Mit 5V.
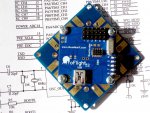
Habe das Kabel direkt an die Pinleiste gelötet wo man auch das Zeug vom Empfänger ansteckt.
Irgendwas läuft da beim initialisieren des GPS schief, weil da wo es nicht geht leuchtet die LED immer und geht nicht wie normal bei fix in blinkend über. Wenn ich mit dem PC an TX vom GPS geh kommt trotzdem ein binärer Satz. Aber wohl nicht der Richtige.
Habe das Kabel direkt an die Pinleiste gelötet wo man auch das Zeug vom Empfänger ansteckt.
Irgendwas läuft da beim initialisieren des GPS schief, weil da wo es nicht geht leuchtet die LED immer und geht nicht wie normal bei fix in blinkend über. Wenn ich mit dem PC an TX vom GPS geh kommt trotzdem ein binärer Satz. Aber wohl nicht der Richtige.
")