
MSS UFO oder Disc-Drone
- Themenstarter Darkmo
- Beginndatum
- Status
- Nicht offen für weitere Antworten.
Hallo Roger.
Jeder lernt dabei hinzu. Und so lange es keine Betriebsgeheimnisse sind verrate ich gerne wie es geht.
Das genialste Hier Im Forum ist wahrscheinlich die BL- Gimbal Geschichte. Hut ab Vor der geballten Kompetenz hier.
Oder Andere Copter mit 12- 16 Motoren usw. Manchmal sind es auch nur Kleinigkeiten in anderen Berichten , die einen selbst inspirieren. Viel Spaß hier bis zu Deinem ersten eigenen Bericht.
ciao Markus
Jeder lernt dabei hinzu. Und so lange es keine Betriebsgeheimnisse sind verrate ich gerne wie es geht.
Das genialste Hier Im Forum ist wahrscheinlich die BL- Gimbal Geschichte. Hut ab Vor der geballten Kompetenz hier.
Oder Andere Copter mit 12- 16 Motoren usw. Manchmal sind es auch nur Kleinigkeiten in anderen Berichten , die einen selbst inspirieren. Viel Spaß hier bis zu Deinem ersten eigenen Bericht.
ciao Markus
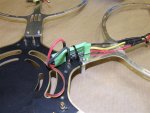
Montage des Prototyp
So langsam kann man sich mal über die Montage und sinnvolle Reihenfolge Gedanken machen .
Beim Prototyp wird die Strom platte des DJI 550 verwendet .Die Serie wir etwas anders aussehen , da Einige Bauteile mit einem weiteren Projek kompatibel sein sollen .
Ich Zeig Euch einfach mal ein paar Bilder








So langsam kann man sich mal über die Montage und sinnvolle Reihenfolge Gedanken machen .
Beim Prototyp wird die Strom platte des DJI 550 verwendet .Die Serie wir etwas anders aussehen , da Einige Bauteile mit einem weiteren Projek kompatibel sein sollen .
Ich Zeig Euch einfach mal ein paar Bilder
Anhänge
-
 76,4 KB Aufrufe: 18
76,4 KB Aufrufe: 18
Sagmal Darkmo, du hast doch nicht die Props auf der 5 oder 6 mm Welle befestigt, oder????
Nehme bitte Propmounts die du fest auf den Motor schrauben kannst.
Ich habe bei meinem Raumschiff ORION auch 3-Blatt mit 10 x 7 direkt auf die Welle geschraubt. Beim Start hat es mir doch glatt die Luftschraube von der Welle gezogen, soviel Schub war da.
Habe mittlerweile die Motoren getauscht und welche mit Propmounts. Jetzt fliegt die Luftschraube nicht mehr weg.
Meine ORION ist ca. 1,4 m Durchmesser, hat ein Quad Triebwerk und ca. 4,5 - 5 kg Gewicht.
Alf-1234 der an eine neue Raumstation DS9 arbeitet
Nehme bitte Propmounts die du fest auf den Motor schrauben kannst.
Ich habe bei meinem Raumschiff ORION auch 3-Blatt mit 10 x 7 direkt auf die Welle geschraubt. Beim Start hat es mir doch glatt die Luftschraube von der Welle gezogen, soviel Schub war da.
Habe mittlerweile die Motoren getauscht und welche mit Propmounts. Jetzt fliegt die Luftschraube nicht mehr weg.
Meine ORION ist ca. 1,4 m Durchmesser, hat ein Quad Triebwerk und ca. 4,5 - 5 kg Gewicht.
Alf-1234 der an eine neue Raumstation DS9 arbeitet
Oh,Oh
So wie du, habe ich damals auch gedacht und einfache Adapter genommen die sich auf der Welle festziehen beim anziehen. Die Physik und vor allem die Schubwerte meiner 3 Blatt Luftschraube haben mich dann gelehrt, was Schub ist. Ich war totall platt.
Meine ORION ist deswegen so schwer geworden, weil ich sehr viel Scale gebaut habe wie z.B. der Landeschacht der ein und ausfährt. Dann die ganze Beleuchtung (ca. 150 LED`s), dann die Lautsprecherelektronik mit Soundmodul wo ich per Funke den Countdown abrufen kann. Ob das sein muss, ist eine andere Frage, sieht aber super aus.
Wie schwer wird dein Ufo?? Und wenn es eben geht, nehme bitte andere Motoren wo man einen Propmount festschrauben kann.
Es wäre doch schade, wenn die schöne Ufozelle durch eine Luftschraube, die sich selbstständig macht, zerstört wird.
Alf-1234
So wie du, habe ich damals auch gedacht und einfache Adapter genommen die sich auf der Welle festziehen beim anziehen. Die Physik und vor allem die Schubwerte meiner 3 Blatt Luftschraube haben mich dann gelehrt, was Schub ist. Ich war totall platt.
Meine ORION ist deswegen so schwer geworden, weil ich sehr viel Scale gebaut habe wie z.B. der Landeschacht der ein und ausfährt. Dann die ganze Beleuchtung (ca. 150 LED`s), dann die Lautsprecherelektronik mit Soundmodul wo ich per Funke den Countdown abrufen kann. Ob das sein muss, ist eine andere Frage, sieht aber super aus.
Wie schwer wird dein Ufo?? Und wenn es eben geht, nehme bitte andere Motoren wo man einen Propmount festschrauben kann.
Es wäre doch schade, wenn die schöne Ufozelle durch eine Luftschraube, die sich selbstständig macht, zerstört wird.
Alf-1234
Es gibt aber einige im Forum die mit Prop Mounts so fliegen. Ist halt immer die Frage wie gut die passen, wie stark die angezogen wurden und wieviel Schub der Propeller später leistet. Gut ausgewuchtete Props dürften auch noch helfen das sich das nicht löst. Ich würde empfehlen nen extra Thread aufzumachen, nachzufragen um mehr Erfahrung zu bekommen. Auf einer einzigen schlechten Erfahrung basierend alles umzustellen find ich nicht gerechtfertigt. So wie ich das sehe ist dem Prop Mount da auch einiges mehr abverlangt worden.
auch bei 1,8kg Schub hat es Bei einem Testmotor mit 5mm welle gehalten .
und ist leider ein Kabelbinder in den Prop gekommen und hat diesen zerstört.
Ich finde die Befestigung mit Spannbonus etwas Vertrauens erweckender als 3 M2,5 er Schrauben an einem Copter-Motor -Prophalter ..
Der Zug auf de Welle ist schon enorm und eine Welle hat sich auch hinten im Außenläufer minimal herausgezogen.
Daher habe ich bei alle Wellen die Madenschrauben dort mit Locktite verschraubt .
was anderes:
Ich habe noch keine Lieferanten für 3 Blatt in 10X 7 gefunden rechte und linke !!
Ich würde gerne weniger Drehzahl am Prop haben
und ist leider ein Kabelbinder in den Prop gekommen und hat diesen zerstört.
Ich finde die Befestigung mit Spannbonus etwas Vertrauens erweckender als 3 M2,5 er Schrauben an einem Copter-Motor -Prophalter ..
Der Zug auf de Welle ist schon enorm und eine Welle hat sich auch hinten im Außenläufer minimal herausgezogen.
Daher habe ich bei alle Wellen die Madenschrauben dort mit Locktite verschraubt .
was anderes:
Ich habe noch keine Lieferanten für 3 Blatt in 10X 7 gefunden rechte und linke !!
Ich würde gerne weniger Drehzahl am Prop haben
Zuletzt bearbeitet:
Wegen den 3-Blatt, guck mal hier:
http://www.der-schweighofer.at/artikel/76494/master-airscrew_3-blatt_10x7_linkslaufend
http://www.der-schweighofer.at/artikel/76494/master-airscrew_3-blatt_10x7_linkslaufend
Hallo, habe mal mit DJI hin und her geschrieben wegen GPS module die Fehler hatten ( ab best kaufdatum )
meines wissens nach ist das GPS in der kleinen runden Einheit untergebracht, das Kompassmodul sitzt aber in der IMU mit den 3 Achs Gyros ..... daher beschreibt dji im Handbuch auch wenn das teil nicht geradeaus fliegt dann stimmt GPS und imu zueinander nicht.
Viele Grüße Tim
meines wissens nach ist das GPS in der kleinen runden Einheit untergebracht, das Kompassmodul sitzt aber in der IMU mit den 3 Achs Gyros ..... daher beschreibt dji im Handbuch auch wenn das teil nicht geradeaus fliegt dann stimmt GPS und imu zueinander nicht.
Viele Grüße Tim
?????? http://www.globe-flight.de/DJI-NAZA-GPS-Quadrokopter-und-Hexakoptersteuerung
Den DJI hatte ich ,als er herausgekommen ist bei Globe-flight gekauft , und bis heute noch nicht benutzt
aber von einer Neuen Version steht nirgends was.
Sollte es wirklich Probleme geben, gehe ich davon aus , dass Käufer darüber auch informiert würden .
Den DJI hatte ich ,als er herausgekommen ist bei Globe-flight gekauft , und bis heute noch nicht benutzt
aber von einer Neuen Version steht nirgends was.
Sollte es wirklich Probleme geben, gehe ich davon aus , dass Käufer darüber auch informiert würden .
Hallo,
zuerst mal, der Kompass sitzt im DJI Wookong und Naza immer bei der GPS Antenne, andere Behauptungen sind falsch.
es gab bei dem Wookong eine neue GPS Antenne, erkennbar an einem etwas anderen Gehäuse
die hatte ein Firmware Fehler, der laut DJI zu Strom Peaks führt, die den Kopter abstürzen lassen.....
von mir genauer analysiert lag es eher an einem Fehler der dazu führte das der CAN Bus zugedrückt wurde und dann
auch die IMU Daten über den CAN Bus nicht mehr gelesen wurden konnte....
Man sollte dazu auf der DJI seite mal nachsehen, ob man so ein betroffenes Modul hat oder nicht
zu deinem Rahmen...
ja schöne Arbeit, aber die Motorträger, da bin ich mir nicht so sicher, ob das das Gelbe vom Ei ist.
Bei der AI-Botix Kiste ist das sehr clever gelöst, stabil und fest, aber dennoch gezielt vom Rahmen entkoppelt
um die Vibrationen von der Sensoreinheit fern zu halten.
Dazu stimmt auch der Abstand zwischen Propeller und Speiche, um keine harten Turbulenzen (wieder Vibration) zu erzeugen
Ich habe selbst so ein Rahmen in Arbeit, allerdings als Okto mit Löchern für bis zu 13" Propeller.
Die Form habe ich mir selbst auf meiner Fräse als Negativ in Ureol Blöcken gefrässt, dass ganze aber geviertelt,
weil erstens die Fräse nicht so groß ist und ich zweitens den Rahmen in vier Segmenten aufbauen wollte......
Das Projekt ruht allerdings seit einiger Zeit, weil sich in verschiedenen Punkten inzwischen zu viele Probleme gehäuft haben.
Zum einen wird das Finale Gewicht nicht mehr wirklich interessant, der Rahmen hat bei über 1,2m größe und den einzelnen
Segmenten einfach zu viel Material bedarf.
Als Zweites bin ich mit den Motorträgern auch noch uneinz.
Die Ansprüche die an so ein Rahmen gestellt werden, wenn man später vielleicht ein zwei verkaufen möchte, gehen ja
von soll nichts wiegen bis soll nichts kosten und schon gar keine paar Tausender.....
Vielleicht könnte man so ein Rahmen selbst mit EPP Granualt um ein CFK Rohr Gerüst schäumen.... das ist eine Sache, die
ich mir mal noch überlegen werden.
Gruß
Christian
zuerst mal, der Kompass sitzt im DJI Wookong und Naza immer bei der GPS Antenne, andere Behauptungen sind falsch.
es gab bei dem Wookong eine neue GPS Antenne, erkennbar an einem etwas anderen Gehäuse
die hatte ein Firmware Fehler, der laut DJI zu Strom Peaks führt, die den Kopter abstürzen lassen.....
von mir genauer analysiert lag es eher an einem Fehler der dazu führte das der CAN Bus zugedrückt wurde und dann
auch die IMU Daten über den CAN Bus nicht mehr gelesen wurden konnte....
Man sollte dazu auf der DJI seite mal nachsehen, ob man so ein betroffenes Modul hat oder nicht
zu deinem Rahmen...
ja schöne Arbeit, aber die Motorträger, da bin ich mir nicht so sicher, ob das das Gelbe vom Ei ist.
Bei der AI-Botix Kiste ist das sehr clever gelöst, stabil und fest, aber dennoch gezielt vom Rahmen entkoppelt
um die Vibrationen von der Sensoreinheit fern zu halten.
Dazu stimmt auch der Abstand zwischen Propeller und Speiche, um keine harten Turbulenzen (wieder Vibration) zu erzeugen
Ich habe selbst so ein Rahmen in Arbeit, allerdings als Okto mit Löchern für bis zu 13" Propeller.
Die Form habe ich mir selbst auf meiner Fräse als Negativ in Ureol Blöcken gefrässt, dass ganze aber geviertelt,
weil erstens die Fräse nicht so groß ist und ich zweitens den Rahmen in vier Segmenten aufbauen wollte......
Das Projekt ruht allerdings seit einiger Zeit, weil sich in verschiedenen Punkten inzwischen zu viele Probleme gehäuft haben.
Zum einen wird das Finale Gewicht nicht mehr wirklich interessant, der Rahmen hat bei über 1,2m größe und den einzelnen
Segmenten einfach zu viel Material bedarf.
Als Zweites bin ich mit den Motorträgern auch noch uneinz.
Die Ansprüche die an so ein Rahmen gestellt werden, wenn man später vielleicht ein zwei verkaufen möchte, gehen ja
von soll nichts wiegen bis soll nichts kosten und schon gar keine paar Tausender.....
Vielleicht könnte man so ein Rahmen selbst mit EPP Granualt um ein CFK Rohr Gerüst schäumen.... das ist eine Sache, die
ich mir mal noch überlegen werden.
Gruß
Christian
Hallo Christian, danke für deine Ausführungen .
Da ich den Nazza und keinen Wookong habe wird mich die Sache nicht betreffen.
Mit den Turbolenzen am Motorträger könntest Du Recht haben.
Sollte da wirklich der Fall sein schwenke ich auf Plan B .
Man sollte immer einen Plan B haben ;-)
Dein Projekt wäre bei mir schon an den Ureol -kosten gescheitert + Fräßen usw ,auch wenn das Modell gevierteilt ist schätze ich sind die ersten 5000-7000 schon weg .Plus Konstruktionskosten .
Hier schon mal ein Bild des Plan B



Da ich den Nazza und keinen Wookong habe wird mich die Sache nicht betreffen.
Mit den Turbolenzen am Motorträger könntest Du Recht haben.
Sollte da wirklich der Fall sein schwenke ich auf Plan B .
Man sollte immer einen Plan B haben ;-)
Dein Projekt wäre bei mir schon an den Ureol -kosten gescheitert + Fräßen usw ,auch wenn das Modell gevierteilt ist schätze ich sind die ersten 5000-7000 schon weg .Plus Konstruktionskosten .
Hier schon mal ein Bild des Plan B
- Status
- Nicht offen für weitere Antworten.

