
STorM32 BGC: 3-Achsen STM32 Brushless Gimbal Controller
- Themenstarter OlliW
- Beginndatum
und das aktuelle Tower als fortgeschritten zu bezeichnen ist IMHO auch mutig ... noch fehlt da ja nahezu alles (auch das was es schon mal gab, aber wird ja alles wieder kommen, irgendwann)
Die Winkelberechung sollte IMHO unbedingt in der FC passieren, damit das Gimbal auch per Wegpunkt auf bestimmte Objekte gerichtet werden kann. Wenn ich ein paar Kreise um ein Windrad auf Video aufnehmen möchte, würde ich ungern erst hochklettern, um dort ein Smartphone zu verstecken
 - nur mal so als blödes, konstruertes und hinkendes Beispiel...
- nur mal so als blödes, konstruertes und hinkendes Beispiel...
Wenn ich ein paar Kreise um ein Windrad auf Video aufnehmen möchte, würde ich ungern erst hochklettern, um dort ein Smartphone zu verstecken - nur mal so als blödes, konstruertes und hinkendes Beispiel...

Der einzige Nachteil ist, dass man immer eine Verbindung zum Handy braucht, auch wenn man ein fixe Position tracken möchte.
So wie ich das jetzt verstanden habe, will Olli die Berechnung in das STorM mit einbauen oder?
Zuletzt bearbeitet:
So wie ich das jetzt verstanden habe, will Olli die Berechnung in das STorM mit einbauen oder?
allerdings braucht man dann immer eine FC, wenn's im STorM32 wäre könnte man einfach per Telemetrie die Daten von nem externen GPS bekommen, noch nen GPS ans STorM32, und fertig ... allerdings ist das offensichtlich noch Zukunft denn dazu müüst eman das Board so designen dass man alle UARTS auch nutzt (ich ärgere mich grün und blau dass ich damals nicht wenigstes Solder-Pads an den noch verfügbaren UART gelegt habe) ... im Moment setze ich ganz klar darauf die Berechnung den FC machen zu lassen
Ich habe ein kleines Problem mit dem Controller.
Manchmal fängt der Gimbal mitten im Flug an in alle Richtungen Wild zu rotieren.
Wenn man den Gimbal dann von der Versorgung trennt und neu startet geht wieder alles.
Gibt es eine Möglichkeit irgendwie eine paar mögliche Fehlerquellen auszuschließen?
In der Hand bzw. beim testen passiert das nicht, auch nicht nach 20min. Am Copter teilweise nach 5min, mal nach 10min.
Manchmal fängt der Gimbal mitten im Flug an in alle Richtungen Wild zu rotieren.
Wenn man den Gimbal dann von der Versorgung trennt und neu startet geht wieder alles.
Gibt es eine Möglichkeit irgendwie eine paar mögliche Fehlerquellen auszuschließen?
In der Hand bzw. beim testen passiert das nicht, auch nicht nach 20min. Am Copter teilweise nach 5min, mal nach 10min.
aber ab heute Nacht zumindest in Meiner
(wenn es denn sein muss und es sonst keiner in die Hand nimmt LOL)
(wenn es denn sein muss und es sonst keiner in die Hand nimmt LOL)
Vllt. hat der AQ ja noch Rechenzeit dafür übrig? Zumindest hat er im Ansatz ja schon, was gebraucht wird. POI, follow me, Gimbal pass-through, Trigger-Port... Hat nur in der Kombination noch niemand zusammen geführt.
@ digaus: unser Teammitglied Menno hatte vor Äonen mal eine GPS Groundreference gebaut. Im Prinzip kleiner als ein Smartfon, aber mit dicker aktiver Antenne, womit man den Spot auf einen Quadratmeter eindampfen kann.
Mit heutigen Mitteln müsste man da eigentlich was präziseres hinbekommen, als jedes Smartfon das leisten kann.
Mikrokopter hatte das auch für POI und follow me...
Ich habe ein kleines Problem mit dem Controller.
Manchmal fängt der Gimbal mitten im Flug an in alle Richtungen Wild zu rotieren.
Wenn man den Gimbal dann von der Versorgung trennt und neu startet geht wieder alles.
Gibt es eine Möglichkeit irgendwie eine paar mögliche Fehlerquellen auszuschließen?
In der Hand bzw. beim testen passiert das nicht, auch nicht nach 20min. Am Copter teilweise nach 5min, mal nach 10min.
Manchmal fängt der Gimbal mitten im Flug an in alle Richtungen Wild zu rotieren.
Wenn man den Gimbal dann von der Versorgung trennt und neu startet geht wieder alles.
Gibt es eine Möglichkeit irgendwie eine paar mögliche Fehlerquellen auszuschließen?
In der Hand bzw. beim testen passiert das nicht, auch nicht nach 20min. Am Copter teilweise nach 5min, mal nach 10min.
Wenn nich, würd ich auf die IMU tippen. Mit ner Bluetooth Telemetrie im Flug könntest Du dem auf die Spur kommen...
Das Thema hat Dich offenbar rattenscharf gemacht
aber langsam fallen die Puzzleteile zusammen
und das digaus genau jetzt in die gleiche Richtung geht ist natürlich ein sehr nützlicher glüklicher Zufall ... da braucht er nur noch bald nen *Hawk
Zuletzt bearbeitet:
Kontrollier mal, ob da irgendwas heiss wird auf dem Board.
Wenn nich, würd ich auf die IMU tippen. Mit ner Bluetooth Telemetrie im Flug könntest Du dem auf die Spur kommen...
Wenn nich, würd ich auf die IMU tippen. Mit ner Bluetooth Telemetrie im Flug könntest Du dem auf die Spur kommen...
Die habe ich jetzt erst mal entfernt, da auf dem Storm32 ja schon 2K2 als Pullup sind. Das war wahrscheinlich zu viel des guten. Auch wenn ich die Pegel nicht weiter kontrolliert habe.
Jetzt muss erst mal wieder schönes Wetter kommen bevor ich testen kann
.
Hallo ihr,
ich brauche eure Hilfe, damit ich meinen Jochstick in betrieb nehmen kann bzw. zum funktionieren bekomme.
Ich habe mir den Arduino AVR PIC d Joystick besorgt.
Mit Hilfe des Wikis habe ich die entsprechenden Anschlüsse herausgesucht:
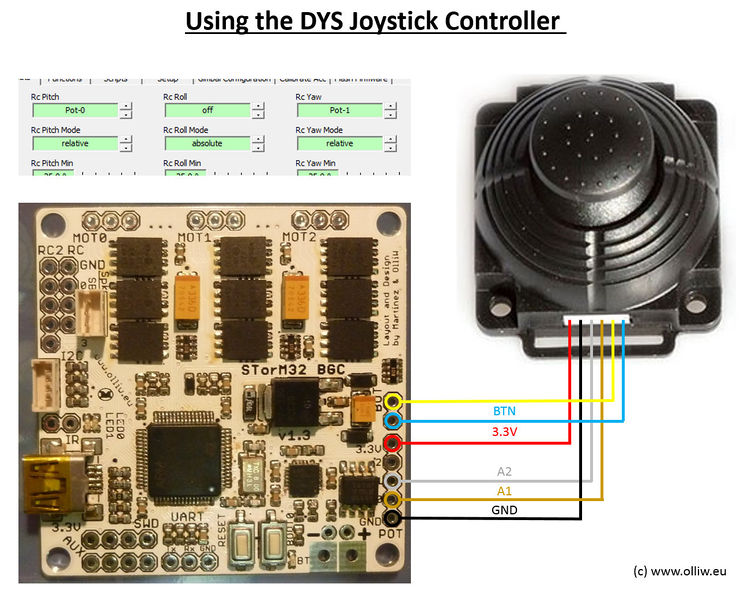
Im Anhang findet ihr ein Bild von meinem Joystick. Von Oben nach unten lauten die Anschlüsse daran:
Gnd --> GND
VRx --> A1
VRy --> A2
SW --> "A3" Anschlus direkt über A2
+5V --> 3,3V
Ich vermute das Problem liegt daran, dass mein Joystick 5V benötigt und das Board mir nur 3,3 V zur Verfügung stellt.
Ist das korrekt oder habe ich einen anderen Fehler begangen?
P.S.: Natürlich habe ich in der Software die RC-Inputs auf Pot0 bzw. 1 gestellt.
ich brauche eure Hilfe, damit ich meinen Jochstick in betrieb nehmen kann bzw. zum funktionieren bekomme.
Ich habe mir den Arduino AVR PIC d Joystick besorgt.
Mit Hilfe des Wikis habe ich die entsprechenden Anschlüsse herausgesucht:
Im Anhang findet ihr ein Bild von meinem Joystick. Von Oben nach unten lauten die Anschlüsse daran:
- Gnd
- +5V
- VRx
- VRy
- Sw
Gnd --> GND
VRx --> A1
VRy --> A2
SW --> "A3" Anschlus direkt über A2
+5V --> 3,3V
Ich vermute das Problem liegt daran, dass mein Joystick 5V benötigt und das Board mir nur 3,3 V zur Verfügung stellt.
Ist das korrekt oder habe ich einen anderen Fehler begangen?
P.S.: Natürlich habe ich in der Software die RC-Inputs auf Pot0 bzw. 1 gestellt.
Anhänge
-
 1,7 MB Aufrufe: 30
1,7 MB Aufrufe: 30
Was ist hier durchgebrannt? Und warum?
Da ist man gerade nichts ahnend am einstellen seines neuen Controllers und plötzlich gibt es einen hellen Blitz am Board. Ohne Vorwarnung oder dass in dem Moment etwas geändert wurde.
Welches der drei Teile bei mir durchgebrannt? Habe es von Goodluckbuy. Kann man da was reparieren?

Akku wurde sofort getrennt aber bis ich den USB-Stecker raus hatte, hat es noch paar Sekunden gedauert, solange hatten die beiden LEDs auch noch nach dem Blitz geleuchtet.
Da ist man gerade nichts ahnend am einstellen seines neuen Controllers und plötzlich gibt es einen hellen Blitz am Board. Ohne Vorwarnung oder dass in dem Moment etwas geändert wurde.
Welches der drei Teile bei mir durchgebrannt? Habe es von Goodluckbuy. Kann man da was reparieren?
Akku wurde sofort getrennt aber bis ich den USB-Stecker raus hatte, hat es noch paar Sekunden gedauert, solange hatten die beiden LEDs auch noch nach dem Blitz geleuchtet.
Zuletzt bearbeitet:
Hab mal geguckt, der Schraubkopf steht etwas drüber. Hatte ich trotzdem nicht bemerkt. Wenn ich die Schraube löse und locker gegen das Bauteil drücke, berührt sie nur einen Pol. Ganz ausschließen kann ich es natürlich trotzdem nicht. Hatte auch nur 12V angeschlossen. GUI über USB 5V geht noch aber an 12V geht nichts mehr.
Ich hatte vorher schon das Problem, dass das Configure Gimbal Tool immer bei "STATE is LEVEL" stehen geblieben ist.
@EagleFly ist von Goodluckbuy
Ich hatte vorher schon das Problem, dass das Configure Gimbal Tool immer bei "STATE is LEVEL" stehen geblieben ist.
@EagleFly ist von Goodluckbuy
Zuletzt bearbeitet:
Kann mir jemand mit meinem Problem helfen, was ich weiter oben gepostet habe?
http://fpv-community.de/showthread....bal-Controller&p=793627&viewfull=1#post793627
http://fpv-community.de/showthread....bal-Controller&p=793627&viewfull=1#post793627
Ich habe zwar noch nie ein Joystick angeschlossen, aber so ein Joystick besteht doch eigentlich nur aus Potis. Von daher müsste 3.3V ausreichen und 5V darf dann nicht angeschlossen werden!!!
Schließe GND und 3v3 des Joysticks nochmal an und miss die Spannung an den VRx und VRy Pins. Wenn du den Joystick bewegst sollte sich die Spannung dort ändern.(wahrscheinlich von 0V-3.3V)
The voltage on the POT and BUT pins must not exceed 3.3 V.

