
STorM32 BGC: 3-Achsen STM32 Brushless Gimbal Controller
- Themenstarter OlliW
- Beginndatum
@Damaged da ist kein blauzahn modul mit dabei?! du hast das Controller board gekauft.
http://hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=84191
steht aber auch in der Beschreibung, ich hatte mich verlesen
So ein Mist!
Kann ich ein HC06 Modul nachträglich auflöten?
Gruß
Zuletzt bearbeitet:
@Rolf_:
man sieht den Aufbau leider kaum, aber ich haue das jetzt einfach mal raus: ist mit 99.9999%-iger Wahrscheinlichkeit ein User-Fehler ... falsche Motorpolzahl, 2te IMU am falschen Platz, falsche Orientierung, usw. und so fort ... was kann ich so natürlich nicht sagen ... auf jedenfall Gimbal Config Tool von vorne bis hinten durchlaufen, nur dann passt alles zusammen, und das Wiki zur 2ten Imu durchlesen (und befolgen)
man sieht den Aufbau leider kaum, aber ich haue das jetzt einfach mal raus: ist mit 99.9999%-iger Wahrscheinlichkeit ein User-Fehler ... falsche Motorpolzahl, 2te IMU am falschen Platz, falsche Orientierung, usw. und so fort ... was kann ich so natürlich nicht sagen ... auf jedenfall Gimbal Config Tool von vorne bis hinten durchlaufen, nur dann passt alles zusammen, und das Wiki zur 2ten Imu durchlesen (und befolgen)
bei mir tritt das Problem nur auf wenn die Roll Achse sich neigt
hier ist die 2te IMU aus
[video=youtube;9c0Lj7IpmdE]https://www.youtube.com/watch?v=9c0Lj7IpmdE[/video]
hier ist die 2te IMU an
ich hoffe Du kannst was erkennen
[video=youtube;IQiFn2SJ9LA]https://www.youtube.com/watch?v=IQiFn2SJ9LA[/video]
@Michael:
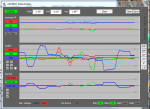
da brauche ich mir gar nicht die vids ansehen sondern das Bild des2ten reicht um zu sehen dass da irgendetwas fundamental falsch eingestellt ist ... mit 2ter IMU MÜSSEN die drei Kurven in jedem Fall, bei allen Bewegungen, nahe der Nulllinie bleiben, was sie ja offensichtlich nicht tun => die einzige Möglichkeit die ich kenne damit es dazu kommt ist falsche Konfig. (das sieht man bei Rolf_ ja auch).
da brauche ich mir gar nicht die vids ansehen sondern das Bild des2ten reicht um zu sehen dass da irgendetwas fundamental falsch eingestellt ist ... mit 2ter IMU MÜSSEN die drei Kurven in jedem Fall, bei allen Bewegungen, nahe der Nulllinie bleiben, was sie ja offensichtlich nicht tun => die einzige Möglichkeit die ich kenne damit es dazu kommt ist falsche Konfig. (das sieht man bei Rolf_ ja auch).
Hallo Olli,
ich würde mich gerne für deine Arbeit zu meinen Gunsten erkenntlich zeigen, leider kann ich keinen Trinkgeld-Button finden. Kannst du mir hierzu weiterhelfen?
Ehrlich gesagt wusste ich nicht was ich kaufe und woher es stammt, nach kurzem einlesen schaut dein Projekt echt klasse aus!
Vielen Dank!
So jetzt bestelle ich das Blauzahn-Modul
Grüße
ich würde mich gerne für deine Arbeit zu meinen Gunsten erkenntlich zeigen, leider kann ich keinen Trinkgeld-Button finden. Kannst du mir hierzu weiterhelfen?
Ehrlich gesagt wusste ich nicht was ich kaufe und woher es stammt, nach kurzem einlesen schaut dein Projekt echt klasse aus!
Vielen Dank!
So jetzt bestelle ich das Blauzahn-Modul
Grüße
So meinte ich das auch nicht. Alleine deine Hilfe hier im Forum ist für mich Support genug. Da können sich manch große Hersteller eine Scheibe von abschneiden.
Gruß
Sven
EDIT: Außerdem steht ja alles super beschrieben im Wiki. Wenn er denn mal aufzurufen ist. Warum ist er eigentlich des öfteren nicht erreichbar?
Gruß
Sven
EDIT: Außerdem steht ja alles super beschrieben im Wiki. Wenn er denn mal aufzurufen ist. Warum ist er eigentlich des öfteren nicht erreichbar?
Zuletzt bearbeitet:
Hallo Olli,
vielen dank für die prompte Hilfe. Ich habe die eingestellte IMU Orientierung noch mal manuell, wie auf Deiner Seite
http://www.olliw.eu/storm32bgc-wiki/Manually_Setting_the_IMU_Orientation beschrieben, überprüft.
Sowohl die Raumlage der CAM-IMU wie auch die der MPU auf dem Board zeigen beim einzelnen Überprüfen der Drehrichtungen korrekte Einstellung der Orientierung an.
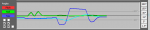
Aber: Es fiel auf, dass (Motoren abgeschaltet) Kamera und zweite IMU synchron bewegt identische Werte für Roll und Pitch von beiden IMUs geliefert werden. Für die YAW-Achse hängt die 2te IMU (Onboard) träge hinterher.
Könnte das ein Hardewaredefekt der Onboard - MPU sein ?
Hätte erwartet, dass das Verhalten auf der YAW-Achse identisch zu den beiden anderen ist.
Habe zur Verdeutlichung einen Screenshot angehängt. Zunächst die grüne Rollachse läuft zusammen (die Rollachse auch, nur nicht aufgezeichnet), die YAW Achse hängt träge nach, obwohl Cam und Kopterframe sich gleich drehen.
vielen dank für die prompte Hilfe. Ich habe die eingestellte IMU Orientierung noch mal manuell, wie auf Deiner Seite
http://www.olliw.eu/storm32bgc-wiki/Manually_Setting_the_IMU_Orientation beschrieben, überprüft.
Sowohl die Raumlage der CAM-IMU wie auch die der MPU auf dem Board zeigen beim einzelnen Überprüfen der Drehrichtungen korrekte Einstellung der Orientierung an.
Aber: Es fiel auf, dass (Motoren abgeschaltet) Kamera und zweite IMU synchron bewegt identische Werte für Roll und Pitch von beiden IMUs geliefert werden. Für die YAW-Achse hängt die 2te IMU (Onboard) träge hinterher.
Könnte das ein Hardewaredefekt der Onboard - MPU sein ?
Hätte erwartet, dass das Verhalten auf der YAW-Achse identisch zu den beiden anderen ist.
Habe zur Verdeutlichung einen Screenshot angehängt. Zunächst die grüne Rollachse läuft zusammen (die Rollachse auch, nur nicht aufgezeichnet), die YAW Achse hängt träge nach, obwohl Cam und Kopterframe sich gleich drehen.
Anhänge
-
 6,4 KB Aufrufe: 16
6,4 KB Aufrufe: 16
@Rolf_:
auf den ersten Blick sieht das schon komisch aus, aber ich bin mir da nicht ganz sicher ob's das wirklich ist ...
am Yaw fummle ich rum, d.h. hängt evtl stark davon ab wie genau das aufgenommen wurde, und das habe ich jetzt nicht versucht auszufieseln
kannst du das vielleicht so wiederholen: NUR usb angeschlossen, aber keine Batterie, und dann den Test genauso nochmals machen
PS: die 2 häfigsten Fehler warum was mit der 2ten IMU nicht klappt ist (i) Motorpole falsch eingestellt und (ii) 2te IMU am Yaw Arme befestigt, vielleicht magst du das explizit ausschliessen
auf den ersten Blick sieht das schon komisch aus, aber ich bin mir da nicht ganz sicher ob's das wirklich ist ...
am Yaw fummle ich rum, d.h. hängt evtl stark davon ab wie genau das aufgenommen wurde, und das habe ich jetzt nicht versucht auszufieseln
kannst du das vielleicht so wiederholen: NUR usb angeschlossen, aber keine Batterie, und dann den Test genauso nochmals machen
PS: die 2 häfigsten Fehler warum was mit der 2ten IMU nicht klappt ist (i) Motorpole falsch eingestellt und (ii) 2te IMU am Yaw Arme befestigt, vielleicht magst du das explizit ausschliessen
Zuletzt bearbeitet:
@OlliW:
Als 2te IMU dient die Onboard MPU auf dem Board, das OBERHALB der YAW Achse montiert ist. Bewegt sich also so, wie sich der Kopterrahmen bewegt.
14 polige Motoren habe ich aus den von Dir verlinkten Beispielsetups für das 3d DYS-Smart Gimbal übernommen:
http://www.olliw.eu/storm32bgc-wiki/Example_Setups
http://www.rcgroups.com/forums/showpost.php?p=30092104&postcount=2516
http://www.rcgroups.com/forums/showpost.php?p=30212877&postcount=2673
Beide geben 14 Pole für die drei Motoren an.
Habe die PIDs des letzten Links vom User wdaehn auf rcgroups übernommen. Möchte auch sagen, dass das Gimbal mit Deiner Software und den beiden Setups mit nur einer IMU in den prinzipiellen Grenzen (für einen Sensor) super funktioniert.
Habe gerade mit lediglich USB-Anschluss die Daten bei passiver , aber gleichzeitiger Cam/Rahmen Roll/Nick/Yaw - Bewegung aufgezeichnet.
Identischer Effekt: Roll und Yaw laufen synchron, bei Yaw läuft die Onboard-IMU des Mainboards träge hinterher.
 Anhang anzeigen nur_USB.txt
Anhang anzeigen nur_USB.txt
Gruß Rolf
Als 2te IMU dient die Onboard MPU auf dem Board, das OBERHALB der YAW Achse montiert ist. Bewegt sich also so, wie sich der Kopterrahmen bewegt.
14 polige Motoren habe ich aus den von Dir verlinkten Beispielsetups für das 3d DYS-Smart Gimbal übernommen:
http://www.olliw.eu/storm32bgc-wiki/Example_Setups
http://www.rcgroups.com/forums/showpost.php?p=30092104&postcount=2516
http://www.rcgroups.com/forums/showpost.php?p=30212877&postcount=2673
Beide geben 14 Pole für die drei Motoren an.
Habe die PIDs des letzten Links vom User wdaehn auf rcgroups übernommen. Möchte auch sagen, dass das Gimbal mit Deiner Software und den beiden Setups mit nur einer IMU in den prinzipiellen Grenzen (für einen Sensor) super funktioniert.
Habe gerade mit lediglich USB-Anschluss die Daten bei passiver , aber gleichzeitiger Cam/Rahmen Roll/Nick/Yaw - Bewegung aufgezeichnet.
Identischer Effekt: Roll und Yaw laufen synchron, bei Yaw läuft die Onboard-IMU des Mainboards träge hinterher.
Anhang anzeigen nur_USB.txt
Gruß Rolf
OK, dann nehme ich alle meine "ist Konfigfehler" Behauptungen zurück und behaupte das Gegenteil
das sieht tatsächlich nach einem ernsthaften on-board IMU Problem aus, bei mir verhält es sich so wie unter diesen Bedingungen gedacht und erwartet ... so was habe ich noch nicht gesehen, dass nur eine Gyro-Achse Mist macht, aber man lernt ja nicht aus
tja, was man nun tun - entweder eine extra 2te IMU am I2C#2 anschliessen, oder auf die 2te IMU verzichten, oder ein neues Board ...
wenn du ne extra IMU hättest könntest du die auf alle Fälle mal anschliessen, nur um zu Testen dass das Verhalten dann weg ist
PS: Michael, bei dir bleibe ich (noch) bei der "ist Konfigfehler" Behauptungen
das sieht tatsächlich nach einem ernsthaften on-board IMU Problem aus, bei mir verhält es sich so wie unter diesen Bedingungen gedacht und erwartet ... so was habe ich noch nicht gesehen, dass nur eine Gyro-Achse Mist macht, aber man lernt ja nicht aus
tja, was man nun tun - entweder eine extra 2te IMU am I2C#2 anschliessen, oder auf die 2te IMU verzichten, oder ein neues Board ...
wenn du ne extra IMU hättest könntest du die auf alle Fälle mal anschliessen, nur um zu Testen dass das Verhalten dann weg ist
PS: Michael, bei dir bleibe ich (noch) bei der "ist Konfigfehler" Behauptungen
Keinen Mux an Motoren bei storm32 bgc
Guten Tag,
Ich bin nun seit ca. 2 Wochen stolzer Besitzer des Storm32 bgc 3-Achsen Controllers.
Nach dem auspacken habe ich das Mainboard gleich angebaut. Die IMU allerings noch nicht, da ich die 6-Punkt-Kali gleich machen wollte Das hat auch super funktioniert.
Jetzt habe ich die IMU erstmal "provisorisch" links neben der Kamera (von Vorn gesehen) befestigt, um zu testen ob etwas funktioniert.
Da ich nirgends etwas finden konnte, wo man ablesen konnte, welcher Motore woran kommt, habe ich es folgendermaßen angeschlossen:
- YAW-Motor an den Anschluss "Moto"
- Roll-Motor an den Anschluss "Mot1"
- Pitch-Motor an den Anschluss "Mot2"
So nun habe ich mal Strom draufgegeben (von einem 3S-LiPo) und nichts passiert. Ich kann so lange warten wie ich will aber Motoren zeigen keinen Mux ;(
Ich hab zwar spüren können, dass sich die Motoren unter Strom minimal "träger" (schwerer) bewegen lassen als ohne Strom, aber lange nicht so wie es sein muss.
Die LEDs verhalten sich folgender Maßen:
Nach Anschluss an Akku, leuchtet Grüne LED dauerhaft und Rote LED blinkt in regelmäßigen Abständen.
Nach ca. 5-7 sekunden ändert die Grüne LED in schnelles blinken, die Rote LED verhält sich gleich wie vorher.
5 sekunden später, kehrt der Zustand beider LEDs wie bei nach dem anschalten zurück (Grün dauerhaft und Rot blinkt regelmäßig)
Ich habe in der Software nichts anderes außer der 6-Punkt-Kali gemacht.
Kann mir jemand helfen ? Ich freue mich über Antworten.
LG Manu
Guten Tag,
Ich bin nun seit ca. 2 Wochen stolzer Besitzer des Storm32 bgc 3-Achsen Controllers.
Nach dem auspacken habe ich das Mainboard gleich angebaut. Die IMU allerings noch nicht, da ich die 6-Punkt-Kali gleich machen wollte
Das hat auch super funktioniert.Jetzt habe ich die IMU erstmal "provisorisch" links neben der Kamera (von Vorn gesehen) befestigt, um zu testen ob etwas funktioniert.
Da ich nirgends etwas finden konnte, wo man ablesen konnte, welcher Motore woran kommt, habe ich es folgendermaßen angeschlossen:
- YAW-Motor an den Anschluss "Moto"
- Roll-Motor an den Anschluss "Mot1"
- Pitch-Motor an den Anschluss "Mot2"
So nun habe ich mal Strom draufgegeben (von einem 3S-LiPo) und nichts passiert. Ich kann so lange warten wie ich will aber Motoren zeigen keinen Mux ;(
Ich hab zwar spüren können, dass sich die Motoren unter Strom minimal "träger" (schwerer) bewegen lassen als ohne Strom, aber lange nicht so wie es sein muss.
Die LEDs verhalten sich folgender Maßen:
Nach Anschluss an Akku, leuchtet Grüne LED dauerhaft und Rote LED blinkt in regelmäßigen Abständen.
Nach ca. 5-7 sekunden ändert die Grüne LED in schnelles blinken, die Rote LED verhält sich gleich wie vorher.
5 sekunden später, kehrt der Zustand beider LEDs wie bei nach dem anschalten zurück (Grün dauerhaft und Rot blinkt regelmäßig)
Ich habe in der Software nichts anderes außer der 6-Punkt-Kali gemacht.
Kann mir jemand helfen ? Ich freue mich über Antworten.
LG Manu
Anhänge
-
 701,3 KB Aufrufe: 14
701,3 KB Aufrufe: 14 -
 588,3 KB Aufrufe: 14
588,3 KB Aufrufe: 14
Du musst zwingend das Gimbal Config Tool abarbeiten.
Davon abgesehen, default ist Pitch auf Mot1, Roll Mot2. (Im Menu oben gäbe es bei "Expert" die Möglichkeit das zu ändern.)
http://www.olliw.eu/storm32bgc-wiki/Getting_Started#Hardware_Setup
Davon abgesehen, default ist Pitch auf Mot1, Roll Mot2. (Im Menu oben gäbe es bei "Expert" die Möglichkeit das zu ändern.)
http://www.olliw.eu/storm32bgc-wiki/Getting_Started#Hardware_Setup
Hi, danke für deine Antwort.
Ich versuche jetzt seit 2 Stunden in dem Tool das mit dem Pitch auf 45° nach unten halten. Und ich schaff es nicht.
Ich checke immer wieder das Data Display und ich bin auch immer ca. bei 45° aber nach 2 min. sagt es mir immer, dass es abgebrochen wurde, weil es nichts gefunden hat.
Das macht mich grad wahnsinnig
Ich hab keine Ahnung warum.
Kann das vllt daran liegen, dass ich die 6-Punnkt Kali schon gemacht habe ???
LG Manu
Ich versuche jetzt seit 2 Stunden in dem Tool das mit dem Pitch auf 45° nach unten halten. Und ich schaff es nicht.
Ich checke immer wieder das Data Display und ich bin auch immer ca. bei 45° aber nach 2 min. sagt es mir immer, dass es abgebrochen wurde, weil es nichts gefunden hat.
Das macht mich grad wahnsinnig
Ich hab keine Ahnung warum.
Kann das vllt daran liegen, dass ich die 6-Punnkt Kali schon gemacht habe ???
LG Manu
das klingt danach dass du das einfach falsch benutzt ... das DataDisplay hat da genau nichts zu suchen!!!
was ca. 45° sind das siehst du auch mit dem Auge
die Kali macht nichts
vielleicht nicht zu viel denken, sondern einfach der Anleitung/Anweisung stupide folgen, evtl das Video Tutorial ansehen
ansonsten: Video von dem was du machst
was ca. 45° sind das siehst du auch mit dem Auge
die Kali macht nichts
vielleicht nicht zu viel denken, sondern einfach der Anleitung/Anweisung stupide folgen, evtl das Video Tutorial ansehen
ansonsten: Video von dem was du machst

