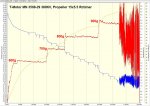
Habe nochmal ein wenig getestet: dieses mal mit dem RCT5010-360 (relativ hochohmiger 14-Poler). Dieser Motor läuft jetzt mit dem gewichtsmäßig sehr leichten 15x7.5 seidig und tourt blitzartig hoch (Messungen -> ToDo-Liste).
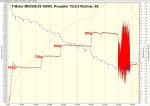
Schraube ich jedoch einen eher schweren 16x5.5 mit breiten Blättern drauf, sehe ich die rote LED beim schlagartigen Beschleunigen (20->100%). Strommäßig ist dieser Prop relativ identisch zum 15er mit hoher Steigung. Akkustisch hätte ich jedoch die Sync-Fehler vermutlich nicht bemerkt, erst nach roten LED und gezieltem Hören mit bekanntem Ergebnis.
Mit Timing-Variation ließ sich das Problem zwar beeinflussen, aber nicht abstellen (getestet 8-23°). Allerings ist es beim Standardtiming von 18° verschwunden, sobald man SLOW_THROTTLE auf 1 setzt. Das Beschleunigungsverhalten ist dann etwas schlechter, aber m.E. immmer noch sehr akzeptabel.
Noch eine Kleinigkeit, möglicherweise ist das noch eine Software-Unschönheit: beim Ausdrehen des Motors mit Gas=0 gibt es einen Bereich kurz vor dem Stillstand, wo die rote LED ebenfalls blitzt. Gibt man genau zu dem Zeitpunkt Gas, gibt es Gestotter, egal mit welchem Prop.
Schraube ich jedoch einen eher schweren 16x5.5 mit breiten Blättern drauf, sehe ich die rote LED beim schlagartigen Beschleunigen (20->100%). Strommäßig ist dieser Prop relativ identisch zum 15er mit hoher Steigung. Akkustisch hätte ich jedoch die Sync-Fehler vermutlich nicht bemerkt, erst nach roten LED und gezieltem Hören mit bekanntem Ergebnis.
Mit Timing-Variation ließ sich das Problem zwar beeinflussen, aber nicht abstellen (getestet 8-23°). Allerings ist es beim Standardtiming von 18° verschwunden, sobald man SLOW_THROTTLE auf 1 setzt. Das Beschleunigungsverhalten ist dann etwas schlechter, aber m.E. immmer noch sehr akzeptabel.
Noch eine Kleinigkeit, möglicherweise ist das noch eine Software-Unschönheit: beim Ausdrehen des Motors mit Gas=0 gibt es einen Bereich kurz vor dem Stillstand, wo die rote LED ebenfalls blitzt. Gibt man genau zu dem Zeitpunkt Gas, gibt es Gestotter, egal mit welchem Prop.
Zuletzt bearbeitet:
")