
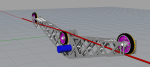
Also ich stelle mir den auf- und abbau sehr mühsam vor, wenn der Schlitten von Anfang an am Seil hängt. Ich würde lieber das Seil in Ruhe spannen, alles überprüfen und dann den Wagen einhängen.
Alles 100% symmetrisch zu haben ist sowieso nicht möglich, spätestens beim Antriebsmotor und beim Gimbal/Kamera. Daher muss man den Schwerpunkt anpassen können, also warum nicht gleich den Vorteil des "einhängens" mitnehmen? Stabilität der Achsbefestigung könnte man eventuell als einziges Argument gelten lassen.
Oder?
Alles 100% symmetrisch zu haben ist sowieso nicht möglich, spätestens beim Antriebsmotor und beim Gimbal/Kamera. Daher muss man den Schwerpunkt anpassen können, also warum nicht gleich den Vorteil des "einhängens" mitnehmen? Stabilität der Achsbefestigung könnte man eventuell als einziges Argument gelten lassen.
Oder?

")

