
WING ZOHD Nano Talon EVO
- Themenstarter bubu10
- Beginndatum
Mit set nav_extra_arming_safety = ALLOW_BYPASS kann man einen Bypass der Arming-Funktionalität freischalten. Dafür den Rudder-Stick einmal voll nach rechts bewegen und armen. Dann ist jeder Arming-Check abgeschaltet, armen geht dann auch ohne GPS-Fix etc.
Neustart der FC schaltet die Arming-Prüfungen dann wieder ein.
Neustart der FC schaltet die Arming-Prüfungen dann wieder ein.
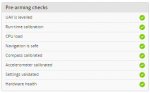
Also, Cam und VTX angeschlossen und festgestellt, dass es an der Kalibration liegt. Obwohl ich die FC in ausgebautem Zustand als erstes kallibriert gehabt habe (hat geklappt, überall die "Gut-Zeichen"), zeigt mir die FC nun in den Pre-arming checks an, dass die accelerometer kalibriert werden müssen. Also, FC ausgebaut, nochmal kalibriert, alles klappte wie am Schnürchen, trotzdem bleibt das rote Kreuz bei accelerometer calibrated. Also nochmal, und nochmal und nochmal.............. ohne Erfolg, kriege dort einfach kein "Gut-Zeichen" hin, obwohl die Kalibration eigentlich perfekt abläuft und ich danach reboot and save klicke.
Komische Sache, dieses iNav. Ich arbeite schon seit etwa 5 Jahren mit Betaflight für die Racecopter......... iNav ist viel komplexer als Betaflight....! Vermutlich werde ich noch ein paar Mal fluchen bis der Vogel ganz sauber fliegt.
Komische Sache, dieses iNav. Ich arbeite schon seit etwa 5 Jahren mit Betaflight für die Racecopter......... iNav ist viel komplexer als Betaflight....! Vermutlich werde ich noch ein paar Mal fluchen bis der Vogel ganz sauber fliegt.
Also, die Kalibrierung hat nun geklappt, es soll mich aber keiner fragen, wieso. Habe alles gemacht wie immer, schön brav mit Holzklötzchen den rechten Winkel vorgegeben usw......! Plötzlich hat die FC das Resultat gefressen und alles ist grün und ich kann armen. Nun gehts an viele kleine Arbeiten und, wenn der GPS Sensor angekommen ist, an den Einbau desselbigen. Ich denke, ich kann schon in etwa 2 Wochen einen kleinen Baubericht online stellen. Ich habe den Vogel mal auf die Waage gestellt. Flugfertig (ohne GPS Sensor) mit einem 3S2200er Akku wiegt das Teil knapp um die 680 Gramm. Finde ich ein gutes Gewicht, mehr als 720 Gramm sollte das Teil allerdings schon nicht werden, wäre dann, für meinen Geschmack, etwas zuviel.
Hallo zusammen
So, auch wenn ich noch nicht ganz fertig bin, möchte ich nun euch meine Version des Nano Talon vorstellen. Dank dem Forum konnte ich doch das eine oder andere Problem lösen, ohne vorher stundenlang zu rätseln und bin so etwas schneller vorwärts gekommen als geplant. Ich baue und fliege schon über 30 Jahre Modellflugzeuge, das Bauen und einstellen war also überhaupt kein Problem, einzig das Programmieren mit iNav machte mir Kopfzerbrechen. Aber dank vielen Videos auf youtube habe ich auch das gut hinbekommen. Im Moment funktioniert alles bis auf die RSSI Ausgabe im OSD. Das Problem scheint nicht einfach zu lösen sein, habe auch schon in einem anderen Thread darüber berichtet und es konnte mir niemand eine Lösung anbieten (ausser den Wechsel auf OpenTx, was für mich allerdings nicht in Frage kommt, da ich keine Lust habe, 15 Modelle neu zu programmieren). Ich habe dem Support von Frsky geschrieben, wo denn der analoge OSD output auf der Platine des RX8R-pro zu finden sein soll, bislang habe ich allerdings keine Antwort bekommen…..!
So, nun zu meiner Nano- Talon Version:
Empfänger:
Wie bereits erwähnt, habe ich einen Frsky RX8R-pro Empfänger verbaut. Zudem habe ich als Satellitenempfänger einen Frsky XM Empfänger gewählt. Diesem habe ich eine 25cm Antenne eingebaut, somit konnte ich die Reichweite des Empfängers etwas erweitern (habs getestet, macht schon ein bisschen was aus). Die eine Antenne des RX8R habe ich in den Flügel verlegt, die andere geht in Richtung abnehmbarem „Schachtdeckel“. Die Antenne des Satellitenempfängers geht nach vorne in den Rumpf. So habe ich so ziemlich alle Richtungen abgedeckt und sollte ein bestmögliches Signal bekommen.
FC:
Als FC habe ich mich für eine Matek F722 entschieden. Der Preisunterschied zwischen der F405 und der F722 ist doch sehr klein und die 722er Version hat noch das eine oder andere Schmankerl auf Lager.
GPS:
Ich habe ein GPS Modul von Matek mit Kompass verbaut. Die genaue Bezeichnung des GPS Moduls weiss ich jetzt nicht gerade auswendig, war auf jeden Fall teurer als andere Module….. ! Wobei ich gelesen habe, dass es den Kompass gar nicht braucht. Egal, was drin ist, ist drin.
Kamera(s):
Da ich kein Fan von zusätzlichen Kameras bin, welche man irgendwo und irgendwie auf ein Modell pappt, habe ich mich für die Caddx Tarsier 4k Kamera entschieden. Dieses Kamerasystem verfügt im Prinzip über zwei Kameras, eine fürs FPV und die andere um das Bild aufzuzeichnen. Geflogen bin ich damit noch nicht, aber das System gefällt. Auf dem Board ist Standardmässig ein Wifi Sender verbaut, so kann man mit dem Handy kontaktlos Einstellungen an der Kamera vornehmen oder auch Videos und Fotos runterladen.
Die Kamera selber passt nicht in das Loch vorne am Rumpf, deswegen musste der Dremel ran und das Loch musste oval gefräst werden. Dann das Kamerabild kontrolliert, so dass nicht noch Ränder auf dem Bild zu sehen sind und das Ganze dann mit UHU- Por reingeklebt. Da die Platine der Kamera eigentlich für Multicopter gedacht ist, konnte ich diese nirgends richtig festmachen. Also habe ich mich dafür entschieden, die Kamera eine eine Art „Behältnis“ zu packen. D.h., ich habe eine Balsaholzplatte passend zugeschnitten und diese als Grenze zum Akkufach eingeklebt. Die Platte habe ich mit dünnem Schaumstoff gepolstert. So wird die Platine einfach nur reingestellt und kann jederzeit „rausgelupft“ werden um die SD Karte aus dem Slot zu nehmen. Schon während dem Bau habe ich bemerkt, dass die Platine ziemlich warm wird. Also musste eine Kühlung her. So habe ich im Deckel, welcher als Öffnung für den Akkueinbau dient, ein Loch reingefräst, welches genau über der Platine endet. So wird mit dem Fahrtwind Luft auf die Platine gedrückt. Damit die Luft auch wieder abfliessen kann, habe ich bei der Balsaholztrennwand vier Löcher reingebohrt, so ist der Luftaustausch gewährleistet.
Als zweite Kamera habe ich eine alte FPV- Kamera genommen, welche bei mir im Keller rumgelegen war. Ist irgendeine CCD Cam, welche ich vor ein paar Jahren mal auf Banggood oder so gekauft habe. Diese Kamera habe ich in den Schacht eingebaut und gerade nach unten gerichtet. Wenn man nun mit offenem Schacht fliegt, kann man zwischendurch mal gerade runterschauen um zu kucken wo man sich eigentlich genau befindet. Mit der Matek F722 hat man die Möglichkeit zwischen zwei FPV Kameras hin und her zu schalten. Finde ich ein witziges Gimmick.
VTX
Als VTX habe ich einen eachine 805 ( mit der Typenbezeichnung bin ich mir nicht mehr so sicher) verbaut. Der lässt sich bis 800mw hochregeln. Die VTX Antenne ist im Schacht verbaut und schaut nicht aus dem Flugzeug raus. Da der Schaum kaum die Sendeleistung beeinträchtigt, es optisch schöner aussieht und keinen Luftwiderstand bietet, habe ich mich für diese Variante entschieden.
Ruderanlenkungen
Ich habe ja mal in einem Beitrag geschrieben, dass meine Ruderanlenkung kein Spiel haben. Als ich das Zeug dann mal genauer unter die Lupe genommen habe, habe ich festgestellt, dass es sehr wohl Spiel gibt, besonders um die Neutralstellung. Da so etwas, in meinen Augen, gar nicht geht, habe ich entschieden, jedes einzelne Ruder mit einem Servo direkt anzulenken. So wanderten die V-Tail Servos nach aussen an den Rumpf und lenken die Ruder nun direkt an. Auch die Querruderservos habe ich in die Tragflächen verpflanzt. So hat das ganze System nun wirklich absolut null Spiel und der Vogel lässt sich nun anständig trimmen und die FC muss auch nicht immer übermässige Korrekturbewegungen vornehmen.
Esc
Ich habe den standard- esc drin gelassen, der soll 30 Ampère können, was mehr als reichlich ist. Und, mehr als die Motorendrehzahl regeln muss er ja nicht, da ich die anderen Verbraucher über die FC genommen habe (BEC, Kameras usw.).
Gewicht:
Der Vogel wiegt nun 690 Gramm mit einem 3S2200er Lipo. Wobei das Empfängergehäuse und das Klebeband für den Empfänger noch nicht dran sind, da ich noch immer am Experimentieren bezüglich des RSSI- Outputs bin. Da fehlen also noch geschätzte 3-5 Gramm. Dieses Gewicht finde ich absolut ok.
Der Maidenflug steht noch aus. Wie gesagt, ich pröble noch immer am RSSI- OSD rum, irgendwie muss das Problem doch zu lösen sein. Ich möchte unbedingt das RSSI in meinem OSD haben, warte noch auf den Bescheid des Frsky Supports. „Trocken“ funktioniert alles andere nun bestens, mal schauen, wie der Maidenflug ausgeht. Aber ich denke, der Vogel wird fast von selber fliegen, sieht in den Videos auf Youtube unproblematisch aus.
So, habe fertig. Vielleicht habe ich dem einen oder anderen eine Idee mit auf den Weg geben können. Zum Abschluss noch ein paar Fotos:
So, auch wenn ich noch nicht ganz fertig bin, möchte ich nun euch meine Version des Nano Talon vorstellen. Dank dem Forum konnte ich doch das eine oder andere Problem lösen, ohne vorher stundenlang zu rätseln und bin so etwas schneller vorwärts gekommen als geplant. Ich baue und fliege schon über 30 Jahre Modellflugzeuge, das Bauen und einstellen war also überhaupt kein Problem, einzig das Programmieren mit iNav machte mir Kopfzerbrechen. Aber dank vielen Videos auf youtube habe ich auch das gut hinbekommen. Im Moment funktioniert alles bis auf die RSSI Ausgabe im OSD. Das Problem scheint nicht einfach zu lösen sein, habe auch schon in einem anderen Thread darüber berichtet und es konnte mir niemand eine Lösung anbieten (ausser den Wechsel auf OpenTx, was für mich allerdings nicht in Frage kommt, da ich keine Lust habe, 15 Modelle neu zu programmieren). Ich habe dem Support von Frsky geschrieben, wo denn der analoge OSD output auf der Platine des RX8R-pro zu finden sein soll, bislang habe ich allerdings keine Antwort bekommen…..!
So, nun zu meiner Nano- Talon Version:
Empfänger:
Wie bereits erwähnt, habe ich einen Frsky RX8R-pro Empfänger verbaut. Zudem habe ich als Satellitenempfänger einen Frsky XM Empfänger gewählt. Diesem habe ich eine 25cm Antenne eingebaut, somit konnte ich die Reichweite des Empfängers etwas erweitern (habs getestet, macht schon ein bisschen was aus). Die eine Antenne des RX8R habe ich in den Flügel verlegt, die andere geht in Richtung abnehmbarem „Schachtdeckel“. Die Antenne des Satellitenempfängers geht nach vorne in den Rumpf. So habe ich so ziemlich alle Richtungen abgedeckt und sollte ein bestmögliches Signal bekommen.
FC:
Als FC habe ich mich für eine Matek F722 entschieden. Der Preisunterschied zwischen der F405 und der F722 ist doch sehr klein und die 722er Version hat noch das eine oder andere Schmankerl auf Lager.
GPS:
Ich habe ein GPS Modul von Matek mit Kompass verbaut. Die genaue Bezeichnung des GPS Moduls weiss ich jetzt nicht gerade auswendig, war auf jeden Fall teurer als andere Module….. ! Wobei ich gelesen habe, dass es den Kompass gar nicht braucht. Egal, was drin ist, ist drin.
Kamera(s):
Da ich kein Fan von zusätzlichen Kameras bin, welche man irgendwo und irgendwie auf ein Modell pappt, habe ich mich für die Caddx Tarsier 4k Kamera entschieden. Dieses Kamerasystem verfügt im Prinzip über zwei Kameras, eine fürs FPV und die andere um das Bild aufzuzeichnen. Geflogen bin ich damit noch nicht, aber das System gefällt. Auf dem Board ist Standardmässig ein Wifi Sender verbaut, so kann man mit dem Handy kontaktlos Einstellungen an der Kamera vornehmen oder auch Videos und Fotos runterladen.
Die Kamera selber passt nicht in das Loch vorne am Rumpf, deswegen musste der Dremel ran und das Loch musste oval gefräst werden. Dann das Kamerabild kontrolliert, so dass nicht noch Ränder auf dem Bild zu sehen sind und das Ganze dann mit UHU- Por reingeklebt. Da die Platine der Kamera eigentlich für Multicopter gedacht ist, konnte ich diese nirgends richtig festmachen. Also habe ich mich dafür entschieden, die Kamera eine eine Art „Behältnis“ zu packen. D.h., ich habe eine Balsaholzplatte passend zugeschnitten und diese als Grenze zum Akkufach eingeklebt. Die Platte habe ich mit dünnem Schaumstoff gepolstert. So wird die Platine einfach nur reingestellt und kann jederzeit „rausgelupft“ werden um die SD Karte aus dem Slot zu nehmen. Schon während dem Bau habe ich bemerkt, dass die Platine ziemlich warm wird. Also musste eine Kühlung her. So habe ich im Deckel, welcher als Öffnung für den Akkueinbau dient, ein Loch reingefräst, welches genau über der Platine endet. So wird mit dem Fahrtwind Luft auf die Platine gedrückt. Damit die Luft auch wieder abfliessen kann, habe ich bei der Balsaholztrennwand vier Löcher reingebohrt, so ist der Luftaustausch gewährleistet.
Als zweite Kamera habe ich eine alte FPV- Kamera genommen, welche bei mir im Keller rumgelegen war. Ist irgendeine CCD Cam, welche ich vor ein paar Jahren mal auf Banggood oder so gekauft habe. Diese Kamera habe ich in den Schacht eingebaut und gerade nach unten gerichtet. Wenn man nun mit offenem Schacht fliegt, kann man zwischendurch mal gerade runterschauen um zu kucken wo man sich eigentlich genau befindet. Mit der Matek F722 hat man die Möglichkeit zwischen zwei FPV Kameras hin und her zu schalten. Finde ich ein witziges Gimmick.
VTX
Als VTX habe ich einen eachine 805 ( mit der Typenbezeichnung bin ich mir nicht mehr so sicher) verbaut. Der lässt sich bis 800mw hochregeln. Die VTX Antenne ist im Schacht verbaut und schaut nicht aus dem Flugzeug raus. Da der Schaum kaum die Sendeleistung beeinträchtigt, es optisch schöner aussieht und keinen Luftwiderstand bietet, habe ich mich für diese Variante entschieden.
Ruderanlenkungen
Ich habe ja mal in einem Beitrag geschrieben, dass meine Ruderanlenkung kein Spiel haben. Als ich das Zeug dann mal genauer unter die Lupe genommen habe, habe ich festgestellt, dass es sehr wohl Spiel gibt, besonders um die Neutralstellung. Da so etwas, in meinen Augen, gar nicht geht, habe ich entschieden, jedes einzelne Ruder mit einem Servo direkt anzulenken. So wanderten die V-Tail Servos nach aussen an den Rumpf und lenken die Ruder nun direkt an. Auch die Querruderservos habe ich in die Tragflächen verpflanzt. So hat das ganze System nun wirklich absolut null Spiel und der Vogel lässt sich nun anständig trimmen und die FC muss auch nicht immer übermässige Korrekturbewegungen vornehmen.
Esc
Ich habe den standard- esc drin gelassen, der soll 30 Ampère können, was mehr als reichlich ist. Und, mehr als die Motorendrehzahl regeln muss er ja nicht, da ich die anderen Verbraucher über die FC genommen habe (BEC, Kameras usw.).
Gewicht:
Der Vogel wiegt nun 690 Gramm mit einem 3S2200er Lipo. Wobei das Empfängergehäuse und das Klebeband für den Empfänger noch nicht dran sind, da ich noch immer am Experimentieren bezüglich des RSSI- Outputs bin. Da fehlen also noch geschätzte 3-5 Gramm. Dieses Gewicht finde ich absolut ok.
Der Maidenflug steht noch aus. Wie gesagt, ich pröble noch immer am RSSI- OSD rum, irgendwie muss das Problem doch zu lösen sein. Ich möchte unbedingt das RSSI in meinem OSD haben, warte noch auf den Bescheid des Frsky Supports. „Trocken“ funktioniert alles andere nun bestens, mal schauen, wie der Maidenflug ausgeht. Aber ich denke, der Vogel wird fast von selber fliegen, sieht in den Videos auf Youtube unproblematisch aus.
So, habe fertig. Vielleicht habe ich dem einen oder anderen eine Idee mit auf den Weg geben können. Zum Abschluss noch ein paar Fotos:
Anhänge
-
 1,1 MB Aufrufe: 34
1,1 MB Aufrufe: 34 -
 594,1 KB Aufrufe: 35
594,1 KB Aufrufe: 35 -
 1 MB Aufrufe: 40
1 MB Aufrufe: 40 -
 982,5 KB Aufrufe: 39
982,5 KB Aufrufe: 39 -
 680,6 KB Aufrufe: 39
680,6 KB Aufrufe: 39 -
 906,3 KB Aufrufe: 34
906,3 KB Aufrufe: 34 -
 826,8 KB Aufrufe: 34
826,8 KB Aufrufe: 34 -
 763,5 KB Aufrufe: 31
763,5 KB Aufrufe: 31

@ReinhardZ
Nun, umbauen werde ich das Ding nicht auf einen anderen Empfänger. Ich wollte mal das Feature mit dem Satellitenempfänger ausprobieren um das stabilst mögliche Empfangssignal zu haben. Das kann der RX4R nicht. Ich hätte auch nie gedacht, dass es bei einem Frsky Empfänger zum Problem werden kann, ein RSSI Signal aufs OSD zu bringen. Wenn es dann wirklich nicht funktionieren sollte, werde ich halt ohne RSSI im OSD fliegen, mein Sender warnt mich ja, wenns langsam brenzlig werden sollte.
@ruberduck
ZOHD 2204 1870kv mit dem Originalen 6 Zoll Prop.
Nun, umbauen werde ich das Ding nicht auf einen anderen Empfänger. Ich wollte mal das Feature mit dem Satellitenempfänger ausprobieren um das stabilst mögliche Empfangssignal zu haben. Das kann der RX4R nicht. Ich hätte auch nie gedacht, dass es bei einem Frsky Empfänger zum Problem werden kann, ein RSSI Signal aufs OSD zu bringen. Wenn es dann wirklich nicht funktionieren sollte, werde ich halt ohne RSSI im OSD fliegen, mein Sender warnt mich ja, wenns langsam brenzlig werden sollte.
@ruberduck
ZOHD 2204 1870kv mit dem Originalen 6 Zoll Prop.



