Guten Morgen!
Da hat mir die eigene Faulheit wohl einen Strich durch die Rechnung gemacht!
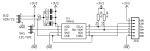
Ich werde VOLT3 mal auf T1 oder T2 umlegen und den Wert dann nochmal auslesen, bzw alle Widerstände möglichst genau messen und dann die Werte mit mstrens Vorgehen ermitteln. Das wäre die sauberste Lösung, da ich mir dann auch die Offsets spare.
Das muss aber ein bisschen warten, da ich erstmal im Urlaub bin!")
Kalle, wäre schön zu hören, ob das so bei dir klappt, wenn Du den Sensor nachgebaut hast.
Gruß
Stefan
Da hat mir die eigene Faulheit wohl einen Strich durch die Rechnung gemacht!
Ich werde VOLT3 mal auf T1 oder T2 umlegen und den Wert dann nochmal auslesen, bzw alle Widerstände möglichst genau messen und dann die Werte mit mstrens Vorgehen ermitteln. Das wäre die sauberste Lösung, da ich mir dann auch die Offsets spare.
Das muss aber ein bisschen warten, da ich erstmal im Urlaub bin!
Kalle, wäre schön zu hören, ob das so bei dir klappt, wenn Du den Sensor nachgebaut hast.
Gruß
Stefan