Ich weiss wieder warum ich die fc noch empfehle....der gute service ") hatte gestern und heute wieder kontakt zu nick.
hatte gestern und heute wieder kontakt zu nick.
Es geht um folgendes:
http://copter.ardupilot.com/wiki/common-servo/
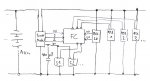
Wie man sieht muss man um servos per passthrough zu steuern diese mit einem bec füttern. Ich möchte meine fpv cam pan/tilten. Im original gibt man es aufs aux. Nur wie löst man es sauber hier?
Es sind nur die aux signale rausgeführt. Nick hat mir eine Lösung präsentiert mit pins anlöten. Aber ich habs nicht ganz verstanden. Kann aber bei bedarf seine variante verschicken. Da ich nur einen quad verwende, haben wir für mich noch eine Lösung gefunden. Man kann das ubec auf einen motorausgang geben...8 zum beispiel. Dann kann man die servoversorgung von 7und 6 abgreifen.
In diesem Zusammenhang kam dann der von gervais gepostete Hinweis mit dem ground abgreifen.
Und ergänzend von nick sehr eindringlich bei den motorreglern kein plus mehr anzuschliessen. Signal geht dann ganz normal auf aux.
Warum ich kein sbus nehme?
Ich verwende den d4r-ii als summe weil bei diesem das frsky telemetrie protokoll zur taranis ohne teensy unterstützt wird.
Ich hoffe das hilft wem weiter.
hatte gestern und heute wieder kontakt zu nick.Es geht um folgendes:
http://copter.ardupilot.com/wiki/common-servo/
Wie man sieht muss man um servos per passthrough zu steuern diese mit einem bec füttern. Ich möchte meine fpv cam pan/tilten. Im original gibt man es aufs aux. Nur wie löst man es sauber hier?
Es sind nur die aux signale rausgeführt. Nick hat mir eine Lösung präsentiert mit pins anlöten. Aber ich habs nicht ganz verstanden. Kann aber bei bedarf seine variante verschicken. Da ich nur einen quad verwende, haben wir für mich noch eine Lösung gefunden. Man kann das ubec auf einen motorausgang geben...8 zum beispiel. Dann kann man die servoversorgung von 7und 6 abgreifen.
In diesem Zusammenhang kam dann der von gervais gepostete Hinweis mit dem ground abgreifen.
Und ergänzend von nick sehr eindringlich bei den motorreglern kein plus mehr anzuschliessen. Signal geht dann ganz normal auf aux.
Warum ich kein sbus nehme?
Ich verwende den d4r-ii als summe weil bei diesem das frsky telemetrie protokoll zur taranis ohne teensy unterstützt wird.
Ich hoffe das hilft wem weiter.