
Careyer:
Ja, die Logs haben geholfen, ist noch packetloss und out-of-order delivery zu sehen, aber ich bekomme das jetzt hier reproduziert und weiss glaube wie das behoben werden kann.
Ja, die Logs haben geholfen, ist noch packetloss und out-of-order delivery zu sehen, aber ich bekomme das jetzt hier reproduziert und weiss glaube wie das behoben werden kann.
Geht jetzt nur der Uplink nicht wenn RC=ibus eingestellt ist? Ich hatte verstanden, dass dann gar keine Telemetrie mehr geht, auch kein Downlink. Bin noch nicht dazu gekommen das zu testen. Uplink kann ich auch schlecht selbst testen, habe keine entsprechende FC dafür, nur Naze clones. Andererseits bringt RC=ibus mit den default Einstellungen glaube eh' nichts weil der gleiche serielle Port wie für Telemetrie konfiguriert ist, die Kombination geht soweit ich weiss von der FC aus nur mit mavlink RC (sind ja im grunde auch nur Telemetrie Uplink Pakete). Kannst Du mal bitte probieren, für Telemetrie und R/C verschiedene Ports zu nehmen?
Wegen den 16 Channels weiss ich noch nicht genau ob es das in 1.6 final schaffen wird, es soll wohl auch noch eine Möglichkeit geben mit Mavlink irgendwie mehr als 8 Channels zu übertragen, aber ich habe keine Ahnung wie, wenn sich hier jemand damit auskennt, immer her mit den Infos ")
Ich baue momentan einen sehr kleinen Kopter und benötige damit eine sehr kleine aber zugleich voll ausgestatte und leistungsfähige FC. Die Wahl ist hierbei auf den PixRacer gefallen. So toll das Teil auch ist so hat es doch einige Nachteile: RC-Input geht ausschließlich via SBUS (oder MavLink via Serial). Allderings hat die Kiste weil sie eben so Klein ist maximal 2 AUX Channel, wo ich zwein Kanäle von der Funke durchschleifen kann (z.B. zur Gimbal Steurung). In diesem speziellen Fall benötige ich aber 5 AUX Channel. Einzige Lösung: Die AUX Kanäle aus dem Signal vor der FC ausschleifen und an die entsprechende Peripherie führen und den Rest via SBUS in die FC pumpen.
Das ginge mit einem iBUS --> PPM+SBUS Adapter (Link: https://www.banggood.com/de/IBus-To...-Channels-PPM-And-S-Bus-Output-p-1099337.html) super easy =)
Quasi so:
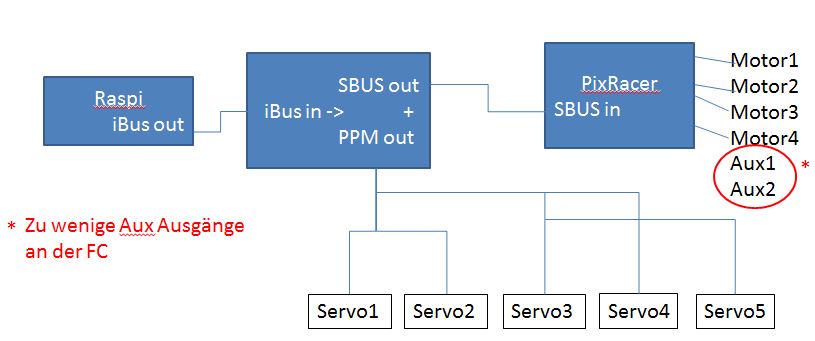
Deshalb habe ich einen Luftsprung gemacht und hing halb unter der Decke als ich gelesen habe, dass du iBus implementiert hast! =) Das nutzt mir in der Situation natürlich nur wenn >8 Kanäle übertragen werden.
Ein Ausschleifen der Kanäle vor der FC aus dem MavLink Serial ist leider nicht so einfach möglich.


