Moin
ein Gedanke dazu:
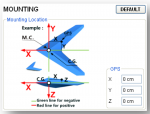
Selbst wenn das GPS genau über NAZA und oder CoG montiert würde, müsste, um der Anleitung zu folgen, doch noch der z-Wert eingestellt werden.
Und eine Frage:
Den Schwerpunkt ausmessen ist eine Sache; dann könnte ich die Werte einstellen. Mir behagt der Gedanke mehr, den Schwerpunkt durch Trimmgewichte in den geometrischen Mittelpunkt (zumindest bei x und y) zu schieben, dort das NAZA FC zu installieren und dann die Position des GPS nach Anleitung einzugeben.
Was tut Ihr? Kopter mit Trimmblei trimmen, Payload gerecht verteilen?
Ohne Kamera bräuchte ich 10 g an einem Arm des F450 um in die Waage zu kommen, wenn der Kopter am Faden hängt. Mein Naza sitzt geometrisch zentral auf der unteren Platte, Empfänger in Flugrichtung hinten, Akku oben quer zur Flugrichtung. Wenn die Kamera auf dem in Flugrichtung zeigenden Ueberstand der unteren Platte sitzt, bräuchte ich zusätzlich je 20 g an jedem hinteren Arm um wieder ins Wasser zu kommen.
Gruss Michael
P.S. Noch eine Frage an die F450-Besitzer: Akku oben oder drunter?
ein Gedanke dazu:
Selbst wenn das GPS genau über NAZA und oder CoG montiert würde, müsste, um der Anleitung zu folgen, doch noch der z-Wert eingestellt werden.
Und eine Frage:
Den Schwerpunkt ausmessen ist eine Sache; dann könnte ich die Werte einstellen. Mir behagt der Gedanke mehr, den Schwerpunkt durch Trimmgewichte in den geometrischen Mittelpunkt (zumindest bei x und y) zu schieben, dort das NAZA FC zu installieren und dann die Position des GPS nach Anleitung einzugeben.
Was tut Ihr? Kopter mit Trimmblei trimmen, Payload gerecht verteilen?
Ohne Kamera bräuchte ich 10 g an einem Arm des F450 um in die Waage zu kommen, wenn der Kopter am Faden hängt. Mein Naza sitzt geometrisch zentral auf der unteren Platte, Empfänger in Flugrichtung hinten, Akku oben quer zur Flugrichtung. Wenn die Kamera auf dem in Flugrichtung zeigenden Ueberstand der unteren Platte sitzt, bräuchte ich zusätzlich je 20 g an jedem hinteren Arm um wieder ins Wasser zu kommen.
Gruss Michael
P.S. Noch eine Frage an die F450-Besitzer: Akku oben oder drunter?
")