
Ich würde ja jedem Empfangsmodul einen LM358 spendieren, aber wenn die €0,26 was ausmachen, kann man auch einen nehmen!
Allerdings solltest Du Dir die Beschaltung des LM358 noch mal zu Gemüte führen...
Ich würde außerdem den LM358 direkt am Empfangsmodul verwenden und nicht hinter dem Arduino!
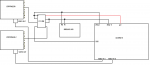
Schaltbild:
Gruß
mueckchen
Allerdings solltest Du Dir die Beschaltung des LM358 noch mal zu Gemüte führen...
Ich würde außerdem den LM358 direkt am Empfangsmodul verwenden und nicht hinter dem Arduino!
Schaltbild:
Gruß
mueckchen
Zuletzt bearbeitet:
")

