
AutoQuad Beginner - Kurze Frage, Kurze Antwort
- Themenstarter droid
- Beginndatum
@kinderkram
Mal sehen ob ich irgendwann mal vorbei komme. Wie sieht es bei euch in den Wintermonaten aus. Hält euch da nichts auf?
Gruß, hexakopter
Mal sehen ob ich irgendwann mal vorbei komme. Wie sieht es bei euch in den Wintermonaten aus. Hält euch da nichts auf?
Gruß, hexakopter

Hiermal ein Flug mit nem wackeligen DJI durch die Halle und übers Gelände - soweit das Auge reicht.
http://www.youtube.com/watch?v=SOsJEeVCl4M
Werd demnächst mal ein Video vom letzten Wochenende hochladen. War verdammt böig - aber der AQ stand wie angenagelt.
Wir haben Zooms & Schwenks geübt und kräftig das Gimbal geschüttelt, das sieht teilweise aus wie vom Stativ gedreht.
Danke für die Info!
Der Link geht leider nicht... bin angeblich nicht Autoresiert für den beitrag. Regestriert bin ich schon, gleicher Name wie hier.
Vg
Florian
Der Link geht leider nicht... bin angeblich nicht Autoresiert für den beitrag. Regestriert bin ich schon, gleicher Name wie hier.
Vg
Florian
Zu M-Link gips tatsächlich nich viel. Es funzt.
Is seit Sommer in der FW und der GUI. http://forum.autoquad.org/viewtopic.php?f=12&t=2513
Telemetrie läuft über MAVLink - solange keine Bedarf da is, wird wohl auch keiner was basteln für die JRs.
Für Graupner HOTT hat Menno ja eine Lösung aber die sind halt auch weiter verbreitet als die Multiplex...
Aber für ne bessere Telemetrie/OSD empfiehlt sich eh ne Groundstation, mindestens ne Android Ratsche und nem 10Euro Bluetooth Adapter.
Is seit Sommer in der FW und der GUI. http://forum.autoquad.org/viewtopic.php?f=12&t=2513
Telemetrie läuft über MAVLink - solange keine Bedarf da is, wird wohl auch keiner was basteln für die JRs.
Für Graupner HOTT hat Menno ja eine Lösung aber die sind halt auch weiter verbreitet als die Multiplex...
Aber für ne bessere Telemetrie/OSD empfiehlt sich eh ne Groundstation, mindestens ne Android Ratsche und nem 10Euro Bluetooth Adapter.
AutoQuad und M-Link
Gerade fertig geworden!
Nach ersten absolvierten Trimmflügen (Nahbereich, indoor) - mein "M-Link-Copter".
Rahmen: rOsewhite Rubina mod. (längere Arme, ca. 620 mm Spannweite).
microcopters.de / pitchpump.de / carbon-team.de (CFK Rohr).
Bill Nesbitts AutoQuad AQ6 flight controller- autoquad.org
viacopter.eu, flyduino.net, emcotec.de
FW: Version 6.7-RC1 release candidate (b1400)
http://autoquad.org/software-downloads/?category=3
GUIs: AQ Ground Control Station for Windows - Version 1.3 RC 2.1
http://autoquad.org/software-downloads/?category=2
sowie (optional) AutoQuad Android Ground Control Station Version 2.8.5
http://forum.autoquad.org/viewtopic.php?f=32&t=1390&start=100
(Attachment von sandmen im 6. Beitrag: Aq-gcs2_2.8.5.zip)
oder AutoQuad Android Ground Control Station Version. 2.5.2
http://autoquad.org/software-downloads/?did=40 (Aq-gcs2_2.5.2.zip)
auf Nexus 7.
AutoQuad ESC32 electronic speed controller - autoquad.org
viacopter.eu, flyduino.net, emcotec.de.
FW: ESC32 Compiled Firmware - Version 1.4.1 Build 5251
http://autoquad.org/software-downloads/?category=4
T-Motor MN3110-15 780KV
T-Motor Prop 11x3,7
3s SLS APL Akkus 2 x 4000mAh parallel
3A Hobbywing UBEC (optional)
Gewicht: 2154g Abflug (0,25g weniger ohne Micro SD-Karte )
Sender: Multiplex Royal evo9 FW Version 3.46.
Alle M-Link Sender mit mindestens zwei 3 Pos. Schalter dürften tauglich sein.
Ggf. FW Update mittels Multiplex-Launcher (multiplex-rc.de/service/downloads/software
(USB-Treiber nicht vergessen!)) und PC-Kabel # 8 514 >8< durchführen. Minimal-Anzahl Kanäle: 6.
Empfänger: RX-9-DR M-LINK 2,4 GHz FW Version 1.26.
Alle M-Link Empfänger, die NICHT 'Light' im Namen tragen, dürften das benötigte
SRXL ausgeben können. Ggf. FW Update mittels Multiplex-Launcher nebst USB-Treiber
und PC-Kabel # 8 514 >9< durchführen. Minimal-Anzahl Kanäle: 6.
1 Throttel (Gas, Pitch - vertikale Kontrolle)
2 Roll (Quer - Kontrolle um die Längsachse)
3 Pitch (Höhe, Nick - Kontrolle um die Querachse)
4 Yaw (Seite, Gier - Kontrolle um die Hochachse)
5 Cam Trigger (Der Auslösser - das Knöpfchen zum Knipsen)
6 Flight Mode ((3 Pos. Schalter) manual mode oder alt./pos. hold oder mission mode und armen/disarmen)
7 Home Action ((3 Pos. Schalter) activate RTH oder normal flight oder set home pos. und armen/disarmen)
8 Gimbal Tilt (Kontrolle des vertikalen Kameraneigungswinkels)
9 Heading Free (weiß ich noch nicht)
10 Passthrough 1 (weiß ich noch nicht)
Der Channels Monitor der QGroundControl (GUI) zeigt mir Platz für 16 Kanäle
Bevor unser Empfänger nun seine Arbeit am AutoQuad verrichten kann ist Buchse B/D,
mit Hilfe des Multiplex-Launchers (USB-Treiber?) und dem PC-Kabel # 8 514 9
vom 'Multiplex Zwei-Empfänger-Betrieb' (Werkseinstellung) auf 'Serielle
Servodaten SRXL' umzustellen.
Der (gebundene ) Empfänger ist über Buchse B/D mit einem sogenannten
'Spektrum Telemetrie Datenkabel' oder 'Spektrum Telemetriekabel' z.B.
http://www.mhm-modellbau.de/part-SPMA9550.php
oder
http://www.ebay.de/itm/SPMA9550-Spektrum-60mm-Telemetrie-Kabelverlangerung-
Neu-OVP-/271320006083?pt=RC_Modellbau&hash=item3f2beebdc3
siehe auch
http://autoquad.org/software-downloads/?did=22
(AQ6 Headers & Connectors, Seite 3, J7-Pin)
mit dem Anschluß für serielle Datenströme an der FC verbunden.
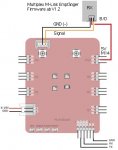
An J7-1 liegen - für Spektrum gebräuchlich - 3,3 Volt an. Unser Multipex Empfänger benötigt
aber um die 5 Volt. Bei 3,3 Volt gibt's Mecker vom Sender (Unterspannung). Also ist das Pluskabel
Abzusetzen, um die 5 Volt für den Empfänger anderswo abzugreifen (s. Bild 1: Anschlußschema).
Bleibt noch den M-Link Empfänger über die GUI an der FC anzumelden (Auswahl bei 'Radio Type')
und frech in die Runde zu fragen:
ach, kann man auch mit anderen Funken, als die von Multiplex, AutoQuad pilotieren ?
Gerade fertig geworden!
Nach ersten absolvierten Trimmflügen (Nahbereich, indoor) - mein "M-Link-Copter".
Rahmen: rOsewhite Rubina mod. (längere Arme, ca. 620 mm Spannweite).
microcopters.de / pitchpump.de / carbon-team.de (CFK Rohr).
Bill Nesbitts AutoQuad AQ6 flight controller- autoquad.org
viacopter.eu, flyduino.net, emcotec.de
FW: Version 6.7-RC1 release candidate (b1400)
http://autoquad.org/software-downloads/?category=3
GUIs: AQ Ground Control Station for Windows - Version 1.3 RC 2.1
http://autoquad.org/software-downloads/?category=2
sowie (optional) AutoQuad Android Ground Control Station Version 2.8.5
http://forum.autoquad.org/viewtopic.php?f=32&t=1390&start=100
(Attachment von sandmen im 6. Beitrag: Aq-gcs2_2.8.5.zip)
oder AutoQuad Android Ground Control Station Version. 2.5.2
http://autoquad.org/software-downloads/?did=40 (Aq-gcs2_2.5.2.zip)
auf Nexus 7.
AutoQuad ESC32 electronic speed controller - autoquad.org
viacopter.eu, flyduino.net, emcotec.de.
FW: ESC32 Compiled Firmware - Version 1.4.1 Build 5251
http://autoquad.org/software-downloads/?category=4
T-Motor MN3110-15 780KV
T-Motor Prop 11x3,7
3s SLS APL Akkus 2 x 4000mAh parallel
3A Hobbywing UBEC (optional)
Gewicht: 2154g Abflug (0,25g weniger ohne Micro SD-Karte
)Sender: Multiplex Royal evo9 FW Version 3.46.
Alle M-Link Sender mit mindestens zwei 3 Pos. Schalter dürften tauglich sein.
Ggf. FW Update mittels Multiplex-Launcher (multiplex-rc.de/service/downloads/software
(USB-Treiber nicht vergessen!)) und PC-Kabel # 8 514 >8< durchführen. Minimal-Anzahl Kanäle: 6.
Empfänger: RX-9-DR M-LINK 2,4 GHz FW Version 1.26.
Alle M-Link Empfänger, die NICHT 'Light' im Namen tragen, dürften das benötigte
SRXL ausgeben können. Ggf. FW Update mittels Multiplex-Launcher nebst USB-Treiber
und PC-Kabel # 8 514 >9< durchführen. Minimal-Anzahl Kanäle: 6.
1 Throttel (Gas, Pitch - vertikale Kontrolle)
2 Roll (Quer - Kontrolle um die Längsachse)
3 Pitch (Höhe, Nick - Kontrolle um die Querachse)
4 Yaw (Seite, Gier - Kontrolle um die Hochachse)
5 Cam Trigger (Der Auslösser - das Knöpfchen zum Knipsen)
6 Flight Mode ((3 Pos. Schalter) manual mode oder alt./pos. hold oder mission mode und armen/disarmen)
7 Home Action ((3 Pos. Schalter) activate RTH oder normal flight oder set home pos. und armen/disarmen)
8 Gimbal Tilt (Kontrolle des vertikalen Kameraneigungswinkels)
9 Heading Free (weiß ich noch nicht)
10 Passthrough 1 (weiß ich noch nicht)
Der Channels Monitor der QGroundControl (GUI) zeigt mir Platz für 16 Kanäle
Bevor unser Empfänger nun seine Arbeit am AutoQuad verrichten kann ist Buchse B/D,
mit Hilfe des Multiplex-Launchers (USB-Treiber?) und dem PC-Kabel # 8 514 9
vom 'Multiplex Zwei-Empfänger-Betrieb' (Werkseinstellung) auf 'Serielle
Servodaten SRXL' umzustellen.
Der (gebundene
) Empfänger ist über Buchse B/D mit einem sogenannten'Spektrum Telemetrie Datenkabel' oder 'Spektrum Telemetriekabel' z.B.
http://www.mhm-modellbau.de/part-SPMA9550.php
oder
http://www.ebay.de/itm/SPMA9550-Spektrum-60mm-Telemetrie-Kabelverlangerung-
Neu-OVP-/271320006083?pt=RC_Modellbau&hash=item3f2beebdc3
siehe auch
http://autoquad.org/software-downloads/?did=22
(AQ6 Headers & Connectors, Seite 3, J7-Pin)
mit dem Anschluß für serielle Datenströme an der FC verbunden.
An J7-1 liegen - für Spektrum gebräuchlich - 3,3 Volt an. Unser Multipex Empfänger benötigt
aber um die 5 Volt. Bei 3,3 Volt gibt's Mecker vom Sender (Unterspannung). Also ist das Pluskabel
Abzusetzen, um die 5 Volt für den Empfänger anderswo abzugreifen (s. Bild 1: Anschlußschema).
Bleibt noch den M-Link Empfänger über die GUI an der FC anzumelden (Auswahl bei 'Radio Type')
und frech in die Runde zu fragen:
ach, kann man auch mit anderen Funken, als die von Multiplex, AutoQuad pilotieren
?Anhänge
-
 35 KB Aufrufe: 12
35 KB Aufrufe: 12 -
 642,2 KB Aufrufe: 24
642,2 KB Aufrufe: 24 -
 579,1 KB Aufrufe: 16
579,1 KB Aufrufe: 16 -
 576 KB Aufrufe: 22
576 KB Aufrufe: 22 -
 510,5 KB Aufrufe: 24
510,5 KB Aufrufe: 24
Sauberes Fluggerät - Glückwunsch zum neuen Hexa!
Und danke für den ausführlichen Bericht. Die Fühler sehen lustig aus.
Was mir nich gefällt, is der Empfänger so knapp über den Sensoren. Da solltest Du auf alle Fälle mal ein Trockenlog machen und schauen, ob die Funke irgendeinen Einfluss hat. Ich könnt mir z.B. gut vorstellen, dass der Kompass/Mag nich so happy is...
Die Frage am Ende war nich Ernst gemeint, oder?
Und danke für den ausführlichen Bericht. Die Fühler sehen lustig aus.
Was mir nich gefällt, is der Empfänger so knapp über den Sensoren. Da solltest Du auf alle Fälle mal ein Trockenlog machen und schauen, ob die Funke irgendeinen Einfluss hat. Ich könnt mir z.B. gut vorstellen, dass der Kompass/Mag nich so happy is...
Die Frage am Ende war nich Ernst gemeint, oder?
Zuletzt bearbeitet:
Ui, Du hast Rubina auf 62cm Spannweite gestreckt? Lass mich mal an Deinen Ergebnissen teilhaben. Ich habe zwar die Centerplates für maximale Steifheit extra groß gemacht (Verhältnis Spannweite zu CP Durchmesser: < 3:1), doch 8cm mehr machen bei so einem Rahmen schon eine Menge aus.
Ansonsten Glückwunsch zum neuen Fluggerät.
Ansonsten Glückwunsch zum neuen Fluggerät.
Hier ist die Version 0.95:
http://autoquad.org/software-downloads/?did=68
Und hier der Originalthread:
http://forum.autoquad.org/viewtopic.php?f=33&t=1148
http://autoquad.org/software-downloads/?did=68
Und hier der Originalthread:
http://forum.autoquad.org/viewtopic.php?f=33&t=1148
Ich habe eine Frage bezüglich den AutoQuad led controller: es heisst dass man den Code in die Download sektion runterladen can (signaling_addon.zip) aber ich kann keine finden... Wenn ich den Code dann habe, werde ich aber wahrscheinlich unterstützung brauchen um den Code zu verändern ;-)
Danke Autokram, aber da handelt es sich um die Lösung mit Mavlink. Ich würde lieber die andere Möglichkeit wo man keine zusätliche Karte braucht benutzen, also das hier: http://autoquad.org/wiki/wiki/development/user-add-ons/external-signaling-ledbeeper/
Aber dort:
http://autoquad.org/wiki/wiki/development/user-add-ons/mavlink-led-signaling-hott/
wird gescheiben: "This code is not part of the main code and must be customized for the specific needs and setup."
Und dann: "A small package called signaling_addon.zip is available in the download section, in this section the changes for the main code are explained."
Oder ist das Signaling mittlerweile im Code integriert? Aber dann gleich die nächste frage: wo finde ich der Code um die Led Ports umzuändern?
Vielen Dank, Vincent
http://autoquad.org/wiki/wiki/development/user-add-ons/mavlink-led-signaling-hott/
wird gescheiben: "This code is not part of the main code and must be customized for the specific needs and setup."
Und dann: "A small package called signaling_addon.zip is available in the download section, in this section the changes for the main code are explained."
Oder ist das Signaling mittlerweile im Code integriert? Aber dann gleich die nächste frage: wo finde ich der Code um die Led Ports umzuändern?
Vielen Dank, Vincent
Zuletzt bearbeitet:
Ich habe gerade nochmal gelesen was ich an Kinderkram geschrieben habe und festgestellt dass aus seiner Nutzername "Kinderkram" und das Wort "Autoquad" einer neuer Name erfunden habe: Autokram
Mein Gehirn hat die neue zusammenstellung ohne mich gemacht und gleich geschrieben. Also es war keine Absicht falls es beleidigend wahrgenommen wurde... Ich bin jetzt vorsichtig geworden nachdem mache Forumnutzer für kleine Bagatellen dieser Art mich gleich schlecht bewertet haben...
Mein Gehirn hat die neue zusammenstellung ohne mich gemacht und gleich geschrieben. Also es war keine Absicht falls es beleidigend wahrgenommen wurde... Ich bin jetzt vorsichtig geworden nachdem mache Forumnutzer für kleine Bagatellen dieser Art mich gleich schlecht bewertet haben...
Zuletzt bearbeitet:
Servus Leute
Ich hab da mal ne kleine Frage bezüglich Regler ... "will da nämlich mit dem AQ kein AutoKram oder KinderQuad baun" sorry musste sein.
ja Regler ... wegen der kommenden L1 Steuerung ... geht die nur mit den Auto ESC32? oder würden da auch die UltraESC's reichen?
Die andere frage ist natürlich wenns den mal da ist, welchen Vorteil die Ansteuerung via Can-Bus hat.
kann mir da wer weiterhelfen?
Ich hab da mal ne kleine Frage bezüglich Regler ... "will da nämlich mit dem AQ kein AutoKram oder KinderQuad baun" sorry musste sein.
ja Regler ... wegen der kommenden L1 Steuerung ... geht die nur mit den Auto ESC32? oder würden da auch die UltraESC's reichen?
Die andere frage ist natürlich wenns den mal da ist, welchen Vorteil die Ansteuerung via Can-Bus hat.
kann mir da wer weiterhelfen?
Hallo,
bin neu hier. Hab auch mal eine kurze Frage zu Autoquad: Gibt es eine Möglichkeit normale SimonK-Regler mithilfe von Autoquad und der GUI anzulernen, also maximale und minimale PWM auzugeben, sowie es neuerdings bei MultiWii möglich ist. Ich hab dazu noch keine Funktion in der GUI gefunden.
Der Umweg jeden ESC über den Empfänger der Funke einzulernen, ist ja eigentlich nicht mehr zeitgemäß.
Grüße
Robin
bin neu hier. Hab auch mal eine kurze Frage zu Autoquad: Gibt es eine Möglichkeit normale SimonK-Regler mithilfe von Autoquad und der GUI anzulernen, also maximale und minimale PWM auzugeben, sowie es neuerdings bei MultiWii möglich ist. Ich hab dazu noch keine Funktion in der GUI gefunden.
Der Umweg jeden ESC über den Empfänger der Funke einzulernen, ist ja eigentlich nicht mehr zeitgemäß.
Grüße
Robin

