Hallo
Um es vorweg zu nehmen, ich habe nur den Mini-Arkbird.
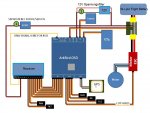
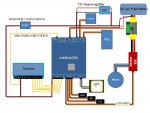
Was mir auffällt, du versorgst den Vogel mit 12V. Gehen da auch 12V dann auf die Servos? Wenn nicht und da 5V rauskommen, warum dann der BEC? Was mir dann auch noch auffällt ist, dass der RX 2x mit Strom versorgt wird. Einmal vom BEC und dann vom Arkbird.
Also, auch den 12V Teil würde ich anders lösen. zB den Stromsensor auch an den Spannungsfilter hängen und nur das Signal direkt auf den Arkbird. Und auch den BEC an den Ausgang vom Spannungsfilter. Hmm vielleicht ist auch nicht ganz klar, was genau wo dort miteinander verbunden werden soll.
Zudem kannst Du ausmessen, ob GND beim Filter und beim BEC durchgängig sind. Sie sollten es eigentlich sein, ausser bei einer galvanischen Trennung.
Aber der wichtigste Teil ist schon getrennt markiert, nämlich das GND vom Arkbird zum ESC. Das wäre dasjenige Kabel, das (zu-)viel Leistung aufnehmen würde.
Vielleicht kann jemand sein Schema posten, der den FC am Start hat.

") !
!