
Frage zu CC3D PID Feintuning
- Themenstarter amayer
- Beginndatum
Ich komme von den einfach zu fliegenden Naze Kopter und möchte jetzt mal "richtig" fliuegen lernen.
Dazu habe ich einen 450-Frame genommen und ein CC3D Board montiert.
Jetzt ist alles soweit über OpenPilot installiert.
Da ich es erstmal etwas ruhiger starten will, stellt sich die Frage, wie ich die PID Werte dafür einstellen soll.
Also ein stabilisierter "Opa-Flug"..
Später soll es dann schrittweise direkter werden..
Dazu habe ich einen 450-Frame genommen und ein CC3D Board montiert.
Jetzt ist alles soweit über OpenPilot installiert.
Da ich es erstmal etwas ruhiger starten will, stellt sich die Frage, wie ich die PID Werte dafür einstellen soll.
Also ein stabilisierter "Opa-Flug"..
Später soll es dann schrittweise direkter werden..
für mich ist das auch alles neu, jedoch ist gerade das CC3D recht einfach einzustellen.
Wenn Du den Wizard durch gehst, kommst Du doch an eine Stelle, wo Du vor konfigurierte Copter auswählen kannst.
Ich habe für den 450er Frame den eingestellten 450 ausgewählt.
Im Attitude flog er damit auf anhieb perfekt, außer dass mir die Expowerte zu hoch, also der Copter zu indirekt und träge war.
Rest ist dann zu erfliegen und nach und nach auf seine persönlichen Vorlieben einzustellen.
Bin da selber auch dabei und immer findet man noch hier und da eine Verbesserung.
Probier´s einfach mal aus!
Naja... du weißt ja schon mal, was "Expowerte" sind... immerhin.
Da muß ich noch einiges lesen.
Wozu man beim Wizzard an der Funke plötzlich diverse Schalter belegen muß, verstehe ich auch nicht.
Eigentlich reichen doch 4 für die Steuerung und ein weiterer für die Flugmodi !
Nun habe ich plötzlich 8 Kanäle belegt und weiß eigentlich garnicht wofür ??
Sonst habe ich es genau so gemacht wie du... auf F450 gedrückt und installiert.
Wenn man da in die Untermenüs klickt und die ganzen Einstellungen sich ansieht die man noch machen könnte, frage ich mich, wie ich das jemals rausfinden soll...

Du machst mir aber Hoffnung...

Da muß ich noch einiges lesen.
Wozu man beim Wizzard an der Funke plötzlich diverse Schalter belegen muß, verstehe ich auch nicht.
Eigentlich reichen doch 4 für die Steuerung und ein weiterer für die Flugmodi !
Nun habe ich plötzlich 8 Kanäle belegt und weiß eigentlich garnicht wofür ??
Sonst habe ich es genau so gemacht wie du... auf F450 gedrückt und installiert.
Wenn man da in die Untermenüs klickt und die ganzen Einstellungen sich ansieht die man noch machen könnte, frage ich mich, wie ich das jemals rausfinden soll...
Du machst mir aber Hoffnung...
Das OP Wiki ist sehr gut gepflegt und wer des englischen mächtig ist kommt dort gut zurecht ")
Im Grunde reichen dir 4 Kanäle +1 Schalter für den Flugmodus. Der Rest ist nicht notwendig aber gut, um z.B. die PIDs mit einem Poti einzustellen oder dir den aktuellen Flugmodus per LED anzeigen zu lassen. Du kannst damit aber auch zwischen verschiedenen PID Bänken umschalten (z.B. wenn du einen kleinen Copter mit 3S und 4S Akkus fliegst und dafür unterschiedliche PIDs hast). Das Ganze macht für einen Einsteiger in die FC nicht soo viel Sinn, wenn du dich aber tiefer einarbeiten möchtest siehst du dass es sehr sinnvoll ist
Im Grunde reichen dir 4 Kanäle +1 Schalter für den Flugmodus. Der Rest ist nicht notwendig aber gut, um z.B. die PIDs mit einem Poti einzustellen oder dir den aktuellen Flugmodus per LED anzeigen zu lassen. Du kannst damit aber auch zwischen verschiedenen PID Bänken umschalten (z.B. wenn du einen kleinen Copter mit 3S und 4S Akkus fliegst und dafür unterschiedliche PIDs hast). Das Ganze macht für einen Einsteiger in die FC nicht soo viel Sinn, wenn du dich aber tiefer einarbeiten möchtest siehst du dass es sehr sinnvoll ist
Naja... du weißt ja schon mal, was "Expowerte" sind... immerhin.
Da muß ich noch einiges lesen.
Wozu man beim Wizzard an der Funke plötzlich diverse Schalter belegen muß, verstehe ich auch nicht.
Eigentlich reichen doch 4 für die Steuerung und ein weiterer für die Flugmodi !
Nun habe ich plötzlich 8 Kanäle belegt und weiß eigentlich garnicht wofür ??
Sonst habe ich es genau so gemacht wie du... auf F450 gedrückt und installiert.
Wenn man da in die Untermenüs klickt und die ganzen Einstellungen sich ansieht die man noch machen könnte, frage ich mich, wie ich das jemals rausfinden soll...
Du machst mir aber Hoffnung...
Da muß ich noch einiges lesen.
Wozu man beim Wizzard an der Funke plötzlich diverse Schalter belegen muß, verstehe ich auch nicht.
Eigentlich reichen doch 4 für die Steuerung und ein weiterer für die Flugmodi !
Nun habe ich plötzlich 8 Kanäle belegt und weiß eigentlich garnicht wofür ??
Sonst habe ich es genau so gemacht wie du... auf F450 gedrückt und installiert.
Wenn man da in die Untermenüs klickt und die ganzen Einstellungen sich ansieht die man noch machen könnte, frage ich mich, wie ich das jemals rausfinden soll...
Du machst mir aber Hoffnung...
Im Wizard musst Du auch nicht alle Schalter belegen. Nimm nur die, die Du auch brauchst, die anderen einfach Finger von lassen.
Expo, gut das lässt sich googlen. Im Prinzip ist das nur wie stark/schwach die Steuerung auf deine Knüppelbewegung reagieren soll. + Werte = Träger, - Werte = Agiler
Die PID lassen sich auch easy erfliegen, so lange in 5er Schritten erhöhen bis der Copter wobbeln beginnt, dann wieder 5 Schritte zurück und passt.
Rest sind Vorlieben.
Ich zum Beispiel teste gerade aus, wie ich es hinbekomme im Rattitude Mode eine vernünftiges Setup zu finden, zwischen Eigenstabil und Agilität um schöne runde Loopings zu fliegen.
Man muß also um die richtigen Werte zu erfliegen, immer ein Laptop zum fliegen mitnehmen um über den Wizzard die Werte neu einzugeben.
Irgendwo habe ich gelesen, dass man die Werte auch über ein Poti an der Funke manuell ändern kann.
Das muß ich mir erst noch "erlesen". Grundsätzlich dürfte das über die Taranis alles möglich sein und wäre sehr praktisch.
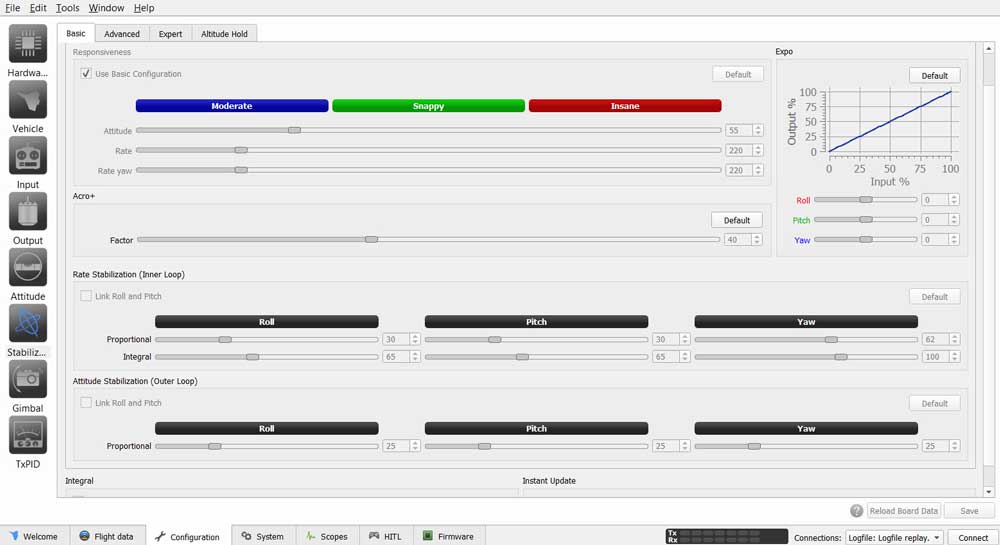
Mir wäre schon wichtig zu wissen, welcher Werte zu welchen Reaktionen führen..
Hoher Expo-Wert -> Träger.
Was Roll/Pitch/Throttle/Yaw bedeuten ist mir schon klar (glaube ich zumindest)
Aber was bedeutet
Proportional, Integral, Rate, RateYaw.
Dann wird unterschieden in InterLoop und OuterLoop... (nagut, das kann ich mir noch vorstellen...)
Wobei das ja noch die Basic-Einstellungen sind. Im Advanced Mode, Expert-Mode, Altitude-Hold wird es ja noch ungemütlicher.
Leider bin ich schon etwas älter, und da tut man sich mit dem Englisch nicht mehr ganz so leicht.
Mal eben so die Wiki durchlesen und verstehen ist nicht so einfach.
naja... will euch nicht länger belästigen
Irgendwo habe ich gelesen, dass man die Werte auch über ein Poti an der Funke manuell ändern kann.
Das muß ich mir erst noch "erlesen". Grundsätzlich dürfte das über die Taranis alles möglich sein und wäre sehr praktisch.
Mir wäre schon wichtig zu wissen, welcher Werte zu welchen Reaktionen führen..
Hoher Expo-Wert -> Träger.
Was Roll/Pitch/Throttle/Yaw bedeuten ist mir schon klar (glaube ich zumindest)
Aber was bedeutet
Proportional, Integral, Rate, RateYaw.
Dann wird unterschieden in InterLoop und OuterLoop... (nagut, das kann ich mir noch vorstellen...)
Wobei das ja noch die Basic-Einstellungen sind. Im Advanced Mode, Expert-Mode, Altitude-Hold wird es ja noch ungemütlicher.
Leider bin ich schon etwas älter, und da tut man sich mit dem Englisch nicht mehr ganz so leicht.
Mal eben so die Wiki durchlesen und verstehen ist nicht so einfach.
naja... will euch nicht länger belästigen
Ja, Laptop macht anfangs erst mal Sinn mit zu nehmen. Ich hab zum Glück ne große Wiese hinterm Haus ;-)
Eine Deutsche Erklärung, was welcher Schieberegler in welche Richtung bewirkt suche ich auch noch.
Da es so was aber scheinbar nicht gibt, hilft nur ausprobieren...und am besten selber mal eine Deutsche CC3D Anleitung/Erklärung schreiben...da wären bestimmt viele Dankbar für
Eine Deutsche Erklärung, was welcher Schieberegler in welche Richtung bewirkt suche ich auch noch.
Da es so was aber scheinbar nicht gibt, hilft nur ausprobieren...und am besten selber mal eine Deutsche CC3D Anleitung/Erklärung schreiben...da wären bestimmt viele Dankbar für
Frag mich nicht wie man sowas macht, aber ich würde gerne meinen Teil dazu beitragen.
Ich hab das mal irgendwo im Netz oder auch hier gelesen und danach Einstellungen gemacht, hat immer super geklappt und daher hab ich es mir mal kopiert und gebe es auch gerne weiter!
Was ist PID?
Wenn die Copter Stellung um die Nick / Roll / Gier-Achse verändert wird, zeigen die Gyros, die auftretenden Kräfte bei der Winkeländerung . Durch die Verwendung einer "PID" Programmschleife, wird der Motor angesteuert. Dieser Algorithmus versucht den Copter zu stabilisieren, durch eine Kombination aus der gemessenen Winkelabweichung, Probenahme der Veränderung über Zeit und die Vorhersage der Zukunft. Dies bietet genügend Informationen für die Steuerung der Motoren um das Gleichgewicht zu halten. P ist der dominierende Teil der PID und bringt uns auf das Spielfeld für gute Flugeigenschaften.
Verständnis der Auswirkungen von P, I und D
P (Proportional) - ist die Menge der Korrekturkraft welche den Copter in seine Ausgangsposition zurück bringt. Wenn der P-Wert zu hoch ist, kann es bei der Rückkehr in die Ausgangsposition zu einem überschwingen kommen. Dann wird entgegengesetzt gerichtete Kraft benötigt, um zu kompensieren. Dies schafft eine oszillierende Wirkung, bis die Stabilität schließlich erreicht ist oder in fatalen Fällen völlig destabilisiert wird.
I (Integral) - ist der Zeitraum, in welchem die Winkeländerung abgetastet und ermittelt wird. Umso länger eine Abweichung besteht, umso höher werden die Motoren drehen um gegenzusteuern. Bis zu maximalem Schub.
Ein höherer I- Wert verbessert die Heading Hold Funktion.
D (Differential) - ist die Geschwindigkeit, mit der MultiRotor in seine ursprüngliche Position zurückgekehrt. Wenn D erhöht wird , will der Quadrocopter schneller in seine Ausgangslage zurück schnappen.
Grundlegendes PID Tuning - auf dem Boden
In der Software setzen wir P I und D auf die vom Designer standardmäßig empfohlenen Einstellungen. Dies geschieht auch beim Upload einer neuen Firmware.
-Für stabilen Flug (FPV/Video/Foto):
P erhöhen, bis der Copter zu schwingen beginnt. Dann wieder etwas senken.
I verringern bis der Ausgleich von Abweichungen nicht mehr akzeptabel ist, dann wieder leicht erhöhen.
D verringern bis die Rückkehr von drastischen Steuereingaben nicht mehr akzeptabel ist. (Wir erinnern uns, das bedeutet eine höhere Zahl, weil es ein negativer Wert ist - also weiter unter Null) Dann wieder leicht erhöhen.
Eventuell muss P nun noch leicht reduziert werden.
-Für Kunstflug:
P erhöhen, bis der Copter zu schwingen beginnt. Dann wieder etwas senken.
I verringern bis der Ausgleich von Abweichungen nichtmehr akzeptabel ist, dann wieder leicht erhöhen.
D erhöhen bis die Rückkehr von drastischen Steuereingaben nichtmehr akzeptabel ist. (Wir erinnern uns, das bedeutet eine niedrigere Zahl, weil es ein negativer Wert ist - also weiter Richtung Null) Dann wieder leicht verringern.
Eventuell muss P nun noch leicht reduziert werden.
Wir müssen einen Kompromiss der optimalen Einstellungen für einen stabilen Schwebeflug und unserer typischen Flugart akzeptieren.
Ich hab das mal irgendwo im Netz oder auch hier gelesen und danach Einstellungen gemacht, hat immer super geklappt und daher hab ich es mir mal kopiert und gebe es auch gerne weiter!
Was ist PID?
Wenn die Copter Stellung um die Nick / Roll / Gier-Achse verändert wird, zeigen die Gyros, die auftretenden Kräfte bei der Winkeländerung . Durch die Verwendung einer "PID" Programmschleife, wird der Motor angesteuert. Dieser Algorithmus versucht den Copter zu stabilisieren, durch eine Kombination aus der gemessenen Winkelabweichung, Probenahme der Veränderung über Zeit und die Vorhersage der Zukunft. Dies bietet genügend Informationen für die Steuerung der Motoren um das Gleichgewicht zu halten. P ist der dominierende Teil der PID und bringt uns auf das Spielfeld für gute Flugeigenschaften.
Verständnis der Auswirkungen von P, I und D
P (Proportional) - ist die Menge der Korrekturkraft welche den Copter in seine Ausgangsposition zurück bringt. Wenn der P-Wert zu hoch ist, kann es bei der Rückkehr in die Ausgangsposition zu einem überschwingen kommen. Dann wird entgegengesetzt gerichtete Kraft benötigt, um zu kompensieren. Dies schafft eine oszillierende Wirkung, bis die Stabilität schließlich erreicht ist oder in fatalen Fällen völlig destabilisiert wird.
I (Integral) - ist der Zeitraum, in welchem die Winkeländerung abgetastet und ermittelt wird. Umso länger eine Abweichung besteht, umso höher werden die Motoren drehen um gegenzusteuern. Bis zu maximalem Schub.
Ein höherer I- Wert verbessert die Heading Hold Funktion.
D (Differential) - ist die Geschwindigkeit, mit der MultiRotor in seine ursprüngliche Position zurückgekehrt. Wenn D erhöht wird , will der Quadrocopter schneller in seine Ausgangslage zurück schnappen.
Grundlegendes PID Tuning - auf dem Boden
In der Software setzen wir P I und D auf die vom Designer standardmäßig empfohlenen Einstellungen. Dies geschieht auch beim Upload einer neuen Firmware.
-Für stabilen Flug (FPV/Video/Foto):
P erhöhen, bis der Copter zu schwingen beginnt. Dann wieder etwas senken.
I verringern bis der Ausgleich von Abweichungen nicht mehr akzeptabel ist, dann wieder leicht erhöhen.
D verringern bis die Rückkehr von drastischen Steuereingaben nicht mehr akzeptabel ist. (Wir erinnern uns, das bedeutet eine höhere Zahl, weil es ein negativer Wert ist - also weiter unter Null) Dann wieder leicht erhöhen.
Eventuell muss P nun noch leicht reduziert werden.
-Für Kunstflug:
P erhöhen, bis der Copter zu schwingen beginnt. Dann wieder etwas senken.
I verringern bis der Ausgleich von Abweichungen nichtmehr akzeptabel ist, dann wieder leicht erhöhen.
D erhöhen bis die Rückkehr von drastischen Steuereingaben nichtmehr akzeptabel ist. (Wir erinnern uns, das bedeutet eine niedrigere Zahl, weil es ein negativer Wert ist - also weiter Richtung Null) Dann wieder leicht verringern.
Eventuell muss P nun noch leicht reduziert werden.
Wir müssen einen Kompromiss der optimalen Einstellungen für einen stabilen Schwebeflug und unserer typischen Flugart akzeptieren.
Also ne Anleitung wie man die PID-Werte einstellt und was sie bewirken kann ich liefern wenn bedarf besteht, ist allerdings allgemein gehalten und nicht aufs CC3D zugeschnitten. Aber ich denke wenn man weiß was wann wodurch passiert ist es auch verständlicher!
Edit:
Da war einer schneller..
Eine sehr gute Erklärung und Veranschaulichung: http://www.technik-consulting.eu/Optimierung/Quadrocopter_PID-Regelung.html
Schaue dir das mal an.
Für jemanden der sich mit Regelkreisen oder Regelungstechnik nicht auskennt ist der Artikel lesenswert.
Schaue dir das mal an.
Für jemanden der sich mit Regelkreisen oder Regelungstechnik nicht auskennt ist der Artikel lesenswert.
Mit ein bisschen suchen findet man hier im Forum auch das: http://fpv-community.de/showthread.php?60425-PID-Tuning-bei-Openpilot-So-wirds-gemacht!
Ansonsten bin ich auch noch Anfänger, man findet viel im Netz, z.B. OpenPilot Wiki, aber ist halt fast alles Englisch.
Edit:
Hier hatte ich ja mal kurz ein paar Flugmodi beschrieben: http://fpv-community.de/showthread....PID-Feintuning&p=826845&viewfull=1#post826845
Ansonsten noch die Englischsprachigen Wiki Einträge:
Hier mal die Beschreibung aus Taulabs: https://github.com/TauLabs/TauLabs/wiki/Flightmode-Settings#individual-axis-modes
und was zu den PID Einstellungen: https://github.com/TauLabs/TauLabs/wiki/OnlineHelp:-Stabilization-Panel
Ansonsten bei OpenPilot: https://wiki.openpilot.org/display/WIKI/Input+-+Flight+Modes+-+Arming
Ansonsten bin ich auch noch Anfänger, man findet viel im Netz, z.B. OpenPilot Wiki, aber ist halt fast alles Englisch.
Edit:
Hier hatte ich ja mal kurz ein paar Flugmodi beschrieben: http://fpv-community.de/showthread....PID-Feintuning&p=826845&viewfull=1#post826845
Ansonsten noch die Englischsprachigen Wiki Einträge:
Hier mal die Beschreibung aus Taulabs: https://github.com/TauLabs/TauLabs/wiki/Flightmode-Settings#individual-axis-modes
und was zu den PID Einstellungen: https://github.com/TauLabs/TauLabs/wiki/OnlineHelp:-Stabilization-Panel
Ansonsten bei OpenPilot: https://wiki.openpilot.org/display/WIKI/Input+-+Flight+Modes+-+Arming
Zuletzt bearbeitet:

