
OXSENS OPenXsensor: Ein schneller Einstieg
- Themenstarter strgaltdel
- Beginndatum
Das ist ein altes Thema.
Ich habe bei mir ca. 18 Satelliten geloggt und trotzdem schwanken die Daten. Das ist systembedingt.
Außerdem wird die GPS Position nicht dauernd übertagen. so 2-3 mal die Sekunde.
Ich habe GPS auch in normalen Modellen.
Zecks wiederauffinden bei Außenlandungen.
Wenn ein Modell außer Reichweite geflogen ist, nützt das nichts.
Wenn ein Modell im 4 ha großen Getreidefeld liegt, meist auch nichts.
Ich hatte einen Absturz. Die letzte übertrage Position war über 100m woanders.
Ich habe bei mir ca. 18 Satelliten geloggt und trotzdem schwanken die Daten. Das ist systembedingt.
Außerdem wird die GPS Position nicht dauernd übertagen. so 2-3 mal die Sekunde.
Ich habe GPS auch in normalen Modellen.
Zecks wiederauffinden bei Außenlandungen.
Wenn ein Modell außer Reichweite geflogen ist, nützt das nichts.
Wenn ein Modell im 4 ha großen Getreidefeld liegt, meist auch nichts.
Ich hatte einen Absturz. Die letzte übertrage Position war über 100m woanders.
Meine Erfahrungen sind da etwas anders, meist fliege ich recht schnelle Segler Modelle, die alle mit einem OXS ausgestattet sind.
Auch bei GPS Modulen gibt es Unterschiede, selbst bei Baugleichen BN China Modulen aus einer Lieferung kann es vorkommen das eins dabei ist was echt Empfang Schwierigkeiten hat, testen kann man das auf dem Schreibtisch im Parallelbetrieb, meist merkt man es schon an der Zeit bis zum FIX das eine ist erwartungsgemäß in 5 Sekunden da, das schlechte eiert ewig rum und humpelt immer hinter her.
Das sind aber nur meine Erfahrungen und keine Fakts, vielleicht hilft´s dem ein oder anderen sein Problem zu finden.
Früher waren es andere Käufliche Sensoren, da konnte ich die beschrieben Symptome auch beobachten, ob das bei jedem käuflichen so ist kann ich aber nicht sagen, vielleicht war meiner nur ein Montags Modell...
Es gibt sicherlich in jedem Modell stellen wo das GPS nicht die allerbesten Empfangseigenschaften hat,
z.b wären da CFK, Akku und auch die RX Antennen verschlechtern oder können den Empfang oder Genauigkeit deutlich verschlechtern oder sogar gänzlich verhindern.
Aber selbst in meinen "Besenstiel" Rümpfen finde ich immer eine Ecke wo das alles passt.
Die durchschnittlich empfangenen Satelliten liegen so bei 22, an guten Tagen sogar 30.
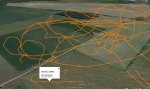
Bestätigen kann ich das bei rollen oder recht wilden rum Turnereien der Genauigkeitswert HDOP / PDOD etwas schlechter wird, aber immer noch so gut ist das die Position auf ca 1,5-2,5m genau ist.
Nach meinen Erfahrungen ist es auch nicht sooo wichtig die Antenne mit Sicht nach oben auszurichten, in einigen Modellen habe ich aus Platzgründen die Antenne Senkrecht im Rumpf Montiert, in nachfolgenden Scrennshot ist die Antenne auch senkrecht verbaut, funktioniert aber prima.
Schön überprüfen kann man das, in dem man die 3D Distanz im Display anzeigt diese bei Start auf "0" setzt und wenn nach der Landung der angezeigte Wert zwischen 0-3m zeigt passt alles.
Verzögerungen kann ich nicht wirklich feststellen, beobachte ich den Wert 3D Distanz und bewege meinen Flieger vom null Punkt weg ändert sich sofort der Wert ohne Sekundenlange Verzögerungen.
Hier ein Screenshot aus so einem Teil zum rum turnen und heizen.

Auch bei GPS Modulen gibt es Unterschiede, selbst bei Baugleichen BN China Modulen aus einer Lieferung kann es vorkommen das eins dabei ist was echt Empfang Schwierigkeiten hat, testen kann man das auf dem Schreibtisch im Parallelbetrieb, meist merkt man es schon an der Zeit bis zum FIX das eine ist erwartungsgemäß in 5 Sekunden da, das schlechte eiert ewig rum und humpelt immer hinter her.
Das sind aber nur meine Erfahrungen und keine Fakts, vielleicht hilft´s dem ein oder anderen sein Problem zu finden.
Früher waren es andere Käufliche Sensoren, da konnte ich die beschrieben Symptome auch beobachten, ob das bei jedem käuflichen so ist kann ich aber nicht sagen, vielleicht war meiner nur ein Montags Modell...
Es gibt sicherlich in jedem Modell stellen wo das GPS nicht die allerbesten Empfangseigenschaften hat,
z.b wären da CFK, Akku und auch die RX Antennen verschlechtern oder können den Empfang oder Genauigkeit deutlich verschlechtern oder sogar gänzlich verhindern.
Aber selbst in meinen "Besenstiel" Rümpfen finde ich immer eine Ecke wo das alles passt.
Die durchschnittlich empfangenen Satelliten liegen so bei 22, an guten Tagen sogar 30.
Bestätigen kann ich das bei rollen oder recht wilden rum Turnereien der Genauigkeitswert HDOP / PDOD etwas schlechter wird, aber immer noch so gut ist das die Position auf ca 1,5-2,5m genau ist.
Nach meinen Erfahrungen ist es auch nicht sooo wichtig die Antenne mit Sicht nach oben auszurichten, in einigen Modellen habe ich aus Platzgründen die Antenne Senkrecht im Rumpf Montiert, in nachfolgenden Scrennshot ist die Antenne auch senkrecht verbaut, funktioniert aber prima.
Schön überprüfen kann man das, in dem man die 3D Distanz im Display anzeigt diese bei Start auf "0" setzt und wenn nach der Landung der angezeigte Wert zwischen 0-3m zeigt passt alles.
Verzögerungen kann ich nicht wirklich feststellen, beobachte ich den Wert 3D Distanz und bewege meinen Flieger vom null Punkt weg ändert sich sofort der Wert ohne Sekundenlange Verzögerungen.
Hier ein Screenshot aus so einem Teil zum rum turnen und heizen.
Zuletzt bearbeitet:
Hier noch mal eine Gegenüberstellung von GPS Höhe und Baro Höhe, verzögert sieht das für mich nicht aus.
Auch die bis zu 30 Satelliten habe ich mal eingeblendet und den PDOD den genauigkeitwert der Position.
Für alle die mit PDOD nix anzufangen wissen, je niedriger der Wert ist um so genauer die Position, Werte um 1 sind super.
Hier wird es etwas ausführlicher erklärt Dilution of Precision – Wikipedia
Ich denke damit sollten alle zweifel ausgeräumt sein.
Man könnte fast die GPS Höhe als Vario nutzen, wenn man nicht gerade in Ameisen Kniehöhe und in den Ameisen Pupsen aufsteigenden warmen Luft kreisen will, den da ist da Barometrische Vario einen ticken besser.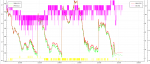
Auch die bis zu 30 Satelliten habe ich mal eingeblendet und den PDOD den genauigkeitwert der Position.
Für alle die mit PDOD nix anzufangen wissen, je niedriger der Wert ist um so genauer die Position, Werte um 1 sind super.
Hier wird es etwas ausführlicher erklärt Dilution of Precision – Wikipedia
Ich denke damit sollten alle zweifel ausgeräumt sein.
Man könnte fast die GPS Höhe als Vario nutzen, wenn man nicht gerade in Ameisen Kniehöhe und in den Ameisen Pupsen aufsteigenden warmen Luft kreisen will, den da ist da Barometrische Vario einen ticken besser.
Zuletzt bearbeitet:
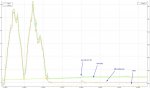
Ich habe mal das Neo7M ausgewertet.
Mit ca. 12 Satelliten, ruhige Lage, keinerlei Bewegung.
Verzögerung nicht berücksichtigt.
Die Höhe schwankt ständig mindestens +/- 10 m.
Also als Vario völlig ungeeignet. Bei der Höhenangabe kommt es nicht so genau drauf an, normalerweise.
Die horizontale Position um die 25 m.
Aussetzer habe ich eigentlich ni feststellen können, egal in welcher Fluglage.
Auch bei Rückenflug nicht !
Beim GPS sind Satelliten am Horizont wichtiger als die am Zenit.
Macht mal einen Versuch :
Fliegt mit dem Modell mal so 80 kmh und stellt an einem Fixpunkt den Motor kurz ab.
Und vergleicht hinterher mit den LOG-Daten die GPS-Position, wo der Motor abgeschaltet wurde.
Und gebt mal beim Vario als Quelle GPS-Höhe an.
Dann ist das Vario ständig am piepsen, auch wenn das Modell nicht bewegt wird.
Mit ca. 12 Satelliten, ruhige Lage, keinerlei Bewegung.
Verzögerung nicht berücksichtigt.
Die Höhe schwankt ständig mindestens +/- 10 m.
Also als Vario völlig ungeeignet. Bei der Höhenangabe kommt es nicht so genau drauf an, normalerweise.
Die horizontale Position um die 25 m.
Aussetzer habe ich eigentlich ni feststellen können, egal in welcher Fluglage.
Auch bei Rückenflug nicht !
Beim GPS sind Satelliten am Horizont wichtiger als die am Zenit.
Macht mal einen Versuch :
Fliegt mit dem Modell mal so 80 kmh und stellt an einem Fixpunkt den Motor kurz ab.
Und vergleicht hinterher mit den LOG-Daten die GPS-Position, wo der Motor abgeschaltet wurde.
Und gebt mal beim Vario als Quelle GPS-Höhe an.
Dann ist das Vario ständig am piepsen, auch wenn das Modell nicht bewegt wird.
Ich habe mal das Neo7M ausgewertet.
Mit ca. 12 Satelliten, ruhige Lage, keinerlei Bewegung.
Verzögerung nicht berücksichtigt.
Die Höhe schwankt ständig mindestens +/- 10 m.
Also als Vario völlig ungeeignet. Bei der Höhenangabe kommt es nicht so genau drauf an, normalerweise.
Die horizontale Position um die 25 m.
Mit ca. 12 Satelliten, ruhige Lage, keinerlei Bewegung.
Verzögerung nicht berücksichtigt.
Die Höhe schwankt ständig mindestens +/- 10 m.
Also als Vario völlig ungeeignet. Bei der Höhenangabe kommt es nicht so genau drauf an, normalerweise.
Die horizontale Position um die 25 m.
Und gebt mal beim Vario als Quelle GPS-Höhe an.
Zuletzt bearbeitet:
Zum GPS hätte ich da auch noch eine Frage. Ich hab Mal ein TAROT verbaut mit dem ich nicht so recht glücklich war/bin. Ich hab das Mal getestet und es hat Ewigkeiten gedauert bis ich einen Fix hatte. Hab's nun gerade nochmal rausgekramt und mit Strom versorgt: Rote LED geht kurz an, dann blinkt die blaue Hecktisch -> Video 1. Nach einiger Zeit blinkt die rote zusätzlich -> Video 2 . Wie sollte das sein wenn's funktioniert ?
Anhänge
-
6,1 MB Aufrufe: 9
-
7,2 MB Aufrufe: 9
Ich würde sagen, dass das blaue Blinken die Datenpakete sind, die sofort nach der Initialisierung fließen und die rote LED signalisiert dann den internen GPS Fix, der aber noch nicht gut genug für oXs sein muss. Eventuell gibt oXs erst einige Sekunden bis Minuten (bei ungünstigem Empfang) später GPS Daten aus.
Wie erklärst du dir, dass ich mit dem openXsensor lesbar oXs auf eine 4m breite Straße schreiben kann? Das ist ein krasser Widerspruch zu deiner Auswertung.
Dann schreibe doch mal, mit was für Komponenten du das schaffst.
Wenn ein Neo 8M, direkt mit U-Blox abgefragt, die Daten bringt, die ich angegeben habe,
muß schon eine etwas andere Hardware dahinterstecken.
Dann schreibe doch mal, mit was für Komponenten du das schaffst.
Wenn ein Neo 8M, direkt mit U-Blox abgefragt, die Daten bringt, die ich angegeben habe,
muß schon eine etwas andere Hardware dahinterstecken.
Das hier ist der openXsensor Thread. Gegenvorschlag: Bau dir einen und stelle selbst den Test nach und stelle dein Ergebnis hier ein, dann diskutieren wir das.
Ich weiß, am Schreibtisch mit u-Center rumspielen ist einfacher und man friert nicht") Aber wir wollen doch fundierte Aussagen machen und nicht schwadronieren.
Aber wir wollen doch fundierte Aussagen machen und nicht schwadronieren.
Ich weiß, am Schreibtisch mit u-Center rumspielen ist einfacher und man friert nicht
Aber wir wollen doch fundierte Aussagen machen und nicht schwadronieren.
Ich habe mal das Neo7M ausgewertet.
Mit ca. 12 Satelliten, ruhige Lage, keinerlei Bewegung.
Verzögerung nicht berücksichtigt.
Die Höhe schwankt ständig mindestens +/- 10 m.
Mit ca. 12 Satelliten, ruhige Lage, keinerlei Bewegung.
Verzögerung nicht berücksichtigt.
Die Höhe schwankt ständig mindestens +/- 10 m.
Beim GPS sind Satelliten am Horizont wichtiger als die am Zenit.
Macht mal einen versuch
es wurde doch schon alles versucht, gesagt und gezeigt...
Vielleicht musst du einen evt. Fehler in deiner Hardware oder Konfig suchen und noch etwas weiter versuchen.
Hier die Antwort vom Chef zum GPS Fix:
"The GPS has several levels of fix.
I think the led is blinking when the first level is reached (I think it is 2D fix)
oXs start sending only from the next level (I think it is 3D fix). I presume it requires more satellites."
Das heißt, das GPS blinkt schon beim 2D Fix, oXs wartet aber auf den 3D Fix, der natürlich auch bessere 2D Genauigkeit mitbringt. Die Info 2D/3D Fix kommt vom GPS selbst.
@RayX Schön, dass du wieder an Bord bist
"The GPS has several levels of fix.
I think the led is blinking when the first level is reached (I think it is 2D fix)
oXs start sending only from the next level (I think it is 3D fix). I presume it requires more satellites."
Das heißt, das GPS blinkt schon beim 2D Fix, oXs wartet aber auf den 3D Fix, der natürlich auch bessere 2D Genauigkeit mitbringt. Die Info 2D/3D Fix kommt vom GPS selbst.
@RayX Schön, dass du wieder an Bord bist
Was solls ....
Ich habe mehrere OpenXsensor mit GPS etc. gebaut.
Da ist auch nichts genauer ...
Wie soll ein GPS-Baustein, daß mit UBlox Schwankungen anzeigt,
mit OpenXSensor genauer sein ?
Ich habe davon schon mehrere Bilder ins Netz gestellt.
Aber wenn es jemand besser machen kann, dann ist das ja schön.
Aber dann auch sagen wie !
Ich habe mehrere OpenXsensor mit GPS etc. gebaut.
Da ist auch nichts genauer ...
Wie soll ein GPS-Baustein, daß mit UBlox Schwankungen anzeigt,
mit OpenXSensor genauer sein ?
Ich habe davon schon mehrere Bilder ins Netz gestellt.
Aber wenn es jemand besser machen kann, dann ist das ja schön.
Aber dann auch sagen wie !
Aber dann auch sagen wie !
Ich wollte eigentlich den oXs-Baro-Sensor mit dem SM-Senosor vergleichen, hatte aber zusätzlich noch das oXs-GPS (Beintian BN180) drin.
Die Grafik zeigt m. M. eine erstaunlich gute Übereinstimmung.
Mit dem Neo-M8N hatte ich keine positiven Erlebnisse. Die waren - warum auch immer - nach kürzester Zeit defekt. Das Gegenteil kann ich von den BN180 und BN220 berichten. Die tun sehr zuverlässung und m. M. nach genau ihren Dienst.
Zuletzt bearbeitet:
Schon bemerkenswert wie manch einer einfach Daten und Fakten ignoriert und anscheinend die Unterschiede nicht sieht oder sehen will 12 Satelliten bei bei dir und bis zu 30 im Log gezeigte ist keine unterschied.
Dann wäre da, du hast dein Modul auf dem Schreibtisch drinnen unterm Hausdach ruhig liegen, im Log wurde wirklich geflogen, so richtig unter freiem Himmel und nicht am Sym.
Auch ist im Log zu sehen das der PDOP nahe 1 teils sogar unter 1 ist, hätte man jetzt diesen Link mal gelesen wäre vielleicht ein Lich aufgegangen, das hier etwas anders sein muss, anstatt einfach alles anzuzweifeln.
Wie es geht steht hier ein paar Posts weiter oben, oder hier noch mal verlinkt, oder ignorierst du einfach alles was andere schreiben, scheint fast so.
Auch die verwendeten GPS Module werden hier genannt, sorry ich vergas... dazu müsste man auch lesen und nicht nur schreiben.
Was oder wie soll man helfen wenn du nichts fragst, was erwartest du... mit der Anmerkung
sondern einfach alle Fakten kurz reden willst ?
Schön wenn du irgendwelche Bilder irgendwo im Netz eingestellt hast auf denen bestimmt auch deine schlechteren Ergebnisse zu sehen sind, aber was nützt das ??? hier wurde Dir jetzt mehrmals gezeigt das es wohl besser geht... oder etwas nicht ?
Zauberei ist es nicht, es handelt sich um stink normale billig China Hardware die hier jetzt X mal genannt wurde, auch der Sketch ist ganz normal wie in jeder hat, ganz normal und hat keine tuningmaßnahmen erhalten.
Ich denke hier wurde jetzt alles gesagt, sinnloses hin und her mit Rechthaberei hat nichts mit
OPenXsensor: Ein schneller Einstieg zu tun.
Danke
@Carbonator ich bin mir noch nicht sicher ob es schön ist
Dann wäre da, du hast dein Modul auf dem Schreibtisch drinnen unterm Hausdach ruhig liegen, im Log wurde wirklich geflogen, so richtig unter freiem Himmel und nicht am Sym.
Auch ist im Log zu sehen das der PDOP nahe 1 teils sogar unter 1 ist, hätte man jetzt diesen Link mal gelesen wäre vielleicht ein Lich aufgegangen, das hier etwas anders sein muss, anstatt einfach alles anzuzweifeln.
Wie es geht steht hier ein paar Posts weiter oben, oder hier noch mal verlinkt, oder ignorierst du einfach alles was andere schreiben, scheint fast so.
Auch die verwendeten GPS Module werden hier genannt, sorry ich vergas... dazu müsste man auch lesen und nicht nur schreiben.
Was oder wie soll man helfen wenn du nichts fragst, was erwartest du... mit der Anmerkung
Aber dann auch sagen wie !
Schön wenn du irgendwelche Bilder irgendwo im Netz eingestellt hast auf denen bestimmt auch deine schlechteren Ergebnisse zu sehen sind, aber was nützt das ??? hier wurde Dir jetzt mehrmals gezeigt das es wohl besser geht... oder etwas nicht ?
Zauberei ist es nicht, es handelt sich um stink normale billig China Hardware die hier jetzt X mal genannt wurde, auch der Sketch ist ganz normal wie in jeder hat, ganz normal und hat keine tuningmaßnahmen erhalten.
Ich denke hier wurde jetzt alles gesagt, sinnloses hin und her mit Rechthaberei hat nichts mit
OPenXsensor: Ein schneller Einstieg zu tun.
Danke
@Carbonator ich bin mir noch nicht sicher ob es schön ist
Manch wollen hier einfach recht haben ....
Ich sage nur, was ich gemessen habe.
z.B. nur das GPS Modul N8M am Laptop mit U-Blox ausgelesen, unter freiem Himmel, Hdop 0,9 mit 16 Satelliten.
Und da schwanken die Werte. Höhe und Position um viele Meter.
Diese Messung ist jederzeit reproduzierbar !
Das wird hier ignorier !
Ich sage nur, was ich gemessen habe.
z.B. nur das GPS Modul N8M am Laptop mit U-Blox ausgelesen, unter freiem Himmel, Hdop 0,9 mit 16 Satelliten.
Und da schwanken die Werte. Höhe und Position um viele Meter.
Diese Messung ist jederzeit reproduzierbar !
Das wird hier ignorier !

