
AUAV-X2 - Ein echter, kompat. Mini PIXHAWK aus Bulgarien!
- Themenstarter gervais
- Beginndatum
Wenn ich mir das ganze so durchlese, möchte ich eigentlich gar nicht mehr starten 
Wie wäre es wenn jemand ein Powermodul entwirft, sagen wir 15x15mm klein
Eingangsspanung bis 6S, dann für den AUAV-X2 seine 5V zur verfügung stellt.
Als Anschlussbasis sollten, GPS mit oder ohne Mag, Telemetrie und/oder Bluetooth,
Airspeed etc... sauber mitversorgt werden.
Das muss sich doch irgendwie Störungsfrei hinbringen lassen und sauber ist die Lösung auch.
Weil anscheinend können das die aktuellen Powermodule aus China ja nicht!
Was ist nun zu tun?
Wie wäre es wenn jemand ein Powermodul entwirft, sagen wir 15x15mm klein
Eingangsspanung bis 6S, dann für den AUAV-X2 seine 5V zur verfügung stellt.
Als Anschlussbasis sollten, GPS mit oder ohne Mag, Telemetrie und/oder Bluetooth,
Airspeed etc... sauber mitversorgt werden.
Das muss sich doch irgendwie Störungsfrei hinbringen lassen und sauber ist die Lösung auch.
Weil anscheinend können das die aktuellen Powermodule aus China ja nicht!
Was ist nun zu tun?
Zunächst einmal:
Das Problem ist, dass sämtliche Schaltregler kleine Schmutzfinken sind und sämtliche Linearregler kleine Minigrills.
Billig, klein, störungsfrei und effizient gibt es halt nicht.
Daher gehen wir im Low End Bereich Kompromisse ein, die Profis die Haare zu Berge stehen lassen.
Funktioniert aber trotzdem, i.d.R. problemlos. Trotz gewürfelter Komponentenauswahl.
PS: Nick hat dran gedacht, ein perfektes Powerboard zu konzipieren, aber ich habe abgeraten, da eine (eher hochpreisige ) Versorgung angesichts billiger Alternativen eher gar keine Chance am Markt hat. Bei einer Kundschaft, die vorzugsweise ESC BEC frittiert oder den billigsten Schaltregler kauft, um 5€ zu sparen, keine Chance.
Nun mal keine Panik. So schlecht ist das auch nicht. Die normalen billig BEC aus China die meist benutzt werden sind meist noch um Faktor 10 schlechter.
.....
.....
Billig, klein, störungsfrei und effizient gibt es halt nicht.
Daher gehen wir im Low End Bereich Kompromisse ein, die Profis die Haare zu Berge stehen lassen.
Funktioniert aber trotzdem, i.d.R. problemlos. Trotz gewürfelter Komponentenauswahl.
PS: Nick hat dran gedacht, ein perfektes Powerboard zu konzipieren, aber ich habe abgeraten, da eine (eher hochpreisige ) Versorgung angesichts billiger Alternativen eher gar keine Chance am Markt hat. Bei einer Kundschaft, die vorzugsweise ESC BEC frittiert oder den billigsten Schaltregler kauft, um 5€ zu sparen, keine Chance.
Zunächst einmal:
Das Problem ist, dass sämtliche Schaltregler kleine Schmutzfinken sind und sämtliche Linearregler kleine Minigrills.
Billig, klein, störungsfrei und effizient gibt es halt nicht.
Daher gehen wir im Low End Bereich Kompromisse ein, die Profis die Haare zu Berge stehen lassen.
Funktioniert aber trotzdem, i.d.R. problemlos. Trotz gewürfelter Komponentenauswahl.
PS: Nick hat dran gedacht, ein perfektes Powerboard zu konzipieren, aber ich habe abgeraten, da eine (eher hochpreisige ) Versorgung angesichts billiger Alternativen eher gar keine Chance am Markt hat. Bei einer Kundschaft, die vorzugsweise ESC BEC frittiert oder den billigsten Schaltregler kauft, um 5€ zu sparen, keine Chance.
Das Problem ist, dass sämtliche Schaltregler kleine Schmutzfinken sind und sämtliche Linearregler kleine Minigrills.
Billig, klein, störungsfrei und effizient gibt es halt nicht.
Daher gehen wir im Low End Bereich Kompromisse ein, die Profis die Haare zu Berge stehen lassen.
Funktioniert aber trotzdem, i.d.R. problemlos. Trotz gewürfelter Komponentenauswahl.
PS: Nick hat dran gedacht, ein perfektes Powerboard zu konzipieren, aber ich habe abgeraten, da eine (eher hochpreisige ) Versorgung angesichts billiger Alternativen eher gar keine Chance am Markt hat. Bei einer Kundschaft, die vorzugsweise ESC BEC frittiert oder den billigsten Schaltregler kauft, um 5€ zu sparen, keine Chance.
... die Ausfall Sicherheit geht doch vor... in welchen Verhältnis zu den jetzigen Kosten ist den "hochpreisig" ... spricht man da von Faktor 3 oder 10 oder... Ich glaube zu wissen, bei all der Arbeit da bestimmt nicht gespart werden soll.. hmmm, aber ich denke doch nicht als einziger so...??
Ich blick immer noch nicht durch
So ich habe ein Powermodul (klick mich). Das Powermodul verwende ich
auch auf meinem Pixhawk. Mein Pixhawk versorgt, Telemetrie und GPS/Mag, ext. USB/LED und eine zweite Telemetrieeinheit.
OSD wird extern über einen Stepdown mit 12V versorgt. FPV hat einen seperaten Stromkreis.
So hatte ich das eigentlich auch mit dem AUAV-X2 vor. Muss oder soll ich jetzt an den Stecker der zum AUAV geht
das Teil zwischenlöten? Oder soll ich mir ein Blech besorgen, damit das kleine Modul einhülen und an Masse erden?
Oder habe ich nur alles falsch verstanden?
Grüße
ben_
So ich habe ein Powermodul (klick mich). Das Powermodul verwende ich
auch auf meinem Pixhawk. Mein Pixhawk versorgt, Telemetrie und GPS/Mag, ext. USB/LED und eine zweite Telemetrieeinheit.
OSD wird extern über einen Stepdown mit 12V versorgt. FPV hat einen seperaten Stromkreis.
So hatte ich das eigentlich auch mit dem AUAV-X2 vor. Muss oder soll ich jetzt an den Stecker der zum AUAV geht
das Teil zwischenlöten? Oder soll ich mir ein Blech besorgen, damit das kleine Modul einhülen und an Masse erden?
Oder habe ich nur alles falsch verstanden?
Grüße
ben_
Zunächst einmal:
Nick hat dran gedacht, ein perfektes Powerboard zu konzipieren, aber ich habe abgeraten, da eine (eher hochpreisige ) Versorgung angesichts billiger Alternativen eher gar keine Chance am Markt hat. Bei einer Kundschaft, die vorzugsweise ESC BEC frittiert oder den billigsten Schaltregler kauft, um 5€ zu sparen, keine Chance.
Nick hat dran gedacht, ein perfektes Powerboard zu konzipieren, aber ich habe abgeraten, da eine (eher hochpreisige ) Versorgung angesichts billiger Alternativen eher gar keine Chance am Markt hat. Bei einer Kundschaft, die vorzugsweise ESC BEC frittiert oder den billigsten Schaltregler kauft, um 5€ zu sparen, keine Chance.
"Sie funktionieren ja auch", kriege ich von vielen Bekannten zu hören, die teils Hubschrauber (3000.-€) und Großsegler (2000.-€) fliegen!
! Billig aus China ist geil !!!

Nebenbei:
Letzte Woche hat sich ein Bekannter von mir einen 12V zu USB 5V/2A Autoadapter für 1,45
€ gekauft und zerlegt und benutzt diese "Elektronik" im Segler als BEC !
Zuletzt bearbeitet:
@ ben_, terry, ich werde mich zum Thema nicht mehr äussern.
Ich fliege alle meine PX, auch den AUAV-X2, wie hier in Post #1 beschrieben. Seit Ende 2013 ohne Hardware Probleme mit der jeweilig aktuellen Beta.. Nein, ich kenne auch keinen LSM303D failing in Flight und keine tote MPU. Ich könnte noch nicht einmal zum Thema NAZA FlyAway weiterhelfen.
Ich bin mir aber sicher, dass unser Brandstifter (Das ist nicht böse gemeint) Euch weiter aushilft.
Ich fliege alle meine PX, auch den AUAV-X2, wie hier in Post #1 beschrieben. Seit Ende 2013 ohne Hardware Probleme mit der jeweilig aktuellen Beta.. Nein, ich kenne auch keinen LSM303D failing in Flight und keine tote MPU. Ich könnte noch nicht einmal zum Thema NAZA FlyAway weiterhelfen.
Ich bin mir aber sicher, dass unser Brandstifter (Das ist nicht böse gemeint) Euch weiter aushilft.
Hey, das bin ich aber nun nicht ganz glücklich ... die Ausfall Sicherheit geht doch vor... [...]
Ich glaube zu wissen, bei all der Arbeit da bestimmt nicht gespart werden soll.. hmmm, aber ich denke doch nicht als einziger so...??
... die Ausfall Sicherheit geht doch vor... [...] Ich glaube zu wissen, bei all der Arbeit da bestimmt nicht gespart werden soll.. hmmm, aber ich denke doch nicht als einziger so...??
Wenn er im weitesten Sinne nur als Spielzeug-/Freizeitkopter eingesetzt wird, dann kann man schon mal sparen; wenn er runterfällt, wird er eben einfach wieder zusammengebastelt (es heißt ja ModellBAU).
Willst du ihn aber kommerziell, besonders in der Nähe von Personen und/oder Ansammlungen solchiger einsetzen wollen, dann ist natürlich nur das Beste schlechthin gut genug.
Das ist zwar kein Garant dafür, dass das Teilchen nicht doch mal vom Himmel fällt, aber zumindestens kannst du dann nachweisen, dass es nicht am Spartrieb lag.
Hi guys,
Do I see some panic?....please don't!
There could be many reasons for the RIGOL readings ( although 48mV is quite good if many preipherals connected ):
1. USB ground pushes a lot of noise from the PC;
2. Almost most of the telemetry modules generate a lot of noise;
3. Poor ground loops can lead to the same.
So, to investigate the situation I suggest the following:
1. Show me your wiring, but exactly as it was during measurements;
2. Disconnect the USB and measure again, but push MEASURE button to see the measured Vp-p;
3. Perform the same measurements over the 3V3 of the GPS module;
4. Disconnect the noisy peripherals such as OSD, Telemetry and Video Tx and measure again.
About redundancy ( if you really really need it ), you'd better use some good 6V BEC over one of the servo outputs. You can use it simultaneously with your Power Brick....no problem. There are 2 x 2A Schottky ORing diodes which make this possible. Thus just the higher voltage supply will work, while the other will be the redundancy one. If the lower supply fail, the other will take care of the system without noticeable switching.
If you have any other worries, please ask here or on private.
Best regards
Nick
Do I see some panic?....please don't!
There could be many reasons for the RIGOL readings ( although 48mV is quite good if many preipherals connected ):
1. USB ground pushes a lot of noise from the PC;
2. Almost most of the telemetry modules generate a lot of noise;
3. Poor ground loops can lead to the same.
So, to investigate the situation I suggest the following:
1. Show me your wiring, but exactly as it was during measurements;
2. Disconnect the USB and measure again, but push MEASURE button to see the measured Vp-p;
3. Perform the same measurements over the 3V3 of the GPS module;
4. Disconnect the noisy peripherals such as OSD, Telemetry and Video Tx and measure again.
About redundancy ( if you really really need it ), you'd better use some good 6V BEC over one of the servo outputs. You can use it simultaneously with your Power Brick....no problem. There are 2 x 2A Schottky ORing diodes which make this possible. Thus just the higher voltage supply will work, while the other will be the redundancy one. If the lower supply fail, the other will take care of the system without noticeable switching.
If you have any other worries, please ask here or on private.
Best regards
Nick
Zuletzt bearbeitet:
Hi!
Ich habe heute endlich mein miniHawk bekommen und bin gleich auf ein Problem gestoßen: Ich bekomme keine USB Verbindung hin.
Ich habe einen Mac aber mit meinem alten MegaPirateNG hat alles super funktioniert.
Das Flashen der neuesten Firmware per APM Planner hat auch beim miniHawk geklappt, allerdings war's das auch schon. Es steht zwar "connected" da aber ich kann weder mit dem APM Planner noch mit GCS z.B. etwas einstellen oder Sensor-Daten auslesen. Ich habe sämtliche Baud-Raten (eigentlich müsste es doch 115200 sein) und mehrere USB Kabel ausprobiert. Leider ohne Erfolg.
Mache ich etwas falsch, hattet ihr schon mal so ein Problem oder habt ihr sonst eine Idee was ich tun kann?
Vielen Dank,
Simon
Ich habe heute endlich mein miniHawk bekommen und bin gleich auf ein Problem gestoßen: Ich bekomme keine USB Verbindung hin.
Ich habe einen Mac aber mit meinem alten MegaPirateNG hat alles super funktioniert.
Das Flashen der neuesten Firmware per APM Planner hat auch beim miniHawk geklappt, allerdings war's das auch schon. Es steht zwar "connected" da aber ich kann weder mit dem APM Planner noch mit GCS z.B. etwas einstellen oder Sensor-Daten auslesen. Ich habe sämtliche Baud-Raten (eigentlich müsste es doch 115200 sein) und mehrere USB Kabel ausprobiert. Leider ohne Erfolg.
Mache ich etwas falsch, hattet ihr schon mal so ein Problem oder habt ihr sonst eine Idee was ich tun kann?
Vielen Dank,
Simon
Ich hab den Thread jetzt mal überflogen. Ich hätte nur ne Frage zur Zuverlässigkeit: klappt das alles soweit? ich hatte sicher schon 5 APM keiner hat mich so recht überzeugt..(waren sogar alles Originale). war so das Blinkersyndrom: Geht geht nicht. Ich möchte mir so einen holen für einen Flächenflieger. Seit ihr zufrieden? Ausfälle etc?
Gruß Robert
Gruß Robert
Das Flashen der neuesten Firmware per APM Planner hat auch beim miniHawk geklappt, allerdings war's das auch schon. Es steht zwar "connected" da aber ich kann weder mit dem APM Planner noch mit GCS z.B. etwas einstellen oder Sensor-Daten auslesen. Ich habe sämtliche Baud-Raten (eigentlich müsste es doch 115200 sein) und mehrere USB Kabel ausprobiert. Leider ohne Erfolg.
Mache ich etwas falsch, hattet ihr schon mal so ein Problem oder habt ihr sonst eine Idee was ich tun kann?
Mache ich etwas falsch, hattet ihr schon mal so ein Problem oder habt ihr sonst eine Idee was ich tun kann?
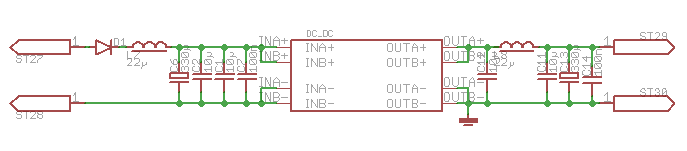
Ich wollte hier auf keinen Fall "unruhe stiften". Aber wenn man nicht unbedingt einen Low Cost copter baut sollte man auf jeden fall ein paar minuten Zeit investieren und sich damit befassen wie man am effektivsten Strörungen vermeidet und nicht hinterher drum rum baut (geschirmte Kabel, riesige Abstände der Komponenten usw.) eine richtige empfehlung kann ich nicht geben, da ich so etwas meist selbst designe und da ist man schnell mal bei > 10EUR pro BEC.
Gute Erfahrungen habe ich damit gemacht: http://www.ti.com/product/tps54386/description
Brauchbare ergebnisse kann man auch damit erreichen (mach ich auch oft) wenn man richtig filtert.
http://www.ebay.de/itm/171366746667
Gute Erfahrungen habe ich damit gemacht: http://www.ti.com/product/tps54386/description
Brauchbare ergebnisse kann man auch damit erreichen (mach ich auch oft) wenn man richtig filtert.
http://www.ebay.de/itm/171366746667
Zuletzt bearbeitet:
Hallo, kannst Du mir eine Empfehlung geben, die auf persönlicher Erfahrung basiert?
Ich löte die ESC-BEC immer sauber aus.
Ich brauche saubere 5v für FPV- Krams und die Topcam.
Danke, Dirk
Ich löte die ESC-BEC immer sauber aus.
Ich brauche saubere 5v für FPV- Krams und die Topcam.
Danke, Dirk
Hier ist eine etwas stärkere Variante die geschirmt ist:


