
Ardu Pilot Mega 2.0
- Themenstarter FPVer
- Beginndatum
So, habe nun wahrscheinlich den Grund gefunden, warum mein Quad gestern mehr schlecht als recht geflogen ist: Rate Roll P und Rate Pitch P waren auf 0. Dasselbe hatte ich schon einmal mit Yaw. Sagt mal kapiere ich da was mit dem Ch 6 nicht?
Ich hatte den gestern auf einen Poti gelegt, damit ich Rate P während des Fluges ändern kann.
Dazu habe ich minimale und maximale Werte für CH 6 festgelegt - der Minimalwert war über 0. Wie kann es dann sein, dass die Werte 0 sind??
Ich lasse das jetzt erst mal mit dem Poti und nehm lieber meinen Laptop mit, dauert zwar länger, aber sicher ist sicher...
Ich hatte den gestern auf einen Poti gelegt, damit ich Rate P während des Fluges ändern kann.
Dazu habe ich minimale und maximale Werte für CH 6 festgelegt - der Minimalwert war über 0. Wie kann es dann sein, dass die Werte 0 sind??
Ich lasse das jetzt erst mal mit dem Poti und nehm lieber meinen Laptop mit, dauert zwar länger, aber sicher ist sicher...
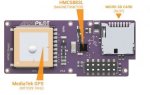
Shield = GPS Board mit Kompass
Genau das ist die Frage, die im Moment keiner beantworten kann.
Ich vermute, dass die Pins, zumindest 2 (VCC und GND) mit angelötet werden müssen, damit das Shield seine Versorgungsspannung erhält.
Näheres weiß ich heute Abend, wenn ich das probiert habe.
Genau das ist die Frage, die im Moment keiner beantworten kann.
Ich vermute, dass die Pins, zumindest 2 (VCC und GND) mit angelötet werden müssen, damit das Shield seine Versorgungsspannung erhält.
Näheres weiß ich heute Abend, wenn ich das probiert habe.
was meinst du mit schield?
also müssen die pins mit angelötet werden?
also müssen die pins mit angelötet werden?
aso hehe sagts doch gleich ") ich hatte auch den Bausatz vom APM2 un klar müssen die pins glaube insgesamt 5 oder 6 angelötet werden
ich hatte auch den Bausatz vom APM2 un klar müssen die pins glaube insgesamt 5 oder 6 angelötet werden
sonst ist tote hose im shield :-D. war bei mir ganz genauso und wenn ihr bilder von diy anschaut mit dem fertigen APM2 seht ihr uch dass die alle pins angelötet haben... ein Blick in den schaltplan würde die Frage auch beantworten
ich hatte auch den Bausatz vom APM2 un klar müssen die pins glaube insgesamt 5 oder 6 angelötet werdensonst ist tote hose im shield :-D. war bei mir ganz genauso und wenn ihr bilder von diy anschaut mit dem fertigen APM2 seht ihr uch dass die alle pins angelötet haben... ein Blick in den schaltplan würde die Frage auch beantworten
Hallo Zusammen .
Nach X Jahren Modellbaupause , bin ich total begeistert, was sich so verändert hat.
Ich habe versucht mich auf den aktuellen Stand zu bringen. Ergebnis: der APM 0.2 müsste das richtige für mich sein.
Leider fehlen mir noch die Zugsamenhänge . Um alles ganz zu verstehen.
Z.B.der AMP Mission Planer
Was wird denn noch alles benötigt um Ihn im Vollen Umfang mit dem APM 2.0 zu nutzen?
Werden alle Daten zu Bodenstation übertragen( Gps,Höhe ...) und wie bekommt man das Bild in den AMP Mission Planer.
Es soll ja auch einen Bodensensor (Sonar oder optisch )geben . Das, was ich gefunden habe, war aber nicht mit dem 2.0 kompatibel.
Hat schon von euch Jemand alles zusammen am laufen ?
Sorry, dass ich so viele Fragen auf einmal stelle.
Die Verfügbarkeit des APM 2.0 ist im Moment ja auch noch nicht so umwerfend.
Wenn man schon fast 2 Monate auf ihn warten muss möchte ich nichts vergessen.
ach noch was :
Als Projekt wollte ich einen Y6 aufbauen.( der Skorpion 650 ist schon unterwegs)
ciao Markus
Nach X Jahren Modellbaupause , bin ich total begeistert, was sich so verändert hat.
Ich habe versucht mich auf den aktuellen Stand zu bringen. Ergebnis: der APM 0.2 müsste das richtige für mich sein.
Leider fehlen mir noch die Zugsamenhänge . Um alles ganz zu verstehen.
Z.B.der AMP Mission Planer
Was wird denn noch alles benötigt um Ihn im Vollen Umfang mit dem APM 2.0 zu nutzen?
Werden alle Daten zu Bodenstation übertragen( Gps,Höhe ...) und wie bekommt man das Bild in den AMP Mission Planer.
Es soll ja auch einen Bodensensor (Sonar oder optisch )geben . Das, was ich gefunden habe, war aber nicht mit dem 2.0 kompatibel.
Hat schon von euch Jemand alles zusammen am laufen ?
Sorry, dass ich so viele Fragen auf einmal stelle.
Die Verfügbarkeit des APM 2.0 ist im Moment ja auch noch nicht so umwerfend.
Wenn man schon fast 2 Monate auf ihn warten muss möchte ich nichts vergessen.
ach noch was :
Als Projekt wollte ich einen Y6 aufbauen.( der Skorpion 650 ist schon unterwegs)
ciao Markus
aso hehe sagts doch gleich ich hatte auch den Bausatz vom APM2 un klar müssen die pins glaube insgesamt 5 oder 6 angelötet werden
sonst ist tote hose im shield :-D. war bei mir ganz genauso und wenn ihr bilder von diy anschaut mit dem fertigen APM2 seht ihr uch dass die alle pins angelötet haben... ein Blick in den schaltplan würde die Frage auch beantworten
ich hatte auch den Bausatz vom APM2 un klar müssen die pins glaube insgesamt 5 oder 6 angelötet werdensonst ist tote hose im shield :-D. war bei mir ganz genauso und wenn ihr bilder von diy anschaut mit dem fertigen APM2 seht ihr uch dass die alle pins angelötet haben... ein Blick in den schaltplan würde die Frage auch beantworten
Hier die Antwort auf die Frage, ob die 6 Pins am GPS gelötet werden müssen
http://www.google.de/imgres?q=apm2&hl=de&gbv=2&biw=1024&bih=625&tbm=isch&tbnid=kxKlQZgD04Z81M:&imgrefurl=http://diydrones.com/xn/detail/705844:Comment:840591%3Fxg_source%3Dactivity&docid=zeIWU82Fnz2ICM&imgurl=http://api.ning.com/files/ZWv*3YtWpdDChnnlVfdMHJPSvnfnM3Uiwj9ZM3Q6eNedvRcy5bhfsT4BV0RpAay5dmxZiHKv5GB2K*3OYRJzyw__/apm2pinsbaseboard.jpg&w=855&h=812&ei=1GahT_iBKIHSsgaKsrmhCA&zoom=1&iact=hc&vpx=356&vpy=143&dur=105&hovh=219&hovw=230&tx=121&ty=140&sig=106771202490338158674&page=4&tbnh=154&tbnw=172&start=54&ndsp=20&ved=1t:429,r:1,s:54,i:194
http://www.google.de/imgres?q=apm2&hl=de&gbv=2&biw=1024&bih=625&tbm=isch&tbnid=kxKlQZgD04Z81M:&imgrefurl=http://diydrones.com/xn/detail/705844:Comment:840591%3Fxg_source%3Dactivity&docid=zeIWU82Fnz2ICM&imgurl=http://api.ning.com/files/ZWv*3YtWpdDChnnlVfdMHJPSvnfnM3Uiwj9ZM3Q6eNedvRcy5bhfsT4BV0RpAay5dmxZiHKv5GB2K*3OYRJzyw__/apm2pinsbaseboard.jpg&w=855&h=812&ei=1GahT_iBKIHSsgaKsrmhCA&zoom=1&iact=hc&vpx=356&vpy=143&dur=105&hovh=219&hovw=230&tx=121&ty=140&sig=106771202490338158674&page=4&tbnh=154&tbnw=172&start=54&ndsp=20&ved=1t:429,r:1,s:54,i:194
Hallo Michael ,diese Antwort habe ich fast schon erwartet ;-)
Bei anderen Foren kenne ich das nun da bin ich meist der,der mehr Ahnung hat , wie die Anderen.
Ich habe nun Tage damit verbracht mit meine schlechten Englisch Kenntnissen überhaupt Infos zu finden , die ich verstehe und mich in die richtige Richtung führen .
Zu Meiner Freude habe ich Dieses sehr gut durchkonstruierte Forum gefunden.
Das einzige Wiki zu dem Thema .welche ich gefunden habe, ist in Englisch. Da Du ja Profi bist kannst Du mir bestimmt sagen wo ich ein Deutsches Wiki finde.
Auf Deiner Seite war ich natürlich auch
Bei anderen Foren kenne ich das nun da bin ich meist der,der mehr Ahnung hat , wie die Anderen.
Ich habe nun Tage damit verbracht mit meine schlechten Englisch Kenntnissen überhaupt Infos zu finden , die ich verstehe und mich in die richtige Richtung führen .
Zu Meiner Freude habe ich Dieses sehr gut durchkonstruierte Forum gefunden.
Das einzige Wiki zu dem Thema .welche ich gefunden habe, ist in Englisch. Da Du ja Profi bist kannst Du mir bestimmt sagen wo ich ein Deutsches Wiki finde.
Auf Deiner Seite war ich natürlich auch
Und ich empfehl noch als Anfänger nicht auf Y6 zu gehen. Das Ding ist imho einiges bescheidener in der Einstellung als nen Hexa und sollte auch mehr wackeln wenn beide gut eingestellt sind.
Eagle N6 V2 fliegen daher gehört das hier nicht hin.
Anfänger ...ja aber ich dachte mit ein Multikopter ist leichter zu fliegen wie ein Hubi
Ich hab gerade ein ganz anderes Problem. Ich glaub das mein Sonar nicht geht.. oder bin ich zu blöd zum einstellen. Ich hab am APM 2.0 das Max Sonar 1200Xl dran. Aber sobald ich in der gewünschten Ausgangshöhe bin und Sonar Alt Hode einschalte tut sich nicht wirklich was. Der Copter steigt weiter wenn auch langsamer. Ich kenn bisher nur das Rabbit Board mit dem 5$ Sonar das hält echt perfekt die Höhe. Ich hab das Sonar in der GUI aktiviert und EZ0 ausgewählt sollte ja soweit stimmen. Sonst muß man ja nix machen denk ich mal.
Hat evtl. jemand das gleiche Sonar? Auch am APM oder so in Betrieb? Ich werde es noch am APM 1 mal testen um sicher zu gehen. Angschlossen hab ich lediglich 3 Kabel wie im Wiki.
Hoffe es hat jemand nen Tip für mich...
Hat evtl. jemand das gleiche Sonar? Auch am APM oder so in Betrieb? Ich werde es noch am APM 1 mal testen um sicher zu gehen. Angschlossen hab ich lediglich 3 Kabel wie im Wiki.
Hoffe es hat jemand nen Tip für mich...

