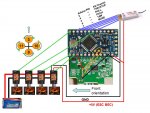
Hab mir jetzt den gesamten Wii Copter Komponenten thread durchgelesen  und dann eine Zeichnung angefertigt wie ich glaube das sie ganzen Sensoren verbunden gehören.
und dann eine Zeichnung angefertigt wie ich glaube das sie ganzen Sensoren verbunden gehören.
Könnte sich das mal ein Wii Copter Profi anschauen und mal gucken ob alles so Funktioniert.
Bräuchte jetzt noch einen Wandler von 5V auf 3,3V was soll man da für einen nehmen bzw. wie viel Watt muss der Aushalten?
Gruß Roland
und dann eine Zeichnung angefertigt wie ich glaube das sie ganzen Sensoren verbunden gehören.Könnte sich das mal ein Wii Copter Profi anschauen und mal gucken ob alles so Funktioniert.
Bräuchte jetzt noch einen Wandler von 5V auf 3,3V was soll man da für einen nehmen bzw. wie viel Watt muss der Aushalten?
Gruß Roland
Anhänge
-
 98,8 KB Aufrufe: 11
98,8 KB Aufrufe: 11
") -Das schafft nicht jeder
-Das schafft nicht jeder
Antro hat gesagt.:
Hallo!
Ich habe seit einiger Zeit einen QuadX Wii Copter. Bisher hat alles einwandfrei funktioniert. Nun habe ich die Programmversion 1.7 raufgeladen und seit dem funktioniert gar nichts mehr. Wenn ich den Copter mit dem Config Programm teste,"wirbelt" das Bild des Copters im Config Tool wild herum. Ich habe negative circle times und komplett unverständliche Werte. Nun habe ich wieder das 1.5 Programm wieder raufgeladen und es passiert dasselbe. Ich habe den Fehler bisher nicht gefunden. Weiß vielleicht jemand von euch was es sein kann?
Gruß
Antro
Ich habe seit einiger Zeit einen QuadX Wii Copter. Bisher hat alles einwandfrei funktioniert. Nun habe ich die Programmversion 1.7 raufgeladen und seit dem funktioniert gar nichts mehr. Wenn ich den Copter mit dem Config Programm teste,"wirbelt" das Bild des Copters im Config Tool wild herum. Ich habe negative circle times und komplett unverständliche Werte. Nun habe ich wieder das 1.5 Programm wieder raufgeladen und es passiert dasselbe. Ich habe den Fehler bisher nicht gefunden. Weiß vielleicht jemand von euch was es sein kann?
Gruß
Antro
(Immer wenn ich Tx und QuadX verbunden habe, sind die Gyro-Werte periodisch zwischen 0 und 200 hin und her gehüpft).
Egal. Nun habe ich wieder 1.5. Alles läuft so weit, die Motoren lassen sich einschalten und die Balken von Throttle, Pitch usw. reagieren auf die Befehle des Transmitters. Allerdings mit einer Einschränkung:
Nur der Wert von Yaw ist wirklich ruhig und reagiert genau auf die Befehle der Fernbedienung. Bei Throttle, Pitch, Roll kann ich zwar mit der Funke vorgeben, dass die Werte höher oder niedriger werden sollen, aber dennoch oszillieren sie wild um diese ungefähren Werte. Woran kann das liegen?
Für jede Hilfe dankbar,
Antro