
FrSky Taranis - kurze Frage, kurze Antwort
- Themenstarter Chriss_:)
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Hallo zusammen,
wie hier (Beitrag #1614):
schon mal beschrieben, beiße ich mir die Zähne an einer Kanal- Schaltverlangsamung aus. Mittlerweile habe ich companion 2.1.7 installiert und meinen "Testheli" soweit programmiert. Das oben beschriebene Problem bleibt das selbe: Nach dem virtuellen Betätigen des Tasters SH wird der Pitch schlagartig auf den gewollten Wert geschoben, nicht wie gewünscht etwas langsamer und damit weicher. Sind die Einstellungen (zweite Zeile auf CH6) so überhaupt richtig, bzw. wo müsste ich ändern?
Gruß, der Ronny
wie hier (Beitrag #1614):
ich fliege ausschließlich Helis und die bis jetzt (seit einigen Jahren) mit einer Futaba T8FG. Nun soll ein modernerer Sender mit Telemetrie her, die Horus (wahrscheinlich dolle überdimensioniert für die paar Funktionen, die ich brauche) soll es dann werden. Also lerne ich seit ein paar Tagen mittels Companion9x die Programmierung einer solchen Anlage.
Ich habe mich soweit durchgebissen, das erste FBL-Modell funktioniert soweit am Simulator. Eine Sache bekomme ich nicht hin: Ich möchte für meine FBL-Systeme (msh Brain) eine Art Rettungsfunktion programmieren. Bei einem Zug am Taster SH dreht sich der Heli automatisch in die Horizontale, das wird über eine Speicherbank im FBL realisiert. Nun aber soll der Pitch nach einer Verzögerung von 0,5 Sekunden auf einen festgelegten Wert fahren (damit der Heli, nachdem er horizontal liegt) leicht nach oben steigt, ohne daß man auf den Pitch am Knüppel achten muss. Das (also die Zeitverzögerung und den Pitchwert) hab ich über einen Mischer auch hinbekommen. Nun soll aber die Servobewegung zum festen Pitchwert nicht schlagartig erfolgen, sondern auch über eine kleine halbe Sekunde. Daran knobele ich schon eine Weile... egal welchen Wert ich bei "Langsam" im Mischer eintrage, der Pitchwert wird schlagartig erreicht. Kann jemand helfen?
Gruß, der Ronny
Ich habe mich soweit durchgebissen, das erste FBL-Modell funktioniert soweit am Simulator. Eine Sache bekomme ich nicht hin: Ich möchte für meine FBL-Systeme (msh Brain) eine Art Rettungsfunktion programmieren. Bei einem Zug am Taster SH dreht sich der Heli automatisch in die Horizontale, das wird über eine Speicherbank im FBL realisiert. Nun aber soll der Pitch nach einer Verzögerung von 0,5 Sekunden auf einen festgelegten Wert fahren (damit der Heli, nachdem er horizontal liegt) leicht nach oben steigt, ohne daß man auf den Pitch am Knüppel achten muss. Das (also die Zeitverzögerung und den Pitchwert) hab ich über einen Mischer auch hinbekommen. Nun soll aber die Servobewegung zum festen Pitchwert nicht schlagartig erfolgen, sondern auch über eine kleine halbe Sekunde. Daran knobele ich schon eine Weile... egal welchen Wert ich bei "Langsam" im Mischer eintrage, der Pitchwert wird schlagartig erreicht. Kann jemand helfen?
Gruß, der Ronny
Gruß, der Ronny
Anhänge
-
 200,8 KB Aufrufe: 42
200,8 KB Aufrufe: 42
Hallo Helle,
dank' dir. Habe nun die Mischerquelle auf den Schalter SH gelegt. Verzögerung funktioniert nun, das Anfahren des Pitch-Sollwertes geht nun auch langsam. Allerdings springt der Kanal nach der Verzögerung schlagartig auf 0 und fährt dann langsam den Sollwert an. Prinzipiell ist es so vielleicht sogar besser, trotzdem möchte ich verstehen, warum die Funktion bei 0 beginnt. Eigentlich sollte doch der Ausgangswert egal sein... Wo im Handbuch steht die Lösung?
Gruß, der Ronny
dank' dir. Habe nun die Mischerquelle auf den Schalter SH gelegt. Verzögerung funktioniert nun, das Anfahren des Pitch-Sollwertes geht nun auch langsam. Allerdings springt der Kanal nach der Verzögerung schlagartig auf 0 und fährt dann langsam den Sollwert an. Prinzipiell ist es so vielleicht sogar besser, trotzdem möchte ich verstehen, warum die Funktion bei 0 beginnt. Eigentlich sollte doch der Ausgangswert egal sein... Wo im Handbuch steht die Lösung?
Gruß, der Ronny
Hy,
Nochmal:
die Mischer-QUELLE muss sich ändern.
Wenn du nur als Quelle den SH umschaltest, ist das immer noch die gleiche Mischerquelle.
Das kann man auf 2-3 Arten machen:
via 2 Logische Schalter als Mischerquelleumschaltung
oder
erst mal perHilfsmischer alles vorverarbeiten und dann erst auf eigentlichen Zielmischer
oder
via Flugphasenumschaltung
Aktuelles Handbuch Seite 339-341
Nochmal:
die Mischer-QUELLE muss sich ändern.
Wenn du nur als Quelle den SH umschaltest, ist das immer noch die gleiche Mischerquelle.
Das kann man auf 2-3 Arten machen:
via 2 Logische Schalter als Mischerquelleumschaltung
oder
erst mal perHilfsmischer alles vorverarbeiten und dann erst auf eigentlichen Zielmischer
oder
via Flugphasenumschaltung
Aktuelles Handbuch Seite 339-341
Zuletzt bearbeitet:
Hallo Helle,
Verzweiflung macht sich breit... Deine Vorschläge von hinten:
Flugphasenumschaltung- funktioniert eigentlich, aber ich kann nicht trennen zwischen Kanal 7 und Kanal 6, d.h. es werden beide Kanäle verzögert und verlangsamt geschalten. Kanal 7 soll aber schlagartig umschalten.
Hilfsmischer- den muss ich trotzdem wieder auf Kanal 6 bringen, wieder zwei Zeilen auf dem Kanal.
Bleiben die zwei logischen Schalter. Hier habe ich nun das Handbuch zerlesen (der Monitor ist schon abgenutzt vom vielen Draufgucken): das Beispiel mit den Querrudern auf Seite 339/340, genauso mache ich es doch mit meinem Schalter L2. Wenn ich einen weiteren logischen Schalter konfiguriere und mit dem dann auf Kanal 6 eine weitere Zeile schalte, ändert sich nichts an der Ausgabe. Kanal 6 geht schlagartig auf 0 und dann langsam auf den Sollwert.
Will ich etwas erreichen, was nicht funktionieren kann? Was verstehe ich falsch?
Gruß, der Ronny
Verzweiflung macht sich breit... Deine Vorschläge von hinten:
Flugphasenumschaltung- funktioniert eigentlich, aber ich kann nicht trennen zwischen Kanal 7 und Kanal 6, d.h. es werden beide Kanäle verzögert und verlangsamt geschalten. Kanal 7 soll aber schlagartig umschalten.
Hilfsmischer- den muss ich trotzdem wieder auf Kanal 6 bringen, wieder zwei Zeilen auf dem Kanal.
Bleiben die zwei logischen Schalter. Hier habe ich nun das Handbuch zerlesen (der Monitor ist schon abgenutzt vom vielen Draufgucken): das Beispiel mit den Querrudern auf Seite 339/340, genauso mache ich es doch mit meinem Schalter L2. Wenn ich einen weiteren logischen Schalter konfiguriere und mit dem dann auf Kanal 6 eine weitere Zeile schalte, ändert sich nichts an der Ausgabe. Kanal 6 geht schlagartig auf 0 und dann langsam auf den Sollwert.
Will ich etwas erreichen, was nicht funktionieren kann? Was verstehe ich falsch?
Gruß, der Ronny
Hallo,
ich habe leider mein Modell versehentlich gelöscht. Passiert halt ..
Nun habe ich alles wieder hingekommen, bis auf die Spannungsanzeige der einzelnen Zellen.
Ich weiß noch daß die 3 Zellen-Werte (bei 3S) rechts im Display standen und auch die Spannung angezeigt wurde.
Ich habe keinen Schimmer mehr, wie ich das fertig gebracht habe. (Comp. 2.0)
Wer kann mir da mal einen Tip geben.
Für schnelle Hilfe wäre ich sehr dankbar.
Gruß
berny
ich habe leider mein Modell versehentlich gelöscht. Passiert halt ..
Nun habe ich alles wieder hingekommen, bis auf die Spannungsanzeige der einzelnen Zellen.
Ich weiß noch daß die 3 Zellen-Werte (bei 3S) rechts im Display standen und auch die Spannung angezeigt wurde.
Ich habe keinen Schimmer mehr, wie ich das fertig gebracht habe. (Comp. 2.0)
Wer kann mir da mal einen Tip geben.
Für schnelle Hilfe wäre ich sehr dankbar.
Gruß
berny

Da hätte ich noch eine Frage.
Da ich seit Dezember die Taranis plus habe, aber noch mit Companion 2.0 arbeite und ich nun weitere
Telemtriewerte für meine Modelle einstelle, empfiehlt es sich auf Companion 2.1 umzusteigen ?
Ich habe hier gelesen, daß es komplizierter sein soll, aber mehr Möglichkeiten bietet ?
P.S.: Ich habe nicht vor den Sender zu wechseln, da mir der X9D ausreicht.
Da ich seit Dezember die Taranis plus habe, aber noch mit Companion 2.0 arbeite und ich nun weitere
Telemtriewerte für meine Modelle einstelle, empfiehlt es sich auf Companion 2.1 umzusteigen ?
Ich habe hier gelesen, daß es komplizierter sein soll, aber mehr Möglichkeiten bietet ?
P.S.: Ich habe nicht vor den Sender zu wechseln, da mir der X9D ausreicht.
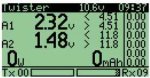
Wie kann man so ein Display erstellen ?
Geht das mit 2.0 ?
Anhang anzeigen 146382
Ist aus dem Handbuch.
Aber nirgends beschrieben, wie das gehen soll.
Geht das mit 2.0 ?
Anhang anzeigen 146382
Ist aus dem Handbuch.
Aber nirgends beschrieben, wie das gehen soll.
")
das geht auch mit der Taranis, dann halt im "Breitbildformat". Die generelle Darstellung ist aus der Version 2 - das ist schon richtig.
Wenn Du auf die einzelne Zellspannung anspielst, dafür benötigst Du den FLVSS Sensor, der überträgt dann diese an die Telemetrie.
Zuletzt bearbeitet:
Hallo Kalki,
gibt es für die X9d auch sowas ?
gibt es für die X9d auch sowas ?
ab Firmware 2.1.x kann man das über die erkannten Sensoren "ähnlich" darstellen, soweit ich das jetzt im Companion mal simuliert habe. Genauso lässt er sich wohl nicht mehr aufrufen.
Hi
kurze Frage:
Welche Firmware ist nun die letzte richtige für die X9E Sender und X6R Empfänger
1.) Für EU Sender/Empfänger
2.) Non EU Sender/Empfänger
Ich habe letzte Woche meinen Sender aus England bekommen und weiß nicht welche da drauf ist?
Auf der FrSky Seite bin ich mir nicht sicher welche die richtige ist und ich möchte keinen Fehler machen.
Kann mir da jemand helfen und links reinstellen?
Danke und Grüße
Gerhard
kurze Frage:
Welche Firmware ist nun die letzte richtige für die X9E Sender und X6R Empfänger
1.) Für EU Sender/Empfänger
2.) Non EU Sender/Empfänger
Ich habe letzte Woche meinen Sender aus England bekommen und weiß nicht welche da drauf ist?
Auf der FrSky Seite bin ich mir nicht sicher welche die richtige ist und ich möchte keinen Fehler machen.
Kann mir da jemand helfen und links reinstellen?
Danke und Grüße
Gerhard
Moin,
Non EU Sender http://www.frsky-rc.com/download/view.php?sort=Firmware&down=135&file=Firmware-XJT
Non EU X8R / X6R http://www.frsky-rc.com/download/view.php?sort=Firmware&down=192&file=X8R/X6R – Non-EU Version
EU Sender (LBT) http://www.frsky-rc.com/download/view.php?sort=Firmware&down=217&file=EU LBT Firmware
EU X8R / X6R http://www.frsky-rc.com/download/view.php?sort=Firmware&down=205&file=X8R/X6R – EU Version
Gruß
flo
Non EU Sender http://www.frsky-rc.com/download/view.php?sort=Firmware&down=135&file=Firmware-XJT
Non EU X8R / X6R http://www.frsky-rc.com/download/view.php?sort=Firmware&down=192&file=X8R/X6R – Non-EU Version
EU Sender (LBT) http://www.frsky-rc.com/download/view.php?sort=Firmware&down=217&file=EU LBT Firmware
EU X8R / X6R http://www.frsky-rc.com/download/view.php?sort=Firmware&down=205&file=X8R/X6R – EU Version
Gruß
flo
- Status
- Nicht offen für weitere Antworten.

