
AutoQuad Beginner - Kurze Frage, Kurze Antwort
- Themenstarter droid
- Beginndatum
sooooo Gefrier Session vorbei .
Hier mal die Resultate .
Würde mich freuen wenn jemand mal drüber schaut .
Hier mal die Resultate .
Würde mich freuen wenn jemand mal drüber schaut .
Anhänge
-
 74,1 KB Aufrufe: 31
74,1 KB Aufrufe: 31 -
 73 KB Aufrufe: 29
73 KB Aufrufe: 29 -
 72,8 KB Aufrufe: 27
72,8 KB Aufrufe: 27 -
 73,1 KB Aufrufe: 27
73,1 KB Aufrufe: 27 -
 68 KB Aufrufe: 28
68 KB Aufrufe: 28 -
 68,2 KB Aufrufe: 32
68,2 KB Aufrufe: 32 -
 69,5 KB Aufrufe: 28
69,5 KB Aufrufe: 28 -
 75,8 KB Aufrufe: 30
75,8 KB Aufrufe: 30 -
 77,3 KB Aufrufe: 30
77,3 KB Aufrufe: 30 -
 71,1 KB Aufrufe: 34
71,1 KB Aufrufe: 34 -
 72,8 KB Aufrufe: 26
72,8 KB Aufrufe: 26 -
 110,7 KB Aufrufe: 27
110,7 KB Aufrufe: 27
Habe den Gefriermarathon ja hinter mir , und wollte dann mal ans dynamische gehen .
Heute war aber kein Wetter dazu und so habe ich mal wieder meinen S-Bus Empfänger angeschlossen R6302-SB selbstverständlich mit Inverter. Und siehe da gleiches Problem wie beim ersten Board ich bekomme das einfach nicht mit der Kanalreihenfolge auf die Reihe. Anbei mal ein Screen wie es ist das die Ausgaben stimmen und nebendrann habe ich geschrieben wie es meiner Meinung nach sein müsste. Habe mir bei Fast-Lad mal einen neuen Inverter Skokum bestellt . Hoffe mit dem wird das anders.
Heute war aber kein Wetter dazu und so habe ich mal wieder meinen S-Bus Empfänger angeschlossen R6302-SB selbstverständlich mit Inverter. Und siehe da gleiches Problem wie beim ersten Board ich bekomme das einfach nicht mit der Kanalreihenfolge auf die Reihe. Anbei mal ein Screen wie es ist das die Ausgaben stimmen und nebendrann habe ich geschrieben wie es meiner Meinung nach sein müsste. Habe mir bei Fast-Lad mal einen neuen Inverter Skokum bestellt . Hoffe mit dem wird das anders.
Anhänge
-
 105,8 KB Aufrufe: 21
105,8 KB Aufrufe: 21
Hallo,
ich versuche gerade meinen AQ-Copter in die Luft zu bekommen. Ich habe gefrohren, getanzt und geschwitzt (zumindest mein PC). Das hat jetzt auch endlich, so wie es scheint, gut geklappt. Bis zu diesem Punkt habe ich mich schon eifrig durch die Foren gewühlt, komme jetzt aber nicht so richtig weiter, da ich nicht genau weiß wonach ich suchen soll.
Mein Quadrocopter lässt sich starten und auch schweben (An der Hand!). ABER: wenn ich über einen bestimmten Neigungspunkt komme (Nich, Roll) bleibt der Copter in diesem Winkel stehen und kommt nicht mehr zurück. Im Flug wäre das der sichere Absturz. Auch das Gearen will nicht so richtig. Es ist sehr träge.
Ich habe mich noch nicht an die PID Werte gewagt, da es in vielen Beitragen div. Foren heisst der AQ würde in Defaulteinstellungen bereits ganz o.k. fliegen, wenn man die Motormix-Einstellungen anpasst.
Entgegen der Vorgane von immer 100% habe ich gelesen man solle bei einem Quad X die Werte auf 50% anpassen.
Mot. Throt. Pitch Roll Yaw
A 100 50 50 -50
B 100 50 -50 50
C 100 -50 -50 -50
D 100 -50 50 50
Ist das bekannt und gibt es irgendwo einen Forenbeitrag zu diesem Thema?
Gruß
Florian
ich versuche gerade meinen AQ-Copter in die Luft zu bekommen. Ich habe gefrohren, getanzt und geschwitzt (zumindest mein PC). Das hat jetzt auch endlich, so wie es scheint, gut geklappt. Bis zu diesem Punkt habe ich mich schon eifrig durch die Foren gewühlt, komme jetzt aber nicht so richtig weiter, da ich nicht genau weiß wonach ich suchen soll.
Mein Quadrocopter lässt sich starten und auch schweben (An der Hand!). ABER: wenn ich über einen bestimmten Neigungspunkt komme (Nich, Roll) bleibt der Copter in diesem Winkel stehen und kommt nicht mehr zurück. Im Flug wäre das der sichere Absturz. Auch das Gearen will nicht so richtig. Es ist sehr träge.
Ich habe mich noch nicht an die PID Werte gewagt, da es in vielen Beitragen div. Foren heisst der AQ würde in Defaulteinstellungen bereits ganz o.k. fliegen, wenn man die Motormix-Einstellungen anpasst.
Entgegen der Vorgane von immer 100% habe ich gelesen man solle bei einem Quad X die Werte auf 50% anpassen.
Mot. Throt. Pitch Roll Yaw
A 100 50 50 -50
B 100 50 -50 50
C 100 -50 -50 -50
D 100 -50 50 50
Ist das bekannt und gibt es irgendwo einen Forenbeitrag zu diesem Thema?
Gruß
Florian
Hallo Florian,
das es Sinn mach den Motormix zu ändern wurde hier schon besprochen. Ich habe damals auch einen Quad mit Autoquad ausgestattet.
- Standard QUAD Motormix
- Standard PID`s
Ich musste nur die Altitude PID`s anpassen, danach flog er viel besser als jede Naza ;-)
Hast du mal auf die MAE Werte nach den Berechnungen geachtet (< 0.09) ?
Hast du die #define`s wirklich per Transmit übertragen ? (das habe ich versehendlich mal vergessen)
Hast du genügend Gas gegeben (nahe der Schwebegrenze) ?
Das er über einen bestimmten Winkel hinaus nicht mehr ausgleicht klingt eigenartig. YAW im Handtest ist allerdings kaum prüfbar bei Autoquad. Nur die Drehrichtung sollte sich hier prüfen lassen.
Viele Grüße
Henry
das es Sinn mach den Motormix zu ändern wurde hier schon besprochen. Ich habe damals auch einen Quad mit Autoquad ausgestattet.
- Standard QUAD Motormix
- Standard PID`s
Ich musste nur die Altitude PID`s anpassen, danach flog er viel besser als jede Naza ;-)
Hast du mal auf die MAE Werte nach den Berechnungen geachtet (< 0.09) ?
Hast du die #define`s wirklich per Transmit übertragen ? (das habe ich versehendlich mal vergessen)
Hast du genügend Gas gegeben (nahe der Schwebegrenze) ?
Das er über einen bestimmten Winkel hinaus nicht mehr ausgleicht klingt eigenartig. YAW im Handtest ist allerdings kaum prüfbar bei Autoquad. Nur die Drehrichtung sollte sich hier prüfen lassen.
Viele Grüße
Henry
Zuletzt bearbeitet:
Hallo Henry,
Hallo Sandmen,
danke erst mal für Eure Antworten.
die MAE Werte sind:
// Step 1
// MAE 0 = 0.000227
// MAE 1 = 0.000146
// MAE 2 = 0.000151
// Step 2
// MAE: 0.0325534
// Step 3
// MAE: 0.0178434
// Step 4a
// 0.028729 0.008555 0.037394 0.000000 0.000000 = 0.074679
// Step 4b
// 0.028606 0.008532 0.036883 0.000000 0.000000 = 0.074022
// Step 5
// 0.028610 0.008534 0.036885 0.000000 0.000000 = 0.074029
//Step 6
// 0.028602 0.000000 0.036872 0.001314 0.002496 = 0.069284
Übertragen habe ich sie auch. Ich kann die "#define" Werte unter den IMU-Parameters wieder finden.
Gas habe ich bis zum schweben gegeben.
Warum ist YAW nicht prüfbar? Die Richtung stimmt, nur dreht sich der Kopter fast nicht und kommt auch nicht wirklich zurück.
Firmware ist die aqv6.6.1-rev2.hex
Parameterfile: - entfernt
Logfile: - entfernt
Ich bin ca. 0,5 m geschwebt. Er lässt sich recht schwammig steuern. Wenn man den Kopter händisch zu stark neigt oder per Fernsteuerung kippt kommt er nicht wieder zurück. Ich hoffe man kann das aus dem Logfile erkennen.
Gruß
Florian
Hallo Sandmen,
danke erst mal für Eure Antworten.
die MAE Werte sind:
// Step 1
// MAE 0 = 0.000227
// MAE 1 = 0.000146
// MAE 2 = 0.000151
// Step 2
// MAE: 0.0325534
// Step 3
// MAE: 0.0178434
// Step 4a
// 0.028729 0.008555 0.037394 0.000000 0.000000 = 0.074679
// Step 4b
// 0.028606 0.008532 0.036883 0.000000 0.000000 = 0.074022
// Step 5
// 0.028610 0.008534 0.036885 0.000000 0.000000 = 0.074029
//Step 6
// 0.028602 0.000000 0.036872 0.001314 0.002496 = 0.069284
Übertragen habe ich sie auch. Ich kann die "#define" Werte unter den IMU-Parameters wieder finden.
Gas habe ich bis zum schweben gegeben.
Warum ist YAW nicht prüfbar? Die Richtung stimmt, nur dreht sich der Kopter fast nicht und kommt auch nicht wirklich zurück.
Firmware ist die aqv6.6.1-rev2.hex
Parameterfile: - entfernt
Logfile: - entfernt
Ich bin ca. 0,5 m geschwebt. Er lässt sich recht schwammig steuern. Wenn man den Kopter händisch zu stark neigt oder per Fernsteuerung kippt kommt er nicht wieder zurück. Ich hoffe man kann das aus dem Logfile erkennen.
Gruß
Florian
Zuletzt bearbeitet:
Hallo Florian,
ich denke das muss sich mal jemand anschauen, der schon länger mit der AQ unterwegs ist.
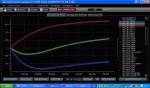
Auf den ersten Blick sehe ich saubere Linien was die Fernsteuerung betrifft und das Schwebegas ist auch bei 700.
Aber - ich meine das der Copter ständig in das voreingestellte Maximum von 300 auf Pitch und Roll hineinläuft und somit nicht stark genug ausgleichen kann. Man kann in einem solchen Fall ctr_max = 300 hochsetzen. Da du aber im Mischer beides reduziert hast, dürfte hier die Ursache zu suchen sein.
Ich denke du solltest mit einem Standard Mischer beginnen und im Anschluss noch einmal die Logfiles sichten/lassen solltest.
Schau mal hier:
http://autoquad.org/wp-content/plugins/download-monitor/download.php?id=54
Was Yaw angeht vermute ich Laienhaft das hier das vorrangig Nick und Roll abgearbeitet werden und für Yaw gar keine Reserve mehr bleibt.
Ich hoffe es hilft ;-)
Viele Grüße
Henry
ich denke das muss sich mal jemand anschauen, der schon länger mit der AQ unterwegs ist.
Auf den ersten Blick sehe ich saubere Linien was die Fernsteuerung betrifft und das Schwebegas ist auch bei 700.
Aber - ich meine das der Copter ständig in das voreingestellte Maximum von 300 auf Pitch und Roll hineinläuft und somit nicht stark genug ausgleichen kann. Man kann in einem solchen Fall ctr_max = 300 hochsetzen. Da du aber im Mischer beides reduziert hast, dürfte hier die Ursache zu suchen sein.
Ich denke du solltest mit einem Standard Mischer beginnen und im Anschluss noch einmal die Logfiles sichten/lassen solltest.
Schau mal hier:
http://autoquad.org/wp-content/plugins/download-monitor/download.php?id=54
Was Yaw angeht vermute ich Laienhaft das hier das vorrangig Nick und Roll abgearbeitet werden und für Yaw gar keine Reserve mehr bleibt.
Ich hoffe es hilft ;-)
Viele Grüße
Henry
Zuletzt bearbeitet:
Hallo Henry,
Hallo Sandmen,
danke erst mal für Eure Antworten.
die MAE Werte sind:
// Step 1
// MAE 0 = 0.000227
Hallo Sandmen,
danke erst mal für Eure Antworten.
die MAE Werte sind:
// Step 1
// MAE 0 = 0.000227
Erstmal der Mix, Trottle 100, Roll und Nick 50 sind in Ordnung wenn der Frame dazu passt und man mit den PID´s nicht all zu viel von den Defaults abweichen möchte. Kommt halt auf die Physik des ganzen Kopters an. Aber Yaw muß auf 100 bleiben, da hast dich woauchimmer verlesen. Das erklärt auch deine Yaw Probleme.
Logs usw. seh ich mir gerne durch, mach nur bitte ein paar Fotos von dem Teil und noch ein paar Daten zu Gewicht, Antrieb, Luftschraube Maße usw.
Gruß MäX
Hallo Max,
Hallo Henry,
danke für Eure Antworten. Die Mixertabelle habe ich gestern abend noch angepasst und siehe da, das Yaw-Problem ist weg! Allerdings zieht der Kopter beim Gieren noch etwas nach wenn man den Stick wieder in Mittelstellung zurückstellt. Hast Du eine Idee ob das am PID Regler (Yaw Angle PID) liegt? Wenn ja, um welche Größenordnungen sollte ich ihn anpassen?
BTW: Warum sind bei den Reglerbegrenzungen teilweise kleiner als die einzelnen Parameter? z.B. ist bei "Yaw Rate PID" P Max = 80. der P Wert liegt aber schon bei 300? Oder "Tilt Rate PID" ist der D Wert 7180 und der DMax ist bei 999?
Foto bekomme ich z.Z. nicht hin. Aber eine gute Beschreibung:
Frameaufbau: X (Karbonrohr)
AQ Platine oberhalb des Kreuzrahmens und Akku unterhalb montiert.
Motorabstand: (Bild nach AQ-Mixertabelle) A-C = 72cm (diagonal), A-B = 51cm
Luftschrauben: Graupner E Prop 10"x5"
Motoren: Axi 2217/20
Gewicht: ca. 1,8 kg
Wäre cool wenn Du eine Idee dazu hast.
Gruß
Florian
Hallo Henry,
danke für Eure Antworten. Die Mixertabelle habe ich gestern abend noch angepasst und siehe da, das Yaw-Problem ist weg! Allerdings zieht der Kopter beim Gieren noch etwas nach wenn man den Stick wieder in Mittelstellung zurückstellt. Hast Du eine Idee ob das am PID Regler (Yaw Angle PID) liegt? Wenn ja, um welche Größenordnungen sollte ich ihn anpassen?
BTW: Warum sind bei den Reglerbegrenzungen teilweise kleiner als die einzelnen Parameter? z.B. ist bei "Yaw Rate PID" P Max = 80. der P Wert liegt aber schon bei 300? Oder "Tilt Rate PID" ist der D Wert 7180 und der DMax ist bei 999?
Foto bekomme ich z.Z. nicht hin. Aber eine gute Beschreibung:
Frameaufbau: X (Karbonrohr)
AQ Platine oberhalb des Kreuzrahmens und Akku unterhalb montiert.
Motorabstand: (Bild nach AQ-Mixertabelle) A-C = 72cm (diagonal), A-B = 51cm
Luftschrauben: Graupner E Prop 10"x5"
Motoren: Axi 2217/20
Gewicht: ca. 1,8 kg
Wäre cool wenn Du eine Idee dazu hast.
Gruß
Florian
Zuletzt bearbeitet:
Hallo Leute ,
habe es auch schon im englischen AQ Forum gepostet mein "Problem" eine Erklärung fehlt mir leider noch.
Also wenn es den einem von den Profis nichts ausmacht einmal bitte für mich klar und Verständlich .
Ich habe nach wie vor Futaba . Belegung
1 Roll
2 Pitch / Nick
3 Throttle
4 Yaw
Standartmäßig steht in der GCS ja
1 Throttle
2 Roll
3 Pitch
4 Yaw
lasse ich nun alles stehen wie die GCS es vorgibt stimmen die "Stickmoves"
Stelle ich es nach Futaba um ist alles Verdreht und egal wie ,ob mit Speichern ---> Disconnecten ----> GCS schliessen ----> und wieder in umgekehrter Reihenfolge kontrollieren , ich es sehen will der Futaba Sender bringt nun mal auf 3 sein Gas und nicht auf 1 wie es mir die GCS anzeigt.
Ist da ein Fehler im Code ? Oder hier in Hemsbach hinter der Tastatur ?
Ich traue mich einfach nicht hier weiterzumachen ohne eine fundierte Auskunft.
Irgendwie muss sich das doch erklären lassen oder ? Oder ich bin wirklich zu doof .
habe es auch schon im englischen AQ Forum gepostet mein "Problem" eine Erklärung fehlt mir leider noch.
Also wenn es den einem von den Profis nichts ausmacht einmal bitte für mich klar und Verständlich .
Ich habe nach wie vor Futaba . Belegung
1 Roll
2 Pitch / Nick
3 Throttle
4 Yaw
Standartmäßig steht in der GCS ja
1 Throttle
2 Roll
3 Pitch
4 Yaw
lasse ich nun alles stehen wie die GCS es vorgibt stimmen die "Stickmoves"
Stelle ich es nach Futaba um ist alles Verdreht und egal wie ,ob mit Speichern ---> Disconnecten ----> GCS schliessen ----> und wieder in umgekehrter Reihenfolge kontrollieren , ich es sehen will der Futaba Sender bringt nun mal auf 3 sein Gas und nicht auf 1 wie es mir die GCS anzeigt.
Ist da ein Fehler im Code ? Oder hier in Hemsbach hinter der Tastatur ?
Ich traue mich einfach nicht hier weiterzumachen ohne eine fundierte Auskunft.
Irgendwie muss sich das doch erklären lassen oder ? Oder ich bin wirklich zu doof .
Hallo Max,
Hallo Henry,
danke für Eure Antworten. Die Mixertabelle habe ich gestern abend noch angepasst und siehe da, das Yaw-Problem ist weg! Allerdings zieht der Kopter beim Gieren noch etwas nach wenn man den Stick wieder in Mittelstellung zurückstellt. Hast Du eine Idee ob das am PID Regler (Yaw Angle PID) liegt? Wenn ja, um welche Größenordnungen sollte ich ihn anpassen?
Hallo Henry,
danke für Eure Antworten. Die Mixertabelle habe ich gestern abend noch angepasst und siehe da, das Yaw-Problem ist weg! Allerdings zieht der Kopter beim Gieren noch etwas nach wenn man den Stick wieder in Mittelstellung zurückstellt. Hast Du eine Idee ob das am PID Regler (Yaw Angle PID) liegt? Wenn ja, um welche Größenordnungen sollte ich ihn anpassen?
Wenn deine Maschine physikalisch dazu in der Lage ist schnell und knackig zu drehen (was ja nicht zwangsläufig der Fall sein muß) kannst du Yaw angle I und D etwas höher drehen, dann sollte er schneller reagieren.
BTW: Warum sind bei den Reglerbegrenzungen teilweise kleiner als die einzelnen Parameter? z.B. ist bei "Yaw Rate PID" P Max = 80. der P Wert liegt aber schon bei 300? Oder "Tilt Rate PID" ist der D Wert 7180 und der DMax ist bei 999?
Steht aber genau in der WiKi zum nachlesen: http://autoquad.org/wiki/wiki/flying/tuning-and-troubleshooting/pid-tuning-theory/
Foto bekomme ich z.Z. nicht hin. Aber eine gute Beschreibung:
Frameaufbau: X (Karbonrohr)
AQ Platine oberhalb des Kreuzrahmens und Akku unterhalb montiert.
Motorabstand: (Bild nach AQ-Mixertabelle) A-C = 72cm (diagonal), A-B = 51cm
Luftschrauben: Graupner E Prop 10"x5"
Motoren: Axi 2217/20
Gewicht: ca. 1,8 kg
Wäre cool wenn Du eine Idee dazu hast.
Gruß
Florian
Frameaufbau: X (Karbonrohr)
AQ Platine oberhalb des Kreuzrahmens und Akku unterhalb montiert.
Motorabstand: (Bild nach AQ-Mixertabelle) A-C = 72cm (diagonal), A-B = 51cm
Luftschrauben: Graupner E Prop 10"x5"
Motoren: Axi 2217/20
Gewicht: ca. 1,8 kg
Wäre cool wenn Du eine Idee dazu hast.
Gruß
Florian
Ein Video das dein Problem zeigt wäre zusätzlich noch sehr hilfreich, Ferndiagnosen sind so eine Sache
")
Hallo teramax,
danke für Deine Antwort und auch PN.
Ich war gestern Nachmittag so mutig und bin einfach mal draussen geflogen. Ich muss schon sagen WOW! WOW! WOW!
Zunächst habe ich ganz vorsichtig im man. Mode getestet und habe dann das Tempo erhöht. Er hat sich super toll geflogen. Ich glaube das Problem war, das ich bei den Handtests nicht den tatsächlichen Flug nachstellen kann. Ich habe in der Hand die PIDs soweit angepasst das der Kopter immer stabil in seine Ursprungslage zurück kommt und ich ein gutes Bauchgefühl bekommen hatte.
Die Pos. Hold Funktion ist ja unglaublich! Es war ein bischen windig aber er ist phantastisch auf der Stelle geblieben. Lediglich die bei der Höhe ist er mir entweder ganz langsam nach oben oder unten gedriftet.
Beim abrupt Abfangen aus der Höchstgeschwindigkeit klingen die Motoren etwas seltsam. Ev. kommen da die Regler nicht nach.
Ansonsten fliegt er jetzt aber wunderbar!
Gruß
Florian
danke für Deine Antwort und auch PN.
Ich war gestern Nachmittag so mutig und bin einfach mal draussen geflogen. Ich muss schon sagen WOW! WOW! WOW!
Zunächst habe ich ganz vorsichtig im man. Mode getestet und habe dann das Tempo erhöht. Er hat sich super toll geflogen. Ich glaube das Problem war, das ich bei den Handtests nicht den tatsächlichen Flug nachstellen kann. Ich habe in der Hand die PIDs soweit angepasst das der Kopter immer stabil in seine Ursprungslage zurück kommt und ich ein gutes Bauchgefühl bekommen hatte.
Die Pos. Hold Funktion ist ja unglaublich! Es war ein bischen windig aber er ist phantastisch auf der Stelle geblieben. Lediglich die bei der Höhe ist er mir entweder ganz langsam nach oben oder unten gedriftet.
Beim abrupt Abfangen aus der Höchstgeschwindigkeit klingen die Motoren etwas seltsam. Ev. kommen da die Regler nicht nach.
Ansonsten fliegt er jetzt aber wunderbar!
Gruß
Florian
Zuletzt bearbeitet:
Glückwunsch zum neuen Lieblingsspielzeug.
Poste doch mal einen Screenshot oder Deine PID Werte. Hast Du am ALT_Hold schon geschraubt?
Poste doch mal einen Screenshot oder Deine PID Werte. Hast Du am ALT_Hold schon geschraubt?
danke für die Glückwünsche. Ein sehr sehr geiles Lieblingsspielzeug!
Ich bin überigens der lebende Beweis dafür das man ein AQ auch ohne große Vorerfahrung in die Luft bekommt
. Also nicht entmutigen lassen. Es lohnt sich!!!Ich bin schon ganz gespannt auf die Mission-Flight-Funktionen. Ich hoffe das Wetter ist am WE gut.
Am "ALT_Hold" habe ich noch nichts gemacht.
Hier die Parameterdatei wegen der PID Parameter:
http://kopter2013.hostingsiteforfree.com/PARAMS_25102013.txt
Gruß
Florian
Sodele, kurzes Update zu meinem fast Nervenzusammenbruch ;-)
Peter (sandmen) hat mir heute schlüssig erklären können woran das mit meinen Kanälen liegt.
Jetzt kann ich das nächste Wochenende mal gepflegt ein Tänzchen mit meiner süßen machen.
Danke erstmal Peter und alle die zur Lösung beitragen wollten
Peter (sandmen) hat mir heute schlüssig erklären können woran das mit meinen Kanälen liegt.
Jetzt kann ich das nächste Wochenende mal gepflegt ein Tänzchen mit meiner süßen machen.
Danke erstmal Peter und alle die zur Lösung beitragen wollten

