
FRSKY Vorsicht bei "Telemetrie verloren" mit Horus
- Themenstarter Carbonator
- Beginndatum
Obwohl ich null Ahnung habe, was das heißt 
Ich hab das ne Weile quasi Hauptberuflich gemacht
Ich habe gerade nochmal ein paar Messungen mit HackRF und SDR# gemacht.
Wenn man in SDR# unter der Rubrik 'Display' bei Smoothing S-Attack und S-Decay auf 0 setzt, erhält man ganz vernünftige Bilder im Spektrum Analyzer

Damit habe ich nochmal meine Sender mit dem X6R Empfänger vermessen:
X9D+2019 an X6R: Mittenfrequenz 2404,976 MHz --> Ablage -24kHz
X9D+ an X6R: Mittenfrequenz 2404,957 MHz --> Ablage -43kHz
Dann habe ich noch einen Versuch mit dem Multiprotokollmodul gemacht, um die Empfängerfrequenz zu bestimmen. Dazu habe ich den X6R erst an das MPM gebunden (FrSky LBT EU) und dann die Frequenz des MPM nach unten/oben verstimmt, bis die rote LED am Empfänger geleuchtet hat. Die Mittenfrequenz zwischen diesen beiden Extremen sollte dann die Empfängerfrequenz sein:
MPM Verstimmung -64 -> Telemetry lost, rote LED --> Frequenz des MPM beim Binden 2404,848MHz
MPM Verstimmung +71 -> Telemetry lost, rote LED -> Frequenz des MPM beim Binden 2405,063 MHz
Einstellung des MPM auf +4 (Mitte -64..+71) --> Frequenz des MPM beim Binden 2404,955 MHz
Das sollte dann auch die Empfängerfrequenz sein. Der Empfänger liegt also 45kHz daneben (was perfekt zu der X9D passt).
Dieser Versuch zeigt auch, dass eine Messung der Empfängerfrequenz über das Messen der Quarzfrequenz mit dem HackRF keine vernünftigen Ergebnisse bringt (der Versuch hatte -56kHz ergeben).
Der Fangbereich des Empfängers beträgt etwa 215 kHz
Wenn man in SDR# unter der Rubrik 'Display' bei Smoothing S-Attack und S-Decay auf 0 setzt, erhält man ganz vernünftige Bilder im Spektrum Analyzer
Damit habe ich nochmal meine Sender mit dem X6R Empfänger vermessen:
X9D+2019 an X6R: Mittenfrequenz 2404,976 MHz --> Ablage -24kHz
X9D+ an X6R: Mittenfrequenz 2404,957 MHz --> Ablage -43kHz
Dann habe ich noch einen Versuch mit dem Multiprotokollmodul gemacht, um die Empfängerfrequenz zu bestimmen. Dazu habe ich den X6R erst an das MPM gebunden (FrSky LBT EU) und dann die Frequenz des MPM nach unten/oben verstimmt, bis die rote LED am Empfänger geleuchtet hat. Die Mittenfrequenz zwischen diesen beiden Extremen sollte dann die Empfängerfrequenz sein:
MPM Verstimmung -64 -> Telemetry lost, rote LED --> Frequenz des MPM beim Binden 2404,848MHz
MPM Verstimmung +71 -> Telemetry lost, rote LED -> Frequenz des MPM beim Binden 2405,063 MHz
Einstellung des MPM auf +4 (Mitte -64..+71) --> Frequenz des MPM beim Binden 2404,955 MHz
Das sollte dann auch die Empfängerfrequenz sein. Der Empfänger liegt also 45kHz daneben (was perfekt zu der X9D passt).
Dieser Versuch zeigt auch, dass eine Messung der Empfängerfrequenz über das Messen der Quarzfrequenz mit dem HackRF keine vernünftigen Ergebnisse bringt (der Versuch hatte -56kHz ergeben).
Der Fangbereich des Empfängers beträgt etwa 215 kHz
Der Bereich von 215kHz bis zum Abriss der Verbindung stimmt mit meinen Messungen sehr gut überein.
Allerdings würde ich den Fangbereich des Empfängers als den Bereich definieren, bei welchem die ersten Beeinträchtigungen der Verbindung auftreten, das ist der Randbereich des AFC.
Beim X6R wird der CC2500 auf einen AFC Wert von 56kHz initialisiert, gemäß Protokoll der SPI Schnittstelle.
Also sollte man innerhalb dieser Grenzen liegen, die sich allerdings besonders bei LBT schwierig messen lassen, da immer ein paar FLs auftreten.
Allerdings würde ich den Fangbereich des Empfängers als den Bereich definieren, bei welchem die ersten Beeinträchtigungen der Verbindung auftreten, das ist der Randbereich des AFC.
Beim X6R wird der CC2500 auf einen AFC Wert von 56kHz initialisiert, gemäß Protokoll der SPI Schnittstelle.
Also sollte man innerhalb dieser Grenzen liegen, die sich allerdings besonders bei LBT schwierig messen lassen, da immer ein paar FLs auftreten.
Zuletzt bearbeitet:
Die FrSky "Norm" scheint also bei rund 40-50kHz unter 2404/2405MHz zu liegen. Jetzt gilt es, die zulässige Toleranz herauszufinden, bei der noch keine Nachteile auftreten. Artis 2405.022MHz sind ja offensichtlich zu viel für eine sichere Funktion.
Jetzt ist interessant, wie FrSky mit den neuen Firmwares die Frequenzabweichung auffängt. Eine offizielle Aussage wird vermutlich nur zur CRC-Geschichte kommen. R9 ACCESS ist heute rausgekommen, aber da gab es keine Auffälligkeiten bezüglich Lockout.
Edit: Öhm, ich gehe mal davon aus, dass FrSky weiß, dass die Frequenzabweichung die eigentliche Ursache für die Lockouts ist. Aber 100% sicher bin ich mir da nicht ....
Jetzt ist interessant, wie FrSky mit den neuen Firmwares die Frequenzabweichung auffängt. Eine offizielle Aussage wird vermutlich nur zur CRC-Geschichte kommen. R9 ACCESS ist heute rausgekommen, aber da gab es keine Auffälligkeiten bezüglich Lockout.
Edit: Öhm, ich gehe mal davon aus, dass FrSky weiß, dass die Frequenzabweichung die eigentliche Ursache für die Lockouts ist. Aber 100% sicher bin ich mir da nicht ....
Zuletzt bearbeitet:
Weis man warum die zwei Höcker da sind. Es sieht doch so aus, als ob der Sender auf zwei Frequenzen neben der Mittenfrequenz sendet. Zwei Frequenzen macht ja auch Sinn. für Digitale Übertragung. Dann sollte zur Trennung der zwei Zustände 0 und 1 aber ein sauberes Tal in der Mitte sein, und nicht nur zwei Höcker in den Frequenzbrei.
Sigi
Sigi
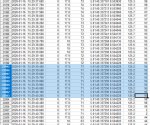
Hi, ich hab gerade eben meinen Frameloss Sensor bei einem Rundflug auf unserem Fluggelände mitgeloggt. HorusX12S mit X8R Empfänger. Auf dem Display hab ich sowohl den momentanen Wert (5100) wie auch den minimalen (5100-) angezeigt. Sowie RSSi und RSSi- . Ergebnis siehe angehängtes Bild. Einmal kam die Meldung "Sensor verloren". An der Steuerung hab ich absolut nix gemerkt. Kein Zucker oder gar Vollausschlag auf einem Ruder. Heute Abend versuche ich mal den Log auszulesen und werde den dannn posten. Aufzeichnungszeit waren 7 Minuten bei 0,1 sek.
Kommentare?
Kommentare?
Anhänge
-
 4,4 MB Aufrufe: 41
4,4 MB Aufrufe: 41



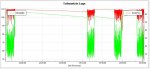

Kommt! Ich hab beim Fliegen absolut nix bemerkt!??
Und die "Lücken" in der Darstellung versteh ich auch nicht.
Und die "Lücken" in der Darstellung versteh ich auch nicht.
Aaa, jetzt verstehe ich. Es wird nur eine Datei für den ganzen Flugtag angelegt. Und in den Pausen war der Sender aus. Ich hab mich schon über die Zeitachse gewundert. Meine Pufferbatterie für dir Uhr ist leer und ich hatte noch keine Lust den Sender.ganz zu öffnen. Die Uhrzeit und das Datum kommt per GPS was ich in der Mule verbaut habe. Werde dann halt mal den Sender öffnen und die Batterie wechseln müssen. 😠
Bist mir mit der Erklärung zuvor gekommen!
P.S. Auf den Glückwunsch hätte ich gerne verzichtet. Ich hab einen zweiten Sensor für einen Kollegen gebaut (auch X12S) der wird den ebenfalls mal mitlaufen lassen. Läuft die Uhrzeit eigentlich auch los wenn der Sender eingeschaltet ist auch wenn die Pufferbatterie leer ist ? Failsave hab ich in keinem meiner Modelle programmiert. Ich bin der Meinung dass das - je nach Fluglage im Moment des Failsave - nur bedingt was bringt.
P.S. Auf den Glückwunsch hätte ich gerne verzichtet. Ich hab einen zweiten Sensor für einen Kollegen gebaut (auch X12S) der wird den ebenfalls mal mitlaufen lassen. Läuft die Uhrzeit eigentlich auch los wenn der Sender eingeschaltet ist auch wenn die Pufferbatterie leer ist ? Failsave hab ich in keinem meiner Modelle programmiert. Ich bin der Meinung dass das - je nach Fluglage im Moment des Failsave - nur bedingt was bringt.
Zuletzt bearbeitet:

