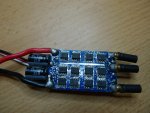
Platinenfoto ist leider nicht so einfach, da als "4 Lagen für Arme" gefertigt, sprich zwei gestapelte Platinen, fest verlötet.
mußt aber nicht unbedingt aufschneiden. welche simonk passt da drauf - ich tippe auf rb50a oder rb70a


adv power_r offset
18 1600 0 schlechter
25 1600 0 kein Vollgas mehr möglich
12 400 0 besser als normal, kaum Stalls, rauer Übergang
18 400 25 Probleme kurz vor VG
12 400 25 schlechter
Pass 1...
m8def.inc(44) : PRAGMA directives currently ignored
m8def.inc(48) : PRAGMA directives currently ignored
m8def.inc(53) : PRAGMA directives currently ignored
m8def.inc(690) : PRAGMA directives currently ignored
m8def.inc(691) : PRAGMA directives currently ignored
m8def.inc(692) : PRAGMA directives currently ignored
m8def.inc(693) : PRAGMA directives currently ignored
m8def.inc(734) : PRAGMA directives currently ignored
Pass 2...
m8def.inc(44) : PRAGMA directives currently ignored
m8def.inc(48) : PRAGMA directives currently ignored
m8def.inc(53) : PRAGMA directives currently ignored
m8def.inc(690) : PRAGMA directives currently ignored
m8def.inc(691) : PRAGMA directives currently ignored
m8def.inc(692) : PRAGMA directives currently ignored
m8def.inc(693) : PRAGMA directives currently ignored
m8def.inc(734) : PRAGMA directives currently ignored
done
Used memory blocks:
Data : Start = 0x0060, End = 0x0089, Length = 0x002A
Code : Start = 0x0000, End = 0x0448, Length = 0x0449
Code : Start = 0x0E00, End = 0x0FDF, Length = 0x01E0
Code : Start = 0x0FE0, End = 0x0FFF, Length = 0x0020
Assembly complete with no errors.
Segment usage:
Code : 1609 words (3218 bytes)
Data : 42 bytes
EEPROM : 0 bytes
Drücken Sie eine beliebige Taste . . .
adv power_r offset
18 1600 0 schlechter
25 1600 0 kein Vollgas mehr möglich
12 400 0 besser als normal, kaum Stalls, rauer Übergang
18 400 25 Probleme kurz vor VG
12 400 25 schlechter